自控总结(自用)
自控原理
第一&二章:
定义:
- 控制(CONTROL)----某个主体使某个客体按照一定的目的动作。
- 主体–人:人工控制; 机器:自动控制
- 客体–指一件物体,一套装置,一个物化过程,一个特定系统。
要求:快准稳
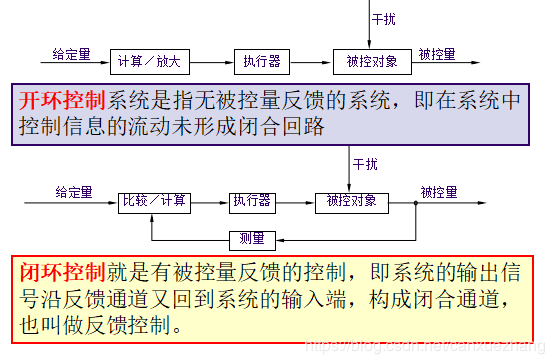
类型:开环闭环
开环闭环区别:
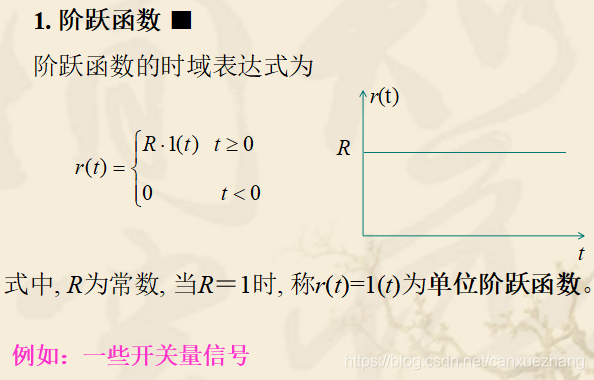
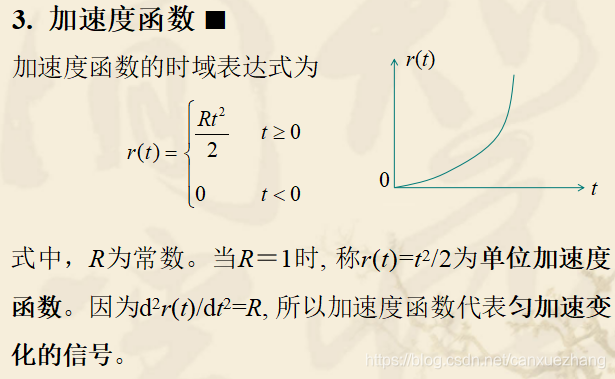
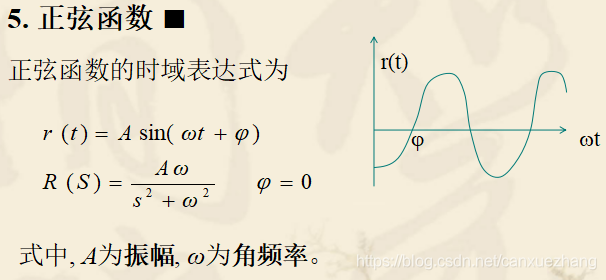
输入信号:


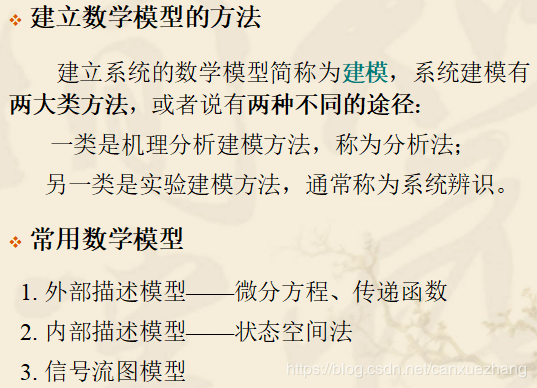
数学模型:
4. 方框图
------------------------------------------------------------------------------------------------------
传递函数:
def:只适用线性定常系统

way: 梅森,拉氏变换
化简:

第三章:时域分析
性能指标:控制系统的性能评价分为动态性能指标和稳态性能指标两类。(下为时域指标)

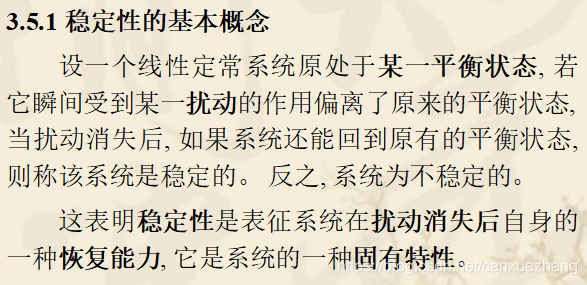
稳定性:
判断方法:
- 特征极点(物理意义从微分方程处着手)
- 劳斯判(列劳斯表)
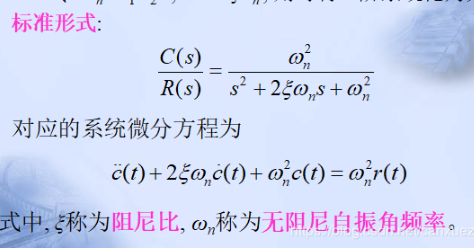
二阶系统:
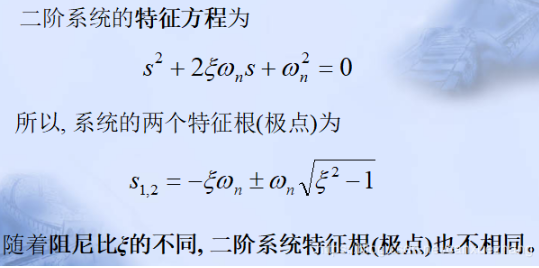
极点不同,所以其特性不同
 衰减震荡
衰减震荡
 等幅震荡
等幅震荡
 刚好无超调
刚好无超调
 无超调
无超调

稳态误差:
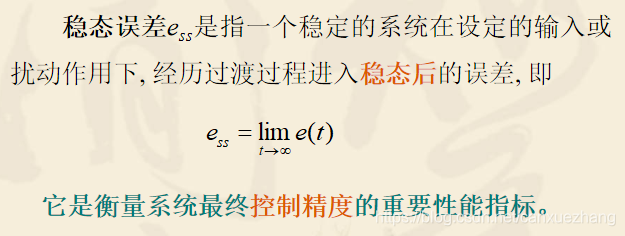
分析方法:
- 通过系统的性别
- 终值定理
高阶系统降阶:偶极子,零极点相消
或者拆开分析,例如三阶系统,可以用部分分式或者留数法分解为一阶和二阶的叠加。、
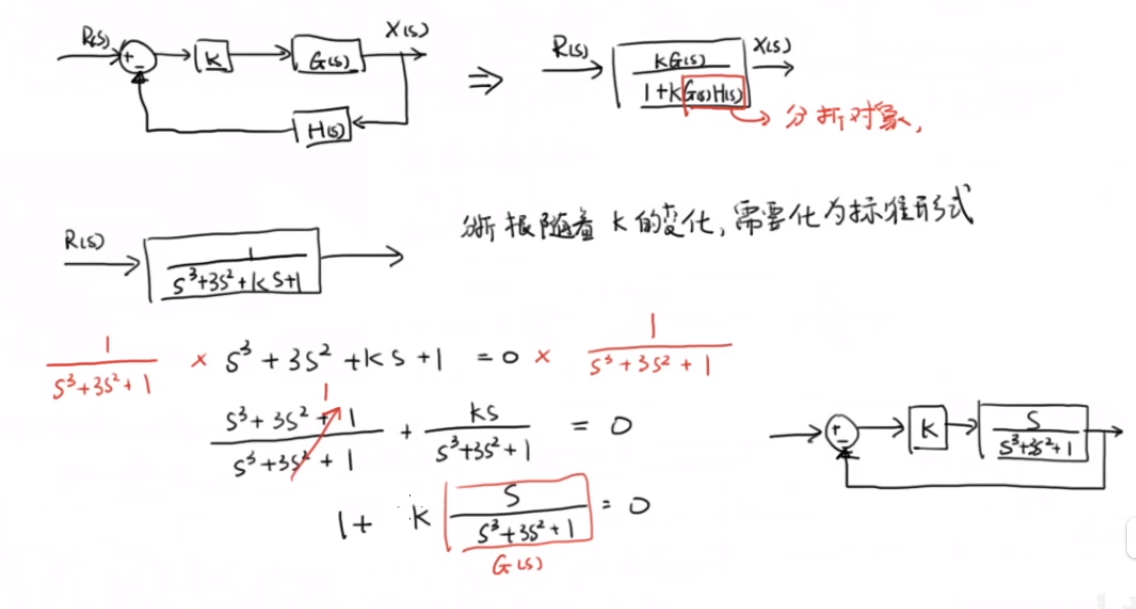
第四章:根轨迹
根轨迹清晰地描绘了闭环极点与开环增益K的关系,计算机绘制根轨迹大多采用直接求解特征方程的方法,也就是每改变一次增益K求解一次特征方程。

当K从0到00对闭环极点的分布变化

根=极点
第五章:频域分析
频率特性:正弦输入,幅值比,相角差
最小相位:
拉氏变换与傅里叶关:
伯德图:
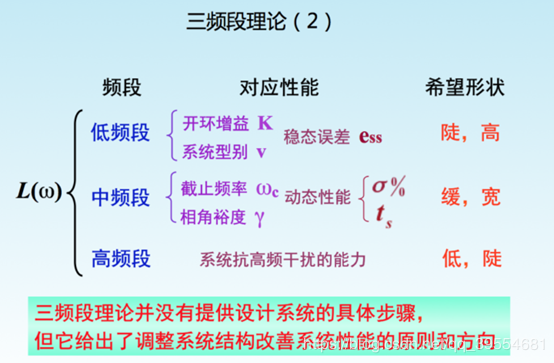
三频段:
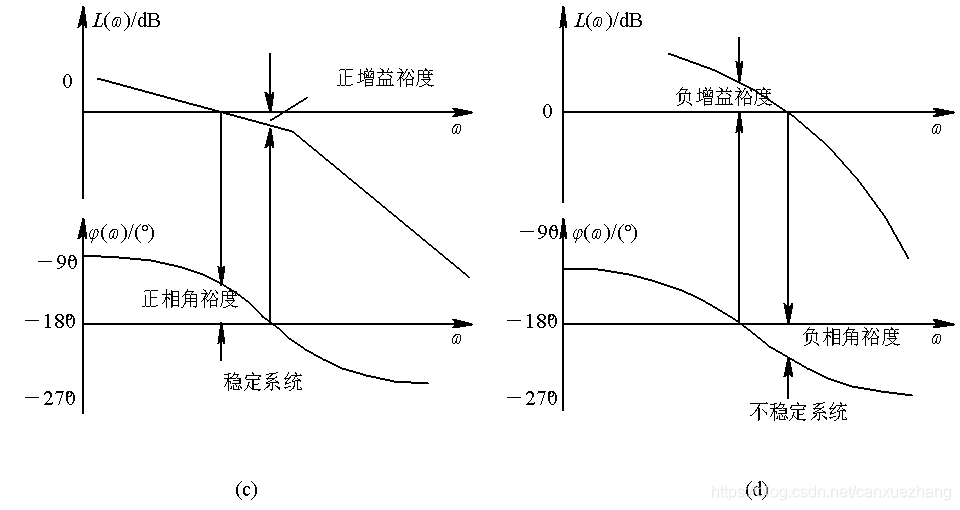
稳定裕度:

图 5-45 相角裕度和增益裕度
增益裕度


第六章:校正
def:
分类:串联,并联,前馈
分类:
超前:

滞后:
复合:
详述超前校正,滞后校正:
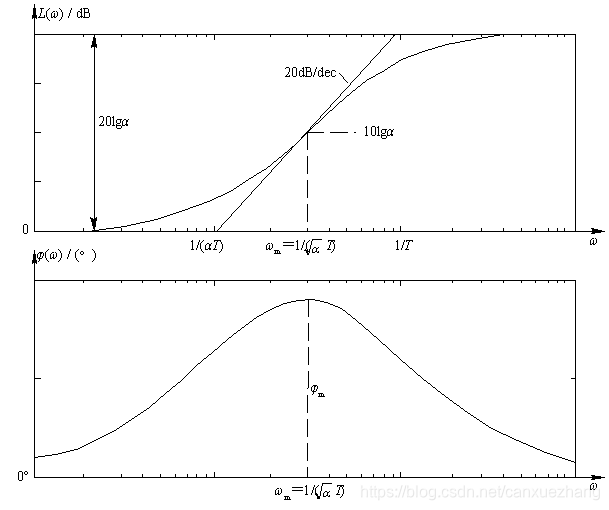
图6 超前网络的Bode图
相频曲线具有正相角,即网络的稳态输出在相位上超前于输入,故称为超前校正网络。
中频相角超前
滞后校正的伯德图如下图所示。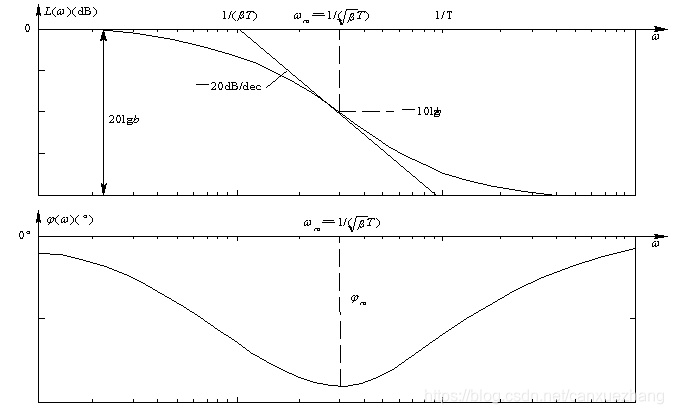
由于传递函数分母的时间常数大于分子的时间常数, 所以其幅频特性具有负斜率段, 相频特性出现负相移。
负相移表明, 校正网络在正弦信号作用下的正弦稳态输出信号, 在相位上迟后于输入信号, 所以称为迟后校正装置或迟后网络。
高频赋值衰减

PI控制器属于滞后校正
第七章:非线性
定义:不满足叠加定理
特性:继电 ,间隙, 饱和,死区
描述方法:描述函数,相平面
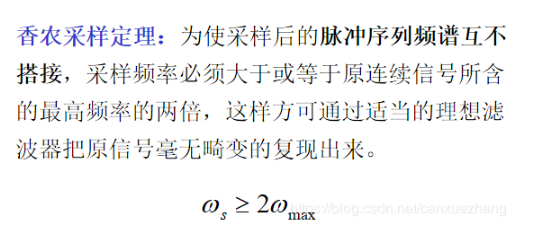
第八章:离散
采样:
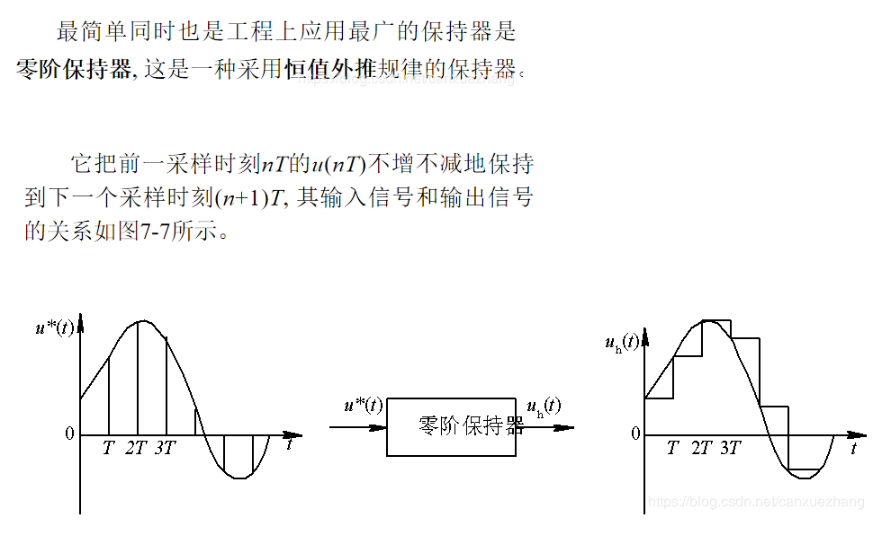
保持器:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号