
改进初学者的PID-微分冲击
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助。作者Brett Beauregard的原文网址:http://brettbeauregard.com/blog/2011/04/improving-the-beginner%E2%80%99s-pid-derivative-kick/
1、问题
这个修改将稍微调整微分项。其目标是消除一种被称为“微分冲击”的现象。

上图说明了问题。由于error = Setpoint-Input,设定值的任何变化都会导致偏差的瞬时变化。这种变化的导数是无穷大(实际上,由于dt不是0,它只是一个非常大的数字。)这个数字被输入PID方程,这导致输出中出现不希望的峰值。幸运的是,有一种简单的方法可以摆脱这种情况。
2、解决方案
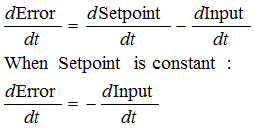
事实证明,当设定值发生变化时,偏差的导数等于输入的负导数。这最终成为一个完美的解决方案。我们减去(Kd *输入的导数)而不是添加(Kd *偏差的导数)。这被称为使用“基于测量的微分”。
3、代码
1 /*working variables*/ 2 unsigned long lastTime; 3 double Input,Output,Setpoint; 4 double errSum,lastInput; 5 double kp,ki,kd; 6 int SampleTime = 1000; //1 sec 7 void Compute() 8 { 9 unsigned long now = millis(); 10 int timeChange = (now - lastTime); 11 if(timeChange>=SampleTime) 12 { 13 /*Compute all the working error variables*/ 14 double error = Setpoint - Input; 15 errSum += error; 16 double dInput = (Input - lastInput); 17 18 /*Compute PID Output*/ 19 Output = kp * error + ki * errSum - kd * dInput; 20 21 /*Remember some variables for next time*/ 22 lastInput = Input; 23 lastTime = now; 24 } 25 } 26 27 void SetTunings(double Kp,double Ki,double Kd) 28 { 29 double SampleTimeInSec = ((double)SampleTime)/1000; 30 kp = Kp; 31 ki = Ki * SampleTimeInSec; 32 kd = Kd / SampleTimeInSec; 33 } 34 35 void SetSampleTime(int NewSampleTime) 36 { 37 if (NewSampleTime > 0) 38 { 39 double ratio = (double)NewSampleTime 40 / (double)SampleTime; 41 ki *= ratio; 42 kd /= ratio; 43 SampleTime = (unsigned long)NewSampleTime; 44 } 45 }
这里的修改非常简单。我们用-dInput替换+ dError。我们现在需要记住lastInput,而不是记住lastError
4、结果
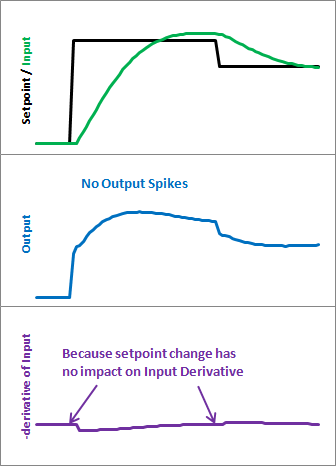
以下是这些修改对我们的影响。请注意,输入看起来仍然相同。所以我们得到相同的性能,但是每次设定点改变时我们都不会发出巨大的输出尖峰。
这也许没什么大不了的。这完全取决于应用程序对输出峰值有多敏感。但在我看来,没有冲击就不需要做更多的工作,所以为什么不把事情做好呢?
欢迎关注:

如果阅读这篇文章让您略有所得,还请点击下方的【好文要顶】按钮。
当然,如果您想及时了解我的博客更新,不妨点击下方的【关注我】按钮。
如果您希望更方便且及时的阅读相关文章,也可以扫描上方二维码关注我的微信公众号【木南创智】

 浙公网安备 33010602011771号
浙公网安备 33010602011771号