论文阅读笔记十八:ENet: A Deep Neural Network Architecture for Real-Time Semantic Segmentation(CVPR2016)

论文源址:https://arxiv.org/abs/1606.02147
tensorflow github: https://github.com/kwotsin/TensorFlow-ENet
摘要
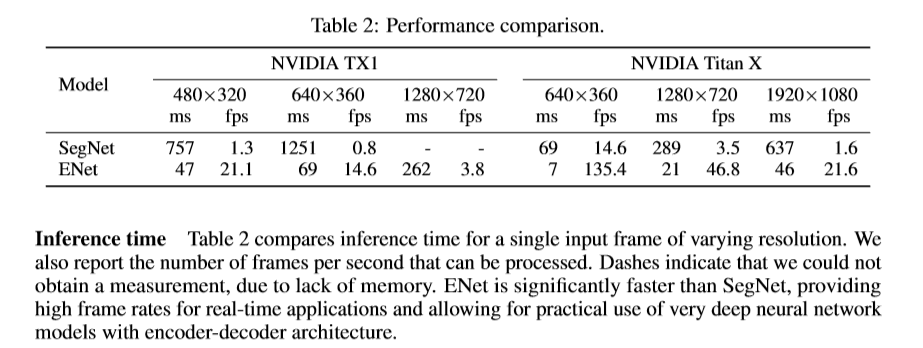
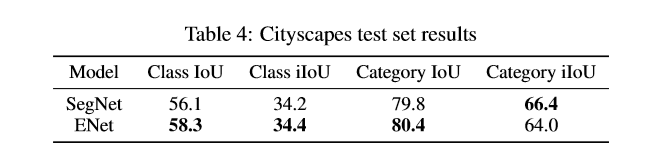
在移动端上进行实时的像素级分割十分重要。基于分割的深度神经网络中存在大量的浮点运算而且需要经过较长的时间才可以进行投入使用。该文提出的ENet目的是减少潜在的计算。ENet相比现存的分割网络,速度快18倍,参数量要少79倍,同时分割得到的准确率不有所损失,甚至有所提高。
介绍
目前,增强现实可穿戴设备,家庭智能设备,自动驾驶的兴起,迫切需要将语义分割(场景理解)算法移植到较低性能的移动端设备上。分割算法对图像中的每一个像素点进行类别标记。进来,较大的数据集与较强的计算资源(GPU,TPU)的出现促进了卷积神经网络超越传统的计算机视觉算法。尽管卷积网络在分类和识别任务取得较好的效果,但进行像素级分割时,仍生成较为粗糙的空间结果。因此,经常会在此算法基础上拼接其他算法来对结果进行增强,像基于颜色的分割,条件随机场等。
为了对图片进行空间分类和进行精细的分割,已经出现了像SegNet,FCN等网络结构,这些结构都是基于VGG-16的大型多分类网络。但其有大量的参数和长时间的推理时间。因此,这些网络并不适用于要求处理图片速度高于10fps的移动端或者电池供电的应用设备上。
该文所提出的网络结构主要应用于快速的推理与进行较高准确率的分割。
相关工作
语义分割对于图片理解与寻找目标发挥着重要的作用。在增强现实与自动驾驶中,语义分割发挥着举足轻重的作用,此外,实时性的要求也是极高的。当下的计算机视觉应用普遍使用深度神经网络。场景分析较好的卷积网络使用两阶段网络结构:编码层和解码层。受自编码器的启发。编码-解码结构的网络在SegNet中出现并得到了改进。编码部分类似于VGG的卷积网络用于对输入进行分类,而解码部分主要用于对编码网络部分的输出进行上采样。但这些网络的一个重大缺点是数量巨大的参数延长了其推理时间。不同于FCN,在SegNet中,VGG16的全连接层被移除,为了减少其浮点操作和内存的占用。但SegNet这种轻量级的网络仍无法做到实时分割。
其他结构基于较简单的分类器后接CRF作为一个后处理的步骤。这些复杂的后处理操作经常无法标记一帧图片中较小的物体。CNN可以结合RNN来提高准确率,但无法解决速度消失的问题。但RNN可以作为一种后处理手段与任何其他技术进行结合。
网络结构
ENet网络结构如下表格,该文参考ResNet,将其结构描述为一个主分支与一个带有卷积核的附加分支,最后进行像素级的相加融合。
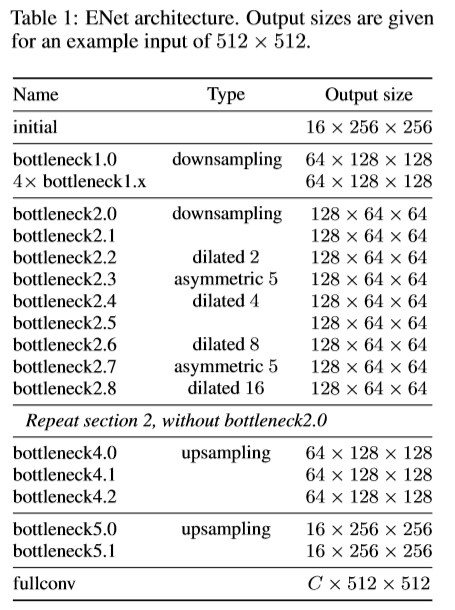
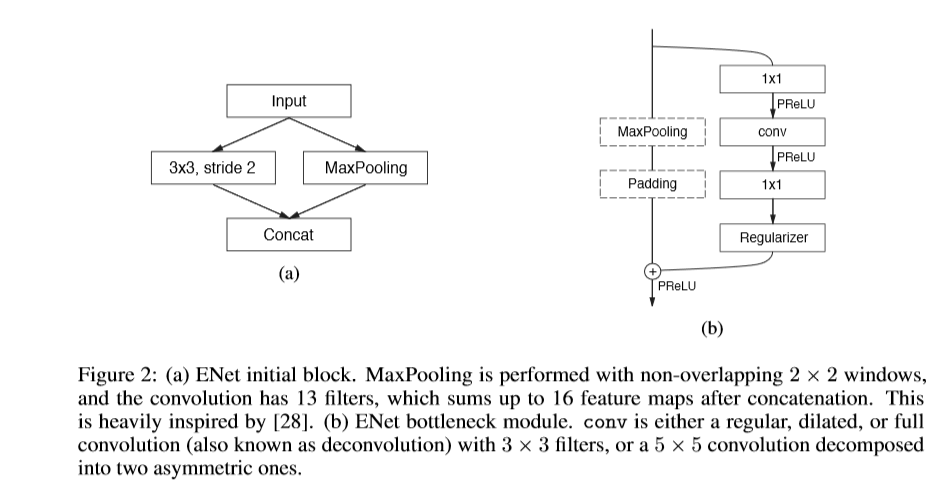
ENet中的每个block如下图b所示,每个block包含有三个卷积层:一个1x1的映射用于减少维度,一个主卷积层,一个1x1的扩张。将BN层与PReLU层穿插其中,将此结构组合定义为bottleneck 模型。如果bottleneck为下采样,则在主分支上添加一个最大池化层,同时,bollteneck中第一个1x1的映射被一个大小为2x2,stride为2的卷积进行替换,对激活值进行padding操作,使其与feature map的尺寸相匹配。卷积大小为3x3的,类型有普通卷积,空洞卷积,及转置卷积等,有时,用1x5或者5x1的非对称卷积对其替换。对于正则化处理,在bottleneck2.0之前使用p=0.01,其他条件下使p=0.1。
ENet的初始部分包含单独的一个block。如上图a.第一阶段包含5个bottleneck部分。第二,三阶段结构相同,但第三阶段的开始处并未有下采样的过程。前三个阶段属于编码阶段。第四五阶段属于解码阶段。由于cuDNN使用分离的内核进行卷积与偏差项的计算,为了减少内核的调用与内存的占用,该网络并未使用偏差项,结果发现,准确率也并未受很大的影响。在每个卷积层与pReLU层之间添加了一层BN层。在解码网络部分,最大池化层,被最大上采样层代替,padding被无偏差项的空间卷积替换。ENet在最后一个上采样过程中并未使用最大池化的索引,因为输入图片的通道为3,而输出通道数为类别数,最终,用一个全卷积模型作为网络的最后模型,占用部分解码网络的处理时间。
设计选择
Feature map的尺寸:语义分割中对图片进行下采样操作有两处缺点:(1)feature map分辨率的减少意味着空间位置信息的损失,如准确的边界信息等。(2)进行全像素的语义分割要求网络的输出大小要与输入的大小相同。这意味着对图片进行了下采样,就要进行形同程度的上采样。增加了模型的大小与计算资源。对于第一个问题,FCN通过添加编码层的feature map,SegNet通过保留编码网络中最大池化过程中最大值的索引,并借此在解码网络中生成稀疏的上采样maps。考虑到内存需要,该文使用SegNet的方式。同时,过分的下采样,十分不利于分割的准确率。
下采样的一个优点是:在下采样过的图片中进行卷积操作会有较大的感受野,从而可以获得更多的上下文信息。上下文信息十分利于不同类别的区分。该文发现使用空洞卷积的效果会更好。
Early downsampling: 要想实现较好的分割效果和实时的操作,要意识到处理较大的输入图片是十分消耗资源的。ENet的前两个block极大的减少了输入的尺寸,同时,只使用了一小部分feature map。由于可视化信息是高度空间冗余的,可以将其压缩为一种更有效的表达形式。网络的初始部分作用为特征提取及后续网络对输入的预处理。
解码尺寸大小:SegNet是一个极其对称的网络结构,ENet网络结构是非对称的,包含一个较大的编码层和一个小的解码网络。原因是编码层应该像原始分类网络的结构相似。用于处理较小的数据,同时进行信息的处理与滤波,解码网络对编码网络的输出进行上采样用于对细节的微调。
非线性操作:该文发现去掉网络初始层中的大部分ReLU层会提升分割的效果,作者认为此网络的深度不够深。然后,该文将所有ReLU替换为PReLUs,针对每张feature map增加了一个额外的参数。
信息保留的维度变化: 前半部分进行下采样是有必要的,但剧烈的维度衰减不利于信息的流动。为解决这个问题,该文任务在池化层后接一个卷积层增加了维度,进而增加了计算资源。为此,该文将池化操作与卷积操作进行并行操作,然后进行拼接。同时,在原始的ResNet的结构中,进行下采样时,第一个1x1的映射,在所有维度上进行的是步长为2的卷积,丢弃了75%左右的输入信息。将卷积核增加至2x2利于信息的保留。
分解卷积核: 一个二维的卷积可以被分解为两个维度为1的卷积核。(nxn => nx1,1xn),该文使用5x1,1x5的非对称卷积,减弱了函数学习的过拟合同时增加了感受野。卷积核的分解带来的另一个好处是可以减少大量的参数。加上非线性处理,使计算功能更加丰富。
空洞卷积:该文将bottleneck中的卷积层替换为空洞卷积并进行串联,增大了感受野,提高了分割的IOU。
正则化:目前的分割数据集有限,因此网络的训练很容易达到过拟合。该文使用空间Dropout进行处理。
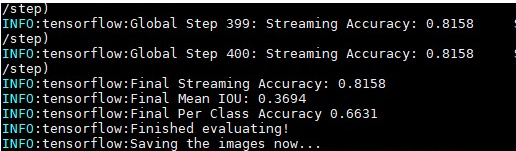
结果

Reference
[1] Y. LeCun and Y. Bengio, “Convolutional networks for images, speech, and time series,” The handbook of brain theory and neural networks, pp. 255–258, 1998.
[2] A. Krizhevsky, I. Sutskever, and G. E. Hinton, “Imagenet classification with deep convolutional neural networks,” in Advances in Neural Information Processing Systems 25, 2012, pp. 1097–1105.
[3] K. Simonyan and A. Zisserman, “Very deep convolutional networks for large-scale image recognition,” arXiv preprint arXiv:1409.1556, 2014.
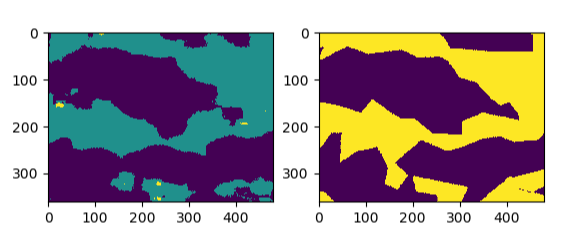
对于MFB的类别权重预处理得到的分割结果:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号