基本的二维几何变换
几何变换(geometric transformation):应用于对象几何描述,并改变其位置、方向、大小的操作。有时,也称为建模变换(modeling transformation)。
常用几何变换函数:平移、旋转、缩放。
二维平移
平移(translation):点坐标+位移量=>新坐标。平移是只移动对象,而不改变其形状的刚体变换。
二维平移:二维坐标下的平移,即平移距离tx, ty + 原始坐标(x, y) => 新坐标(x', y'),有:
\[\tag{1}
x^\prime = x+t_x, y^\prime = y+t_y
\]
一对平移距离(tx, ty)称为平移向量(translation vector)或位移向量(shift vector)。
用列向量表示坐标位置、平移向量:
\[\tag{2}
P=\begin{bmatrix}
x \\
y
\end{bmatrix},
P^\prime = \begin{bmatrix}
x^\prime \\
y^\prime
\end{bmatrix},
T=\begin{bmatrix}
t_x \\
t_y
\end{bmatrix}
\]
平移方程(1)可以用矩阵表示:
\[\tag{3}
P^\prime = P + T
\]
二维旋转
可指定一个旋转轴(rotation axis)和一个旋转角度(rotation angle)进行一次旋转变换(rotation translation)。
旋转是一种不变形地移动对象的刚体变换。将对象的所有顶点旋转后,对象的所有点就会发生旋转。
对象在xy平面的二维旋转,可看做是绕与z轴平行的旋转轴旋转。记旋转角θ,旋转点(x, y),对象(三角形)绕选择点旋转如下图所示:
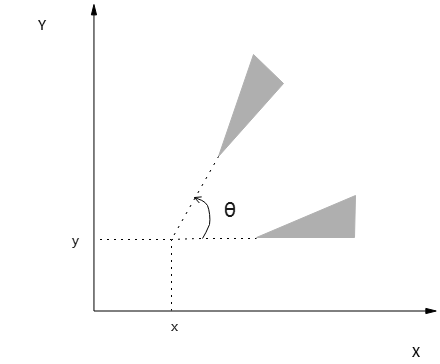
基准点(旋转点)是旋转轴与xy平面交点;正角度θ定义为绕基准点的逆时针旋转,负角度是顺时针旋转。
先确定基准点为原点时,点位置P进行旋转的变换方程。
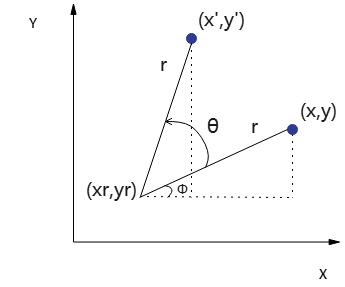
下图是点(x,y)绕原点逆时针旋转角Θ后,得到新位置(x',y')的示意图:

其中,r表示点到原点距离,Φ是点对x轴角位移。
用极坐标表示旋转前点坐标:
\[\tag{4}
x=r\cos Φ, y=r\sin Φ
\]
旋转后点坐标:
\[\tag{5}
\begin{aligned}
x^\prime = r\cos (Φ+θ)=r\cos Φ \cos θ - r\sin Φ\sin θ \\
y^\prime = r\sin (Φ+θ) = r\cosΦ \sin θ + r\sin Φ \cos θ
\end{aligned}
\]
由(4)(5)可得,
\[\tag{6}
\begin{aligned}
x^\prime = x\cos θ - ysin θ \\
y^\prime = x \sin θ + y \cos θ
\end{aligned}
\]
用列向量表示坐标位置,那么旋转方程可写成矩阵形式:
\[P^\prime = {R \cdot P}
\]
其中,旋转矩阵:
\[R=\begin{bmatrix}
\cos θ & -\sin θ
\\
\sin θ & \cos θ
\end{bmatrix}
\]
点(x,y)绕任意点\((x_r, y_r)\)旋转后,得到新位置\((x^\prime, y^\prime)\):
\[\tag{7}
\begin{aligned}
x^\prime = x_r + (x-x_r)\cos θ - (y-y_r)\sin θ \\
y^\prime = y_r + (x-x_r)\sin θ + (y-y_r)\cos θ
\end{aligned}
\]
点绕任意点旋转示意图:
二维缩放
缩放(scaling)变换改变一个对象的大小。
简单的二维缩放:将缩放系数(scaling factor)\(s_x, s_y\)与对象坐标位置(x,y)相乘。
\[\tag{8}
x^\prime = x \cdot s_x, y^\prime = y \cdot s_y
\]
缩放系数\(s_x, s_y\)分别表示x方向、y方向对对象缩放。写成矩阵形式:
\[\tag{9}
\begin{bmatrix}
x^\prime \\
y^\prime
\end{bmatrix}
=\begin{bmatrix}
s_x & 0 \\
0 & s_y
\end{bmatrix}
\cdot \begin{bmatrix}
x \\
y
\end{bmatrix}
\]
\[\tag{10}
P^\prime=S\cdot P
\]
缩放系数\(s_x, s_y\)可以是任何>0的值。<1 表示缩小,>1表示放大,=1表示不变。当\(s_x, s_y\)相等时,表示一致缩放(uniform scaling);不相等时,表示差值缩放(differential scaling)。
有些系统也支持<0的缩放系数,表示坐标轴反射。
缩放过程可以选择一个位置不变的点,称为固定点(fixed point),用于控制缩放后对象的位置。固定点\((x_f, y_f)\)可以是对象的中点或其他任何位置。对于顶点(x,y),缩放后位置\((x^\prime, y^\prime)\):
\[\tag{11}
\begin{aligned}
x^\prime - x_f = (x-x_f)s_x, \\
y^\prime - y_f=(y-y_f)s_y
\end{aligned}
\]
=>
\[\tag{12}
\begin{aligned}
x^\prime = x\cdot s_x + x_f(1-s_x) \\
y^\prime = y\cdot s_y + y_f(1-s_y)
\end{aligned}
\]
而\(x_f(1-s_x), y_f(1-s_y)\)对于对象顶点是常数。
固定点\((x_f, y_f)\),可以将点的缩放写成向量形式:
\[\tag{13}
P^\prime = S\cdot P + C \\
S = \begin{bmatrix}
s_x & 0 \\
0 & s_y \\
\end{bmatrix},
P=\begin{bmatrix}
x \\
y
\end{bmatrix},
C=\begin{bmatrix}
x_f(1-s_x) \\
y_f(1-s_y)
\end{bmatrix}
\]
矩阵表示、齐次坐标
综合旋转变换、放缩变换,式(13)可写成:
\[\tag{14}
P^\prime = M_1\cdot P + M_2
\]
\(P^\prime, P\)表示列向量(2x1矩阵),分别表示变换后坐标、变换前坐标;\(M_1\)是包含乘法系数2x2的矩阵,包含旋转或放缩系数;\(M_2\)是2x1列向量,包含平移参数。
变换操作能不能写成矩阵乘法的形式(去掉加法)?
答案是可以,这就需要用齐次坐标。
齐次坐标
齐次坐标(homogeneous coordinate)定义是将一个原本n维的向量用n+1维向量表示。
如果将式(14)中2x2矩阵扩充为3x3,就能把2维几何变换的乘法、平移项组合成单一矩阵表示。
2维位置\((x,y)=>(x_h,y_h,h)\),我们称后者(3维)是前者(2维)的齐次坐标,齐次参数(homogeneous parameter)h是一个非零值。有
\[\tag{15}
x={x_h\over h}, y={y_h\over h}
\]
h可以是任意非零值,通常取1。这样,二维齐次坐标可写为:\((x,y,1)^{-1}\)
接下来用齐次坐标改写二维平移、旋转、缩放变换。
矩阵表示
\[\tag{16}
\begin{bmatrix}
x^\prime \\
y^\prime \\
1
\end{bmatrix}
=\begin{bmatrix}
1 & 0 & t_x \\
0 & 1 & t_y \\
0 & 0 & 1
\end{bmatrix}
\cdot \begin{bmatrix}
x \\
y \\
1
\end{bmatrix}
\]
简写:
\[\tag{17}
P^\prime = T(t_x, t_y)\cdot P
\]
3x3矩阵\(T(t_x,t_y)\):平移矩阵,简称T。
以原点为旋转点的二维旋转:
\[\tag{18}
\begin{bmatrix}
x^\prime \\
y^\prime \\
1
\end{bmatrix}
=\begin{bmatrix}
\cos \theta & -\sin \theta & 0 \\
\sin \theta & \cos \theta & 0 \\
0 & 0 & 1
\end{bmatrix}
\cdot
\begin{bmatrix}
x \\
y \\
1
\end{bmatrix}
\]
简写:
\[\tag{19}
P^\prime = R(\theta) \cdot P
\]
3x3矩阵\(R(\theta)\):旋转矩阵,简称R。
以原点为固定点的二维缩放:
\[\tag{20}
\begin{bmatrix}
x^\prime \\
y^\prime \\
1
\end{bmatrix}
=\begin{bmatrix}
s_x & 0 & 0 \\
0 & s_y & 0 \\
0 & 0 & 1
\end{bmatrix}
\cdot
\begin{bmatrix}
x \\
y \\
1
\end{bmatrix}
\]
简写:
\[\tag{21}
P^\prime=S(s_x,s_y)\cdot P
\]
3x3矩阵\(S(s_x,s_y)\):缩放矩阵,简称S。
逆变换
如果想通过变换后坐标得到变换前的坐标,就需要用到逆变换。逆矩阵的特点:与原矩阵相成,得到单位矩阵。
\[\tag{22}
T^{-1}=\begin{bmatrix}
1 & 0 & -t_x \\
0 & 1 & -t_y \\
0 & 0 & 1
\end{bmatrix}
\]
\[\tag{23}
R^{-1}=\begin{bmatrix}
\cos \theta & \sin \theta & 0 \\
-\sin \theta & \cos \theta & 0 \\
0 & 0 & 1
\end{bmatrix}
\]
\[\tag{24}
S^{-1}=\begin{bmatrix}
{1\over s_x} & 0 & 0 \\
0 & {1\over s_y} & 0 \\
0 & 0 & 1
\end{bmatrix}
\]
复合变换
可将任意的变换序列组成复合变换矩阵(composite transformation matrix),用矩阵乘积表示。而变换矩阵的乘积,称为矩阵的合并(concatenation)或复合(composition)。
比如,将位置相同的点进行多次变换,用矩阵乘法的结合律和合并成一个:
\[\tag{25}
\begin{aligned}
P^\prime &= M_2\cdot M_1\cdot P \\
&= M\cdot P
\end{aligned}
\]
复合二维平移
结论:2个连续平移是相加的。
证明:
假设2个连续的平移向量\((t_{1x}, t_{1y}), (t_{2x}, t_{2y})\)用于坐标位置P,那么变换位置\(P^\prime\):
\[\tag{26}
\begin{aligned}
P^\prime &= T(t_{2x}, t_{2y})\cdot \{T(t_{1x},t_{1y})\cdot P\} \\
&= \{T(t_{2x},t_{2y})\cdot T(t_{1x}, t_{1y})\}\cdot P
\end{aligned}
\]
\(P, P^\prime\)为三元素、齐次坐标的列向量。
复合平移矩阵:
\[\tag{27}
\begin{aligned}
T(t_{2x},t_{2y})\cdot T(t_{1x}, t_{1y}) =T(t_{1x}+t_{2x}, t_{1y}+t_{2y}) \\
<=>
\begin{bmatrix}
1 & 0 & t_{2x} \\
0 & 1 & t_{2y} \\
0 & 0 & 1
\end{bmatrix}
\cdot
\begin{bmatrix}
1 & 0 & t_{1x} \\
0 & 1 & t_{1y} \\
0 & 0 & 1
\end{bmatrix}
=\begin{bmatrix}
1 & 0 & t_{1x}+t_{2x} \\
0 & 1 & t_{1y}+t_{2y} \\
0 & 0 & 1
\end{bmatrix}
\end{aligned}
\]
复合二维旋转
结论:2个连续旋转是相加的。
证明:
假设2个连续旋转角度\(θ_1, θ_2\)(逆时针),则位置P变换方程为:
\[\tag{28}
\begin{aligned}
P^\prime &= R(\theta_2)\cdot \{ R(\theta_1) \cdot P \} \\
&= \{ R(\theta_2)\cdot R(\theta_1)\} \cdot P
\end{aligned}
\]
复合旋转矩阵:
\[\begin{aligned}
R(\theta_2)\cdot R(\theta_1) &= R(\theta_1+\theta_2) \\
<=>
\begin{bmatrix}
\cos \theta_2 & -\sin \theta_2 & 0 \\
\sin \theta_2 & \cos \theta_2 & 0 \\
0 & 0 & 1
\end{bmatrix}
\cdot
\begin{bmatrix}
\cos \theta_1 & -\sin \theta_1 & 0 \\
\sin \theta_1 & \cos \theta_1 & 0 \\
0 & 0 & 1
\end{bmatrix}
&=\begin{bmatrix}
\cos (\theta_2+\theta_1) & -\sin (\theta_2 + \theta_1 ) & 0 \\
\sin (\theta_2 +\theta_1) & \cos (\theta_2 + \theta_1) & 0 \\
0 & 0 & 1
\end{bmatrix}
\end{aligned}
\]
复合二维缩放
结论:2个连续缩放是相乘的。
证明:
\[\tag{29}
\begin{aligned}
S(s_{2x}, s_{2y})\cdot S(s_{1x},s_{1y}) &= S(s_{1x}\cdot s_{2x}, s_{1y}\cdot s_{2y}) \\
<=> \begin{bmatrix}
s_{2x} & 0 & 0 \\
0 & s_{2y} & 0 \\
0 & 0 & 1
\end{bmatrix}
\cdot \begin{bmatrix}
s_{1x} & 0 & 0 \\
0 & s_{1y} & 0 \\
0 & 0 & 1
\end{bmatrix}
&= \begin{bmatrix}
s_{1x}\cdot s_{2x} & 0 & 0 \\
0 & s_{1y}\cdot s_{2y} & 0 \\
0 & 0 & 1
\end{bmatrix}
\end{aligned}
\]
通用二维基准点旋转
有的图形软件包只提供绕坐标原点的旋转函数,我们可通过平移-旋转-平移操作,实现绕任意基准点\((x_r,y_r)\)旋转。步骤如下:
- 平移对象,让基准点移动到坐标原点;
- 绕坐标原点旋转;
- 平移对象,使基准点回原来的位置。
用如下变换矩阵表示:
\[\tag{30}
\begin{aligned}
T(x_r, y_r)\cdot R(\theta)\cdot T(-x_r,-y_r) &= R(x_r,y_r,\theta) \\
=> \begin{bmatrix}
1 & 0 & x_r \\
0 & 1 & y_r \\
0 & 0 & 1
\end{bmatrix}
\cdot \begin{bmatrix}
\cos \theta & -\sin \theta & 0 \\
\sin \theta & \cos \theta & 0 \\
0 & 0 & 1
\end{bmatrix}
\cdot \begin{bmatrix}
1 & 0 & -x_r \\
0 & 1 & -y_r \\
0 & 0 & 1
\end{bmatrix}
&=\begin{bmatrix}
\cos \theta & -\sin \theta & x_r(1-\cos \theta)+y_r\sin \theta \\
\sin \theta & \cos \theta & y_r(1-\cos \theta)-x_r\sin \theta \\
0 & 0 & 1
\end{bmatrix}
\end{aligned}
\]
通用二维定向缩放
\((s_x,s_y)\)是沿着x、y方向缩放对象。如果想沿着其他方向缩放对象,如何进行?
可以先将缩放方向旋转到坐标轴,然后缩放,最后旋转回原来的方向。
设\(s_1, s_2\)是与坐标轴成θ角的2个垂直方向,定向缩放的复合矩阵:
\[\tag{31}
R^{-1}(\theta)\cdot S(s_1,s_2)\cdot R(\theta)=\begin{bmatrix}
s_1\cos^2 \theta + s_2\sin^2 \theta & (s_2-s_1)\cos \theta \sin \theta & 0 \\
(s_2-s_1)\cos \theta \sin \theta & s_1\sin^2 \theta+s_2\cos^2 \theta & 0 \\
0 & 0 & 1
\end{bmatrix}
\]
二维刚体变换
如果一个变换矩阵只包含平移、旋转,则为刚体变换矩阵(rigid-body transformation matrix)。一般形式:
\[\tag{32}
\begin{bmatrix}
r_{xx} & r_{xy} & tr_x \\
r_{yx} & r_{yy} & tr_y \\
0 & 0 & 1
\end{bmatrix}
\]
其中,4个\(r_{jk}\)是多重旋转项,\(tr_x, tr_y\)是平移项。
坐标位置的刚体变化,也称刚体运动(rigid-motion)变换。变换后,坐标位置间所有角度和距离都不变。矩阵(32)左上角2x2矩阵是一个正交矩阵(若\(AA^T=A^TA=E\),则A为正交矩阵),有:
\[\tag{33}
r_{xx}^2+r_{xy}^2=r_{yx}^2+r_{yy}^2=1 \\
r_{xx}r_{xy}+r_{yx}r_{yy}=0
\]
说明2个行向量\((r_{xx}, r_{xy}), (r_{yx}, r_{yy})\)是单位正交向量组(模为1,相互垂直,点积为0)。
可以这将2个正交向量组旋转到x、y轴位置(列向量形式):
- 将\((r_{xx},r_{xy})\)旋转到x轴
\[\tag{34}
\begin{bmatrix}
r_{xx} & r_{xy} & 0 \\
r_{yx} & r_{yy} & 0 \\
0 & 0 & 1
\end{bmatrix}
\cdot \begin{bmatrix}
r_{xx} \\
r_{xy} \\
1
\end{bmatrix}
=\begin{bmatrix}
1 \\
0 \\
1
\end{bmatrix}
\]
- 将\((r_{yx}, r_{yy})\)旋转到y轴
\[\tag{35}
\begin{bmatrix}
r_{xx} & r_{yy} & 0 \\
r_{yx} & r_{yx} & 0 \\
0 & 0 & 1
\end{bmatrix}
\cdot \begin{bmatrix}
r_{yx} \\
r_{yy} \\
1
\end{bmatrix}
=\begin{bmatrix}
1 \\
0 \\
1
\end{bmatrix}
\]
例如,将对象进行刚体变换:对于基准点(xr, yr)旋转θ角,然后平移。复合变换矩阵:
\[\tag{36}
\begin{aligned}
T(t_x,t_y)\cdot R(x_r,y_r,\theta) &= T(t_x,t_y)\cdot \{T(x_r,y_r,\theta)\cdot R(0,0,\theta)\cdot T(-x_r,-x_y)\} \\
&= \begin{bmatrix}
\cos \theta & -\sin \theta & x_r(1-\cos \theta) + y_r\sin \theta + t_x \\
\sin \theta & \cos \theta & y_r(1-\cos \theta) - x_r\sin \theta + t_y \\
0 & 0 & 1
\end{bmatrix}
\end{aligned}
\]
OpenGL几何变换函数
OpenGL实现的几何变换函数,默认适用于3维变换(4x4矩阵),2维空间可固定z值(如z=0)。
基本OpenGL几何变换
OpenGL内部使用复合矩阵支持变换,从而导致变换可累积。
// *表示后缀码, 包含数据类型信息, e.g. f-float, d-double
glTranslate*(tx, ty, tz);
调用该函数后,可用于对之后定义的对象位置进行平移变换。
// 将随后定义的对象坐标x方向平移25个单位,y方向平移-10个单位
glTranslaterf(25.0, -10.0, 0.0);
// 向量(vx,vy,vz)是旋转的基准方向
// theta 是逆时针旋转角度, 单位: 度
glRotate*(theta, vx, vy, vz);
// sx, sy, sz为xyz轴方向缩放系数
glScale*(sx, sy, sz);
缩放系数为0会引起错误。
OpenGL矩阵操作
glMatrixMode(GL_PROJECTION)设定投影模式(projection mode),指定将用于投影变换的矩阵。变换确定怎样将一个场景投影到屏幕上。
glMatrixMode(GL_MODELVIEW)设定几何变换矩阵,此时将该矩阵看做建模观察矩阵(modelview matrix),用于存储和组合几何变换,几何变换与向观察坐标系的变换组合。该语句指定一个4x4建模观察矩阵为当前矩阵(current matrix)。在进行几何变换前,调用该语句。GL_MODELVIEW是默认参数。
glMatrixMode还支持2个模式:
- 纹理模式(texture mode),用于映射表面的纹理图案;
- 颜色模式(color mode),用于从一个颜色模型转换到另一个。
当前矩阵在进行计算前,需要进行初始化,通常赋值为单位矩阵(Identity Matrix):
glLoadIdentity();
也可以赋值为其他值:
// 后缀码常用f, d
// elements16 指定一个单下标、16元素的浮点数组
glLoadMatrix*(elements16);
e.g. 下面程序将初始化建模观察模式下的当前矩阵为指定数组elems值:
glMatrixMode(GL_MODELVIEW);
GLfloat elems[16];
GLint k;
for (k = 0; k < 16; k++) {
elems[k] = (float)(k);
}
glLoadMatrixf(elems);
结果:
M=[
0.0 4.0 8.0 12.0
1.0 5.0 9.0 13.0
2.0 6.0 10.0 14.0
3.0 7.0 11.0 15.0
]
将指定矩阵与当前矩阵进行矩阵乘法:
// 后缀码常用f,d
// otherElements16 16元素、单下标数组(一维数组)
glMultMatrix*(otherElements16);
用法:
glMatrixMode(GL_MODELVIEW);
glLoadIdentity(); // 当前矩阵M为单位阵4x4 E
glMultMatrixf(elemsM2); // M = E*M2
glMultMatrixf(elemsM1); // M = M*M1

 浙公网安备 33010602011771号
浙公网安备 33010602011771号