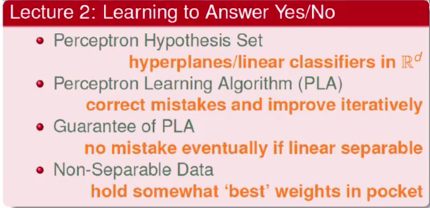
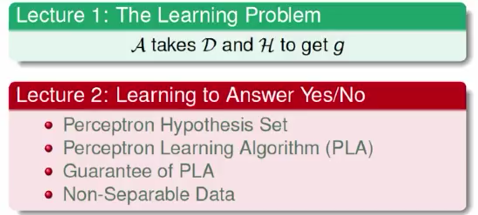
Lecture 2: Learning to Answer Yes/no
Roadmap
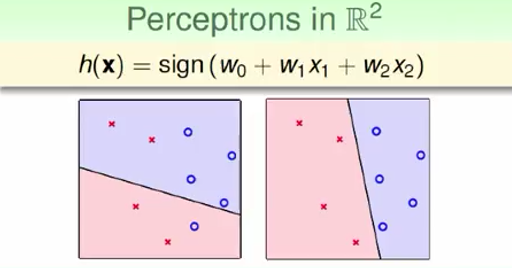
1.感知器假设集
假设空间 \(H\) 到底是什么样子?
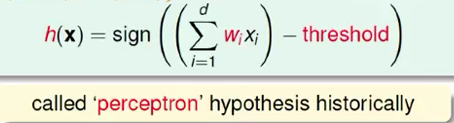
\(H\)中的一个\(h\),\(h\)由\(\mathbf{W}\) 和 阈值决定(阈值可以作为\(w_0\))
举个具体的栗子:
2.感知器学习算法(Perceptron Learning Algorithm, PLA)
如何选择 \(g\) ?
\(H\) = all possible perceptrons, \(g\) = ? \(\approx f\) => 直接找到与 \(f\) 相近的 \(g\) 很困难
idea:随机从一个 \(g_0\) 出发,每一轮(\(t\))找到一个犯错的点,逐步修正\(g_t\)
具体算法:(用权重向量 \(\mathbf{W_0}\) 表示 \(g_0\))
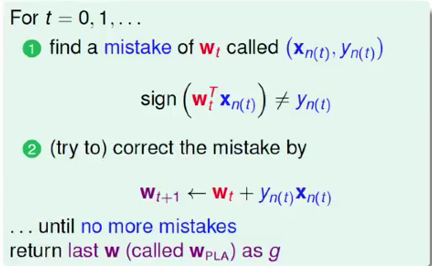
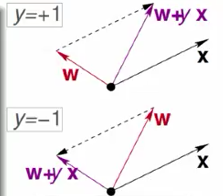
修正错误 \(\mathbf{W_{t+1}} = \mathbf{W_t} + y_nx_n\) ( (\(x_n, y_n\)) 是犯错误的点,\(\mathbf{W}\) 是分类线的法向量)
3.PLA的保证(可收敛)
假设数据线性可分,PLA何时停止更新?
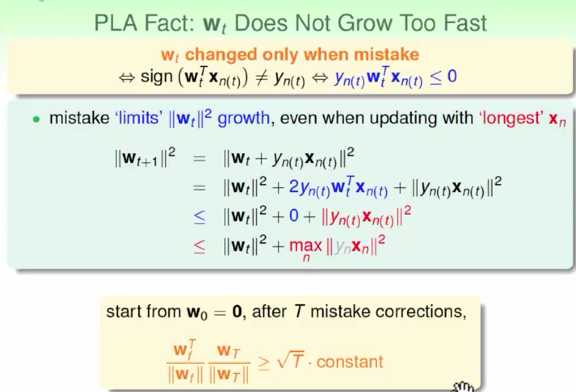
\(\mathbf{W_f}\) 是理想状态下的模型
\(\mathbf{W_f W_t}\) 越大,两个向量越接近

如果每次只随机寻找犯错误的点,\(\mathbf{W_t}\)的更新会很慢,要在犯错的点中找到 \(||x_n||^2\)最大的点
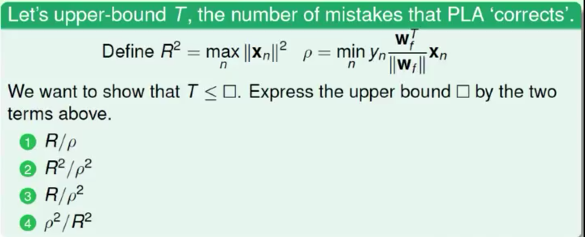
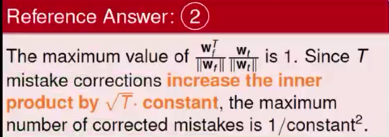
PLA更新多少次会停下?T的上界是多少?
T <= 1/ \({constant^2}\) \({ constant^2 }\) = \({R^2}\) / \({\rho^2}\)
4.线性不可分的数据
如果数据线性不可分呢?
上述的保证假设数据是线性可分的,但是不一定,另外, \({\rho}\)是由\(\mathbf{W_f}\) 得出,\(\mathbf{W_f}\) 未知。
数据中可能存在少量杂讯(noise),我们尝试找一条犯错最小的线呢?
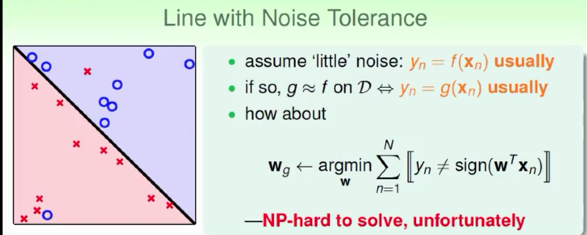
找到最完美的线,NP-hard问题。尝试找到一条差不多的线
Pocket 算法
每次找到一条新的线和当前pocket中的线进行比较,选择犯错更少的那条放入pokect中。
迭代足够多次后,停下。
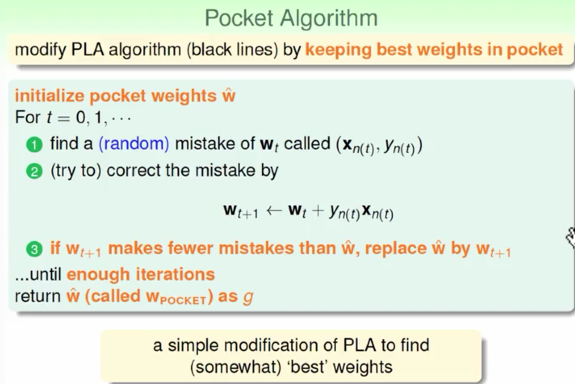
PS:pocket比PLA要慢,pokect需要存储每次选择的线,并且每次需要检查出哪一条线更好。
Summary