
计算机图形:三维观察之基本概念
该部分分2篇:1)三维观察之基本概念;2)三维观察之投影及变换。
三维观察概述
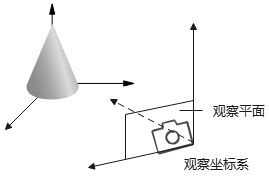
观察函数通过一组将对象的指定视图投影到显示设备表面上的过程,来处理对象的描述。三维观察一些处理,如裁剪子程序,与二维观察类似;但包含一些独有的任务,如投影子程序将场景变换到平面视图、识别可见部分、光照效果、表面特征等。
三维场景观察
为显示三维世界坐标场景,需:
- 先建立观察坐标系\(x_{view}y_{view}z_{view}\)。
- 然后将对象描述变换到观察坐标系,并投影到观察平面上。
投影
有多种投影方法:
-
平行投影(parallel projection):沿平行方向投影每个点,将实体描述投影到观察平面。
-
透视投影(perspective projection):沿会聚路径投影每个点,将实体描述投影到观察平面。类似于人眼/照相机镜头获得图像的原理,有近大远小的效果。
深度提示
深度提示技术用于说明深度信息,可用于鉴别观察方向显示的对象中哪个在前、哪个在后。
深度提示技术:
- 线框图中,按对象到观察位置的距离来改变线段的亮度,从而指示深度。
- 在感觉对象的强度上模拟雾气效果。
三维观察流水线
建立三维场景、将场景变换到设备坐标(屏幕坐标)的一般步骤:
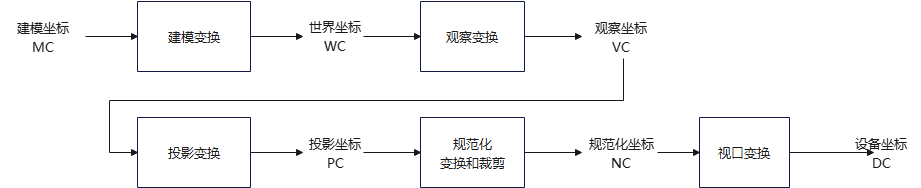
投影操作,将场景的观察坐标描述转换为投影平面的坐标位置。
投影变换后,建立三维裁剪区域,称为观察体(view volume),其形状、大小依赖于裁剪窗口的尺寸、投影方式和所选的观察方向的边界位置。
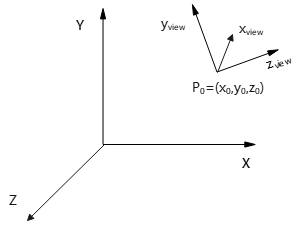
三维观察坐标系参数
观察坐标系是三维观察的重要环节。建立三维观察坐标系步骤:
- 在世界坐标系中选定一点\(P_0=(x_0,y_0,z_0)\)作为观察原点(观察坐标系原点),称为观察点(view point)或观察位置(viewing position)。观察点也称为视点(eye position)或照相机位置(camera position)。
- 指定决定\(y_{view}\)方向的观察向上向量(view-up-vector)V。
- 指定另2个坐标轴方向:\(x_{view},z_{view}\)。
建立右手观察坐标系示意图:
观察平面法向量N
观察方向\(\xrightarrow{}-z_{view}\xrightarrow{}N\).
观察方向通常沿\(-z_{view}\)方向,观察平面(view plane)也称投影平面(projection plane),一般假设观察平面与\(z_{view}\)轴垂直。而观察平面的方向(\(+z_{view}\)方向),定义为观察平面法向量(view plane normal vector)N。如下图:
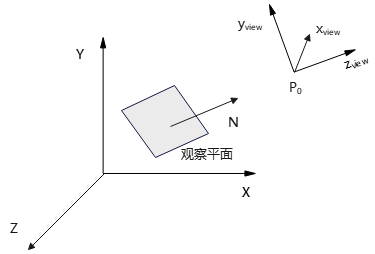
∵观察平面//\(x_{view}y_{view}\)平面(观察平面⊥\(z_{view}\)轴)
∴可用标量参数设定观察平面在\(z_{view}\)轴位置\(z_{vp}\)。
法向量N有多种指定方法:
1)从世界坐标系原点到某选定点的连线方向;
2)选定参考点\(P_{ref}\)到观察原点\(P_0\)的方向(注:OpenGL使用该方法);
3)方向角定义。
参考点\(P_{ref}\)称为场景中的注视点(look-at point),观察方向与N方向相反。
注意:法向量参考点/注视点用于求观察平面的法向量,不是投影参考点\(P_{prp}\),更不是观察原点。
观察向上向量V
观察向上向量\(V\times N\xrightarrow{}x_{view},x_{view}\times N\xrightarrow{}+y_{view}(v)\)
先选定与世界坐标系原点相关的一个位置来定义V,因此,V是从世界坐标系原点到选定点。
∵N代表\(z_{view}\)轴,而\(V⊥z_{view}\)
∴V⊥N
tips:V是与v,N共面的任意向量,只需确保V∦N,然后调整使其与N垂直。调整后为v。为方便,可选择V=(0,1,0),即//世界坐标系\(y_{w}\)轴。
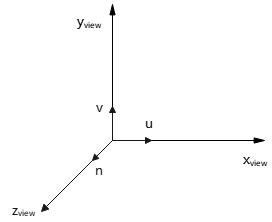
uvn观察坐标系
\(N\xrightarrow{}z_{view}\xrightarrow{}n, V\xrightarrow{}y_{view}\xrightarrow{}v, V\times N\xrightarrow{}x_{view}\xrightarrow{}u\)
UVN系统遵循右手规则,有
∵U⊥N、V
∴U可作为\(+x_{view}\)方向
单位轴向量计算:
u、v、n构成的坐标系,称为uvn观察坐标参考系统(uvn viewing-coordinate reference frame),如下图:
世界坐标系=>观察坐标系
如何将世界坐标系中对象描述,转换到观察坐标系中?
世界坐标系=>观察坐标系,对象的坐标变换分两步:
1)平移观察坐标系原点到世界坐标系原点;
2)旋转观察坐标系,让\(x_{view}, y_{view}, z_{view}\)轴对应到世界坐标系的\(x_w, y_w, z_w\)轴。
tips:坐标系的变换方向,与对象坐标的变换方向 相反。
步骤1,世界坐标系下\(P=(x_0,y_0,z_0)\)为观察坐标系原点,平移变换:
步骤2,
∵观察坐标系轴向量已知
∴可用观察坐标系的单位轴向量u、v、n来构造旋转矩阵
原理参见计算机图形:三维坐标系变换
旋转变换:
∴世界坐标系=>观察坐标系的复合变换矩阵:
变换矩阵\(M_{WC,VC}\)的平移因子(最后一列前3行),可看作单位轴向量\(u=(u_x,u_y,u_z)、v=(v_x,v_y,v_z)、n=(n_x,n_y,n_z)\)与向量\(P_0=(x_0,y_0,z_0)\)的点积:
因此,更简洁写法:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号