改进初学者的PID-修改整定参数
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助。作者Brett Beauregard的原文网址:http://brettbeauregard.com/blog/2011/04/improving-the-beginner%E2%80%99s-pid-tuning-changes/
1、问题
对于任何可靠的PID算法,拥有在系统运行时更改整定参数的能力都是必须的。
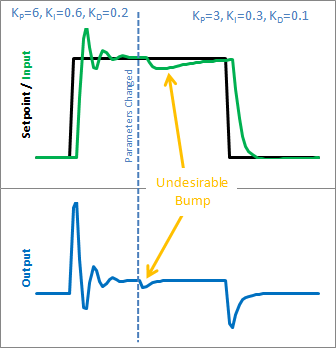
如果你试图在系统运行时改变整定参数,在初学PID的人看来会显得有点疯狂。让我们看看这是为什么?以下是初学者的 PID 在上述参数更改前后的状态:
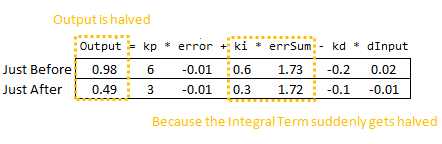
因此,我们可以立即将这种差异归咎于积分项(或“I项”)。只有当参数发生变化时,它才会发生剧烈的变化。为什么会这样?这与初学积分的人对积分的理解有关:

这种解释在 Ki 被改变之前都是可以正常工作的。然后,你突然把这个新的 Ki 乘以你积累的整个误差总和。这不是我们想要的!我们只想影响事情后续的发展。
2、解决方案
有几种方法可以处理这个问题。我在上一个库中使用的方法是重新缩放偏差累计。Ki 翻了一倍?或者把偏差累计削减一半。这可以避免积分项撞击,并且也能工作的很好。不过,这有点笨拙,我想出了更优雅的东西。(我不可能是第一个想到这个问题,但我确实是一个人想到的。这算数!)
这个方案需要一个小的基本代数 (还是微积分?)
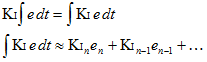
我们不是让 Ki 处在积分之外,而是把它带到里面。看起来我们视乎什么都没做,但我们会看到,在实践中,这带来了很大的变化。
现在,我们把误差乘以那个时候的Ki。然后我们存储它的和。当Ki发生变化时,没有任何变化,因为所有旧的Ki都已经“存在银行”了。我们得到一个平稳的转换,没有额外的数学运算。这可能会让我成为一个极客,但我觉得这很性感。
3、代码
1 /*working variables*/ 2 unsigned long lastTime; 3 double Input,Output,Setpoint; 4 double ITerm,lastInput; 5 double kp,ki,kd; 6 int SampleTime = 1000; //1 sec 7 void Compute() 8 { 9 unsigned long now = millis(); 10 int timeChange = (now - lastTime); 11 if(timeChange>=SampleTime) 12 { 13 /*Compute all the working error variables*/ 14 double error = Setpoint - Input; 15 ITerm += (ki * error); 16 double dInput = (Input - lastInput); 17 18 /*Compute PID Output*/ 19 Output = kp * error + ITerm - kd * dInput; 20 21 /*Remember some variables for next time*/ 22 lastInput = Input; 23 lastTime = now; 24 } 25 } 26 27 void SetTunings(double Kp,double Ki,double Kd) 28 { 29 double SampleTimeInSec = ((double)SampleTime)/1000; 30 kp = Kp; 31 ki = Ki * SampleTimeInSec; 32 kd = Kd / SampleTimeInSec; 33 } 34 35 void SetSampleTime(int NewSampleTime) 36 { 37 if (NewSampleTime > 0) 38 { 39 double ratio = (double)NewSampleTime 40 / (double)SampleTime; 41 ki *= ratio; 42 kd /= ratio; 43 SampleTime = (unsigned long)NewSampleTime; 44 } 45 }
因此,我们用复合积分项变量替换了 [第4行]偏差求和变量。它计算 Ki * 偏差,而不仅仅是偏差 [第15行]。此外,由于 Ki 现在被隐藏在积分项中,因此它将从主 PID 计算 [第19行] 中删除。
4、结果

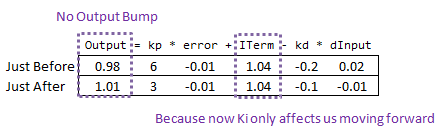
那么,这是如何解决问题的。在修改Ki之前,它重新计算了所有偏差的总和;我们看到的每一个偏差值。有了这段代码,之前的偏差将保持不变,而新的Ki只会影响事情的进展,这正是我们想要的。
译注:对于本篇讨论的修改整定参数对积分项的影响问题。采用位置式PID公式确实存在这一问题,作者的解决方式也很赞。因为这就是增量式PID积分项的默认处理方式。所以如果采用增量式PID就不会存在这个问题了。
欢迎关注:

如果阅读这篇文章让您略有所得,还请点击下方的【好文要顶】按钮。
当然,如果您想及时了解我的博客更新,不妨点击下方的【关注我】按钮。
如果您希望更方便且及时的阅读相关文章,也可以扫描上方二维码关注我的微信公众号【木南创智】

 浙公网安备 33010602011771号
浙公网安备 33010602011771号