改进初学者的PID-测量的比例介绍
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助。作者Brett Beauregard的原文网址:http://brettbeauregard.com/blog/2017/06/introducing-proportional-on-measurement/
已经有相当长的一段时间了,但我终于更新了Arduino PID库。我添加的是一个几乎未知的功能,但我认为这将是对爱好者社区的利好。它被称为 "测量的比例" (简称 PonM)。
1、为什么你应该关心

有一些进程被称为“集成进程”。在这些过程中,PID的输出控制输入的变化率。在工业中,这些只占所有过程的一小部分,但在业余爱好领域,这些家伙无处不在:真空低温烹饪、线性幻灯片和3D打印机挤出机温度控制都是这类过程的例子。
这些过程令人沮丧的是,使用传统的 PI 或 PID 控制,它们会超过设定值。不是有时,而是总是:
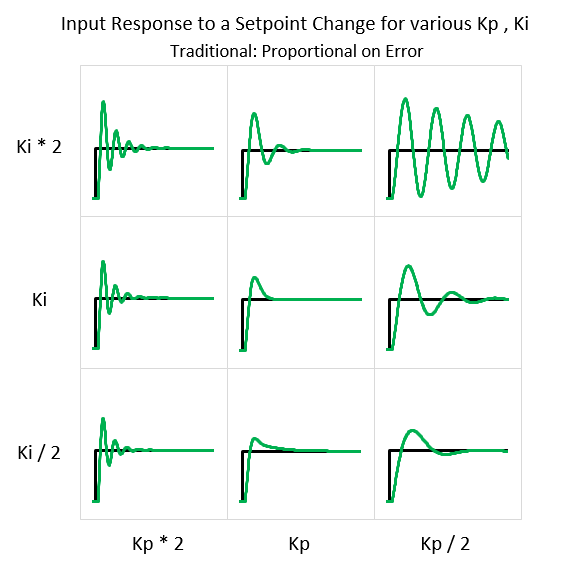
如果你不知道这件事,这可能会让你抓狂。您可以永远调整调优参数,超调仍然存在;基础数学就是这样。测量的比例改变了基础数学。因此,在不发生超调的情况下,可以找到一组调优参数:
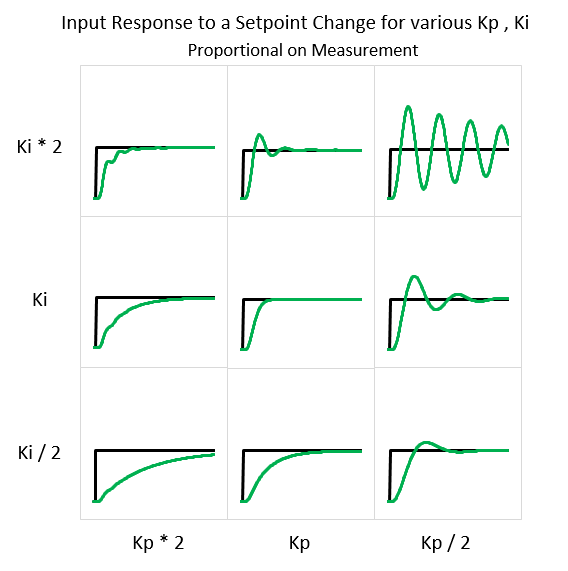
超调仍然可以肯定,但这并非不可避免。有了 PonM 和正确的整定参数,那个低温烹饪或线性滑块就可以直接延伸到设定值,而不是超过设定值。
2、那么什么是测量的比例呢?
与基于测量的微分类似,PonM 改变了比例项所关注的内容。比例项采用PID 输入的当前值代替偏差进行计算。
基于偏差的比例:

基于测量的比例:

与基于测量的微分不同,它对性能的影响是巨大的。对于 DonM,微分项仍然有相同的作用:抵制急剧的变化,从而抑制由P和I比例测量驱动的振荡,另一方面,从根本上改变比例项的作用。它不是像I一样的驱动力,而是像 D 一样成为阻力的力量。这意味着,对于PonM,一个更大的 Kp 将使您的控制器更加保守。
3、很好。但这如何消除超调呢?
要理解这个问题并修复它,看看不同的项以及它们对整个PID输出的贡献是很有帮助的。下面是对使用传统 PID 的集成进程 (真空低温烹饪) 的设定值更改的响应:
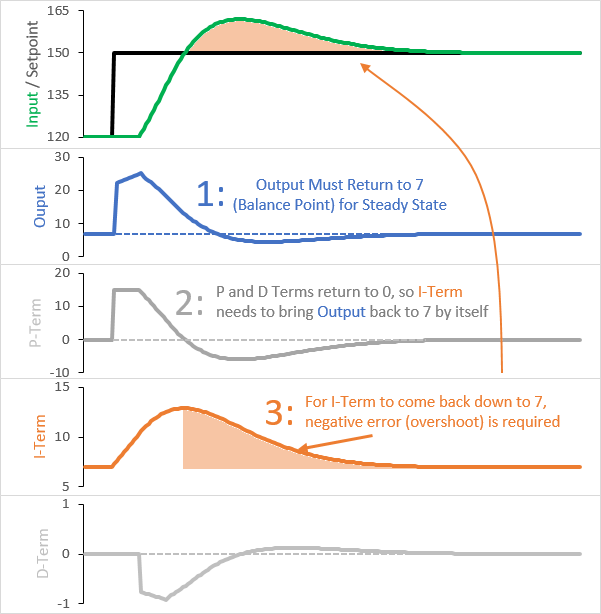
需要注意的两大事项是:
- 当我们处于设定值时,积分项是总体输出的唯一贡献者。
- 即使起点和终点的设定值不同,输出也会返回到相同的值。此值通常称为“平衡点“:导致0输入斜率的输出。对于真空低温烹饪来说,这相当于足够的热量来补偿周围的热损失。
在这里,我们可以看到为什么会发生超调,而且总是会发生。当设定值第一次更改时,偏差将导致积分项的增长。为了使进程在新的设定值保持稳定,输出将需要返回到平衡点。要做到这一点,唯一的办法就是积分项收缩。发生这种情况的唯一方法是负误差,只有在超过设定值时才会发生。
4、PonM改变了游戏规则
下面是使用基于测量的比例 (和相同的调谐参数) 控制的相同的真空低温烹饪:
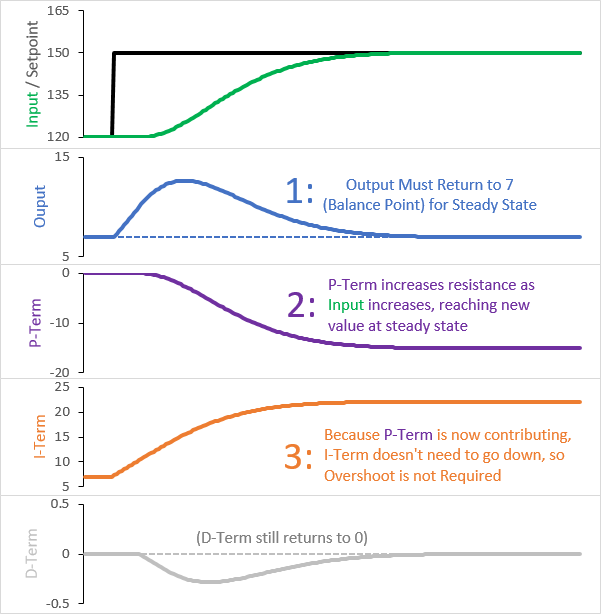
在这里,您应该注意到:
- P项现在提供了一个阻力。输入越高,它就负的越多。
- P项在新的设定值变为零之前,它会一直有值。
关键是P项不会返回到0。这意味着I项不必单独返回到平衡点。P和I一起可以将输出返回到平衡点,而无需收缩I项。因为它不需要收缩,所以不存在超调。
5、如何在新的 PID 库中使用它
如果您已准备好尝试 "测量的比例",并且安装了最新版本的PID库,则设置它是相当容易的。使用 PonM 的主要方法是在重载构造函数中指定它:

如果要在运行时在 PonM 和 PonE 之间切换,则 "设置" 函数也会重载:

您只需要在需要切换时调用重载方法。否则,您可以使用常规的设置调整功能,它将记住您的选择。
欢迎关注:

如果阅读这篇文章让您略有所得,还请点击下方的【好文要顶】按钮。
当然,如果您想及时了解我的博客更新,不妨点击下方的【关注我】按钮。
如果您希望更方便且及时的阅读相关文章,也可以扫描上方二维码关注我的微信公众号【木南创智】

 浙公网安备 33010602011771号
浙公网安备 33010602011771号