
Tensorflow 中的优化器解析
Tensorflow:1.6.0
优化器(reference:https://blog.csdn.net/weixin_40170902/article/details/80092628)
I: tf.train.GradientDescentOptimizer Tensorflow中实现梯度下降算法的优化器。
梯度下降:(1)标准梯度下降GD(2)批量梯度下降BGD(3)随机梯度下降SGD
(1)标准梯度下降:学习训练的模型参数为W,代价函数为J(W),则代价函数关于模型参数的偏导数即相关梯度为dJ(W),学习率为eta,梯度下降法更新参数公式:

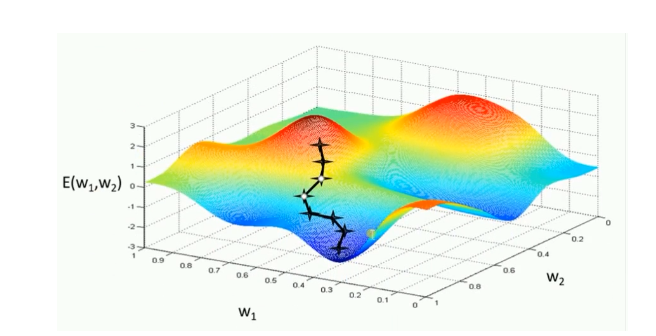
模型参数的调整沿着梯度方向不断减小的方向最小化代价函数。基本策略:在有限视野内寻找最快下山路径,每迈出一步参考当前位置最陡的梯度方向,从而决定下一步。
评价:GD的两个缺点
(1)训练速度慢:每进行一步都要计算调整下一步方向,在大型数据中,每个样本都更新一次参数,且每次迭代要遍历所有样本,需要很长时间进行训练和达到收敛。
(2)易陷入局部最优解:在有限的范围内寻找路径,当陷入相对较平的区域,误认为最低点(局部最优即鞍点),梯度为0,不进行参数更新。
(2)批量梯度下降BGD:学习训练样本的总数为n,每次样本i形式为(Xi,Yi),模型参数为W,代价函数为J(W),每个样本i的代价函数关于W的梯度为dJi(Wt,Xi,Yi),学习率eta_t,跟新参数表达式为:
 模型参数的更新与全部输入样本的代价函数和有关。每次权重的更新发生在批量输入样本之后,大大加快训练速度。
模型参数的更新与全部输入样本的代价函数和有关。每次权重的更新发生在批量输入样本之后,大大加快训练速度。
评价:BGD比GD训练时间短,而且每次下降的方向都很正确。
#-*- coding: utf-8 -*- #BGD python 实现 import random #用y = Θ1*x1 + Θ2*x2来拟合下面的输入和输出 #input1 1 2 5 4 #input2 4 5 1 2 #output 19 26 19 20 input_x = [[1,4], [2,5], [5,1], [4,2]] #输入 y = [19,26,19,20] #输出 theta = [1,1] #θ参数初始化 loss = 10 #loss先定义一个数,为了进入循环迭代 step_size = 0.01 #步长 eps =0.0001 #精度要求 max_iters = 10000 #最大迭代次数 error =0 #损失值 iter_count = 0 #当前迭代次数 err1=[0,0,0,0] #求Θ1梯度的中间变量1 err2=[0,0,0,0] #求Θ2梯度的中间变量2 while( loss > eps and iter_count < max_iters): #迭代条件 loss = 0 err1sum = 0 err2sum = 0 for i in range (4): #每次迭代所有的样本都进行训练 pred_y = theta[0]*input_x[i][0]+theta[1]*input_x[i][1] #预测值 err1[i]=(pred_y-y[i])*input_x[i][0] err1sum=err1sum+err1[i] err2[i]=(pred_y-y[i])*input_x[i][1] err2sum=err2sum+err2[i] theta[0] = theta[0] - step_size * err1sum/4 #对应5式 theta[1] = theta[1] - step_size * err2sum/4 #对应5式 for i in range (4): pred_y = theta[0]*input_x[i][0]+theta[1]*input_x[i][1] #预测值 error = (1/(2*4))*(pred_y - y[i])**2 #损失值 loss = loss + error #总损失值 iter_count += 1 print ("iters_count", iter_count) print ('theta: ',theta ) print ('final loss: ', loss) print ('iters: ', iter_count)
(3)随机梯度下降法(SGD):从一批训练样本n中随机选取一个样本i,模型参数为W,代价函数为J(W),梯度为dJ(W),学习率为eta,则使用SGD进行更新参数公式为:

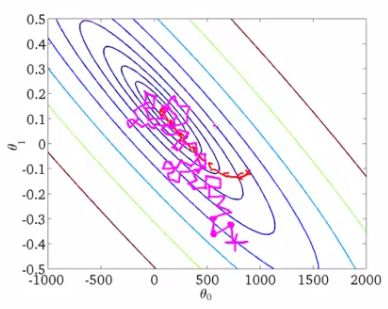
SGD不需要每一步都计算梯度,但最终能达到低点,只是过程会比较崎岖。
评价:优点:计算梯度快,对于小噪声,SGD可以很好收敛。对于大型数据,训练很快,从数据中取大量的样本算一个梯度,更新一下参数。
缺点:在随机选择梯度时会引入噪声,权值更新方向可能出现错误。SGD未能克服全局最优。
#-*- coding: utf-8 -*- #SGD-python实现 import random #用y = Θ1*x1 + Θ2*x2来拟合下面的输入和输出 #input1 1 2 5 4 #input2 4 5 1 2 #output 19 26 19 20 input_x = [[1,4], [2,5], [5,1], [4,2]] #输入 y = [19,26,19,20] #输出 theta = [1,1] #θ参数初始化 loss = 10 #loss先定义一个数,为了进入循环迭代 step_size = 0.01 #步长 eps =0.0001 #精度要求 max_iters = 10000 #最大迭代次数 error =0 #损失值 iter_count = 0 #当前迭代次数 while( loss > eps and iter_count < max_iters): #迭代条件 loss = 0 i = random.randint(0,3) #每次迭代在input_x中随机选取一组样本进行权重的更新 pred_y = theta[0]*input_x[i][0]+theta[1]*input_x[i][1] #预测值 theta[0] = theta[0] - step_size * (pred_y - y[i]) * input_x[i][0] theta[1] = theta[1] - step_size * (pred_y - y[i]) * input_x[i][1] for i in range (3): pred_y = theta[0]*input_x[i][0]+theta[1]*input_x[i][1] #预测值 error = 0.5*(pred_y - y[i])**2 loss = loss + error iter_count += 1 print ('iters_count', iter_count) print ('theta: ',theta ) print ('final loss: ', loss) print ('iters: ', iter_count)
II tf.train.MomentumOptimizer tensorflow中实现动量优化算法的优化器
动量优化算法在梯度下降法的基础上进行改变,具有加速梯度下降的作用。类别:(1)标准动量优化方法Momentum,(2)NAG动量优化方法(NAG在Tensorflow中与Momentum合并在同一函数tf.train.MomentumOptimizer中,可以通过参数配置启用。)
(1)Momentum:引入一个累计历史梯度信息动量加速SGD。优化公式如下:

alpha代表动力大小,一般取为0.9(表示最大速度10倍于SGD)。动量解决SGD的两个问题:(1)SGD引入的噪声(2)Hessian矩阵病态(SGD收敛过程的梯度相比正常来回摆动幅度较大)
当前权值的改变受上一次改变的影响,类似加上了惯性。
(2)NAG:牛顿加速梯度算法是Momentum变种,更新公式如下:
NAG的计算在模型参数施加当前速度之后,可以理解为在Momentum 中引入了一个校正因子。
在Momentum中,小球会盲目的跟从下坡的梯度,易发生错误。因此,需要提前知道下降的方向,同时,在快到目标点时速度会有所下降,以不至于超出。
 可以表示小球下一个大概的位置,从而知道下一个位置的梯度,然后使用当前位置来更新参数。NGD对凸批量梯度的收敛效果较大,而对NAG的效果作用不大。
可以表示小球下一个大概的位置,从而知道下一个位置的梯度,然后使用当前位置来更新参数。NGD对凸批量梯度的收敛效果较大,而对NAG的效果作用不大。
III自适应学习率优化算法:传统的优化算法将学习率设置为常数或者根据训练次数调节学习率。忽略了学习率其他变化的可能性。(1)AdaGrad(2)RMSProp(3)Adam(4)AdaDelta
(1)AdaGrad算法:(tf.train.AdgradOptimizer)
独立适应所有模型参数的学习率,缩放每个参数反比于其所有梯度历史平均值总和的平方根。具有代价函数最大梯度的参数相应的有快速下降的学习率,而小梯度的参数在学习率上有相对较小的下降。
 g_t,i代表t时刻,指定类别i,代价函数关于W的梯度。对于较高类别的数据,Adagrad给与越来越小的学习率,对于较少的类别数据,给予较大的学习率。Adagrad适用于数据稀疏或者分布不平衡的数据集。
g_t,i代表t时刻,指定类别i,代价函数关于W的梯度。对于较高类别的数据,Adagrad给与越来越小的学习率,对于较少的类别数据,给予较大的学习率。Adagrad适用于数据稀疏或者分布不平衡的数据集。
评价:优点:无需人为调节学习率,可以自动调节。缺点;随着迭代次数增多,学习率越来越小,最终趋于0。
(2)RMSProp算法(tf.train.RMSPropOptimizer)
修改了AdaGrad的梯度累积为指数加权的移动平均,使在非凸下效果更好。
 代表前t次的梯度平方的均值。RMSProp的分母取了加权平均,避免学习率越来越低,同时可以自适应调节学习率。
代表前t次的梯度平方的均值。RMSProp的分母取了加权平均,避免学习率越来越低,同时可以自适应调节学习率。
(3)AdaDelta算法(tf.train.AdadeltaOptimizer):AdaGrad与RMSProp都需要指定全局学习率,AdaDelta结合两种算法每次参数的更新步长

评价:在训练的前中期,表现效果较好,加速效果可以,训练速度更快。在后期,模型会反复地在局部最小值附近抖动。
(4)Adam算法(tf.train.AdamOptimizer):动量直接并入了梯度一阶矩(指数加权)的估计。相比于,RMSProp缺少修正因子导致二阶矩估计在训练初期有较高的偏置,Adam包括偏置修正,从原始点初始化的一阶矩(动量项)和(非中心的)二阶矩估计。

评价:Adam对超参数的选择相当鲁棒。
不同优化器比较
下降速度上,三个自适应学习优化器 AdaGrad,RMSProp与AdaDelta的下降速度明显快于SGD,而Adagrad与RMSProp速度相差不大快于AdaDelta。两个动量优化器Momentum ,NAG初期下降较慢,后期逐渐提速,NAG后期超过Adagrad与RMSProt。
在有鞍点的情况下,自适应学习率优化器没有进入,Momentum与NAG进入后离开并迅速下降。而SGD进入未逃离鞍点。
速度:快->慢: Momenum ,NAG -> AdaGrad,AdaDelta,RMSProp ->SGD
收敛: 动量优化器有走岔路,三个自适应优化器中Adagrad初期走了岔路,但后期调整,与另外两个相比,走的路要长,但在快接近目标时,RMSProp抖动明显。SGD走的过程最短,而且方向比较正确。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号