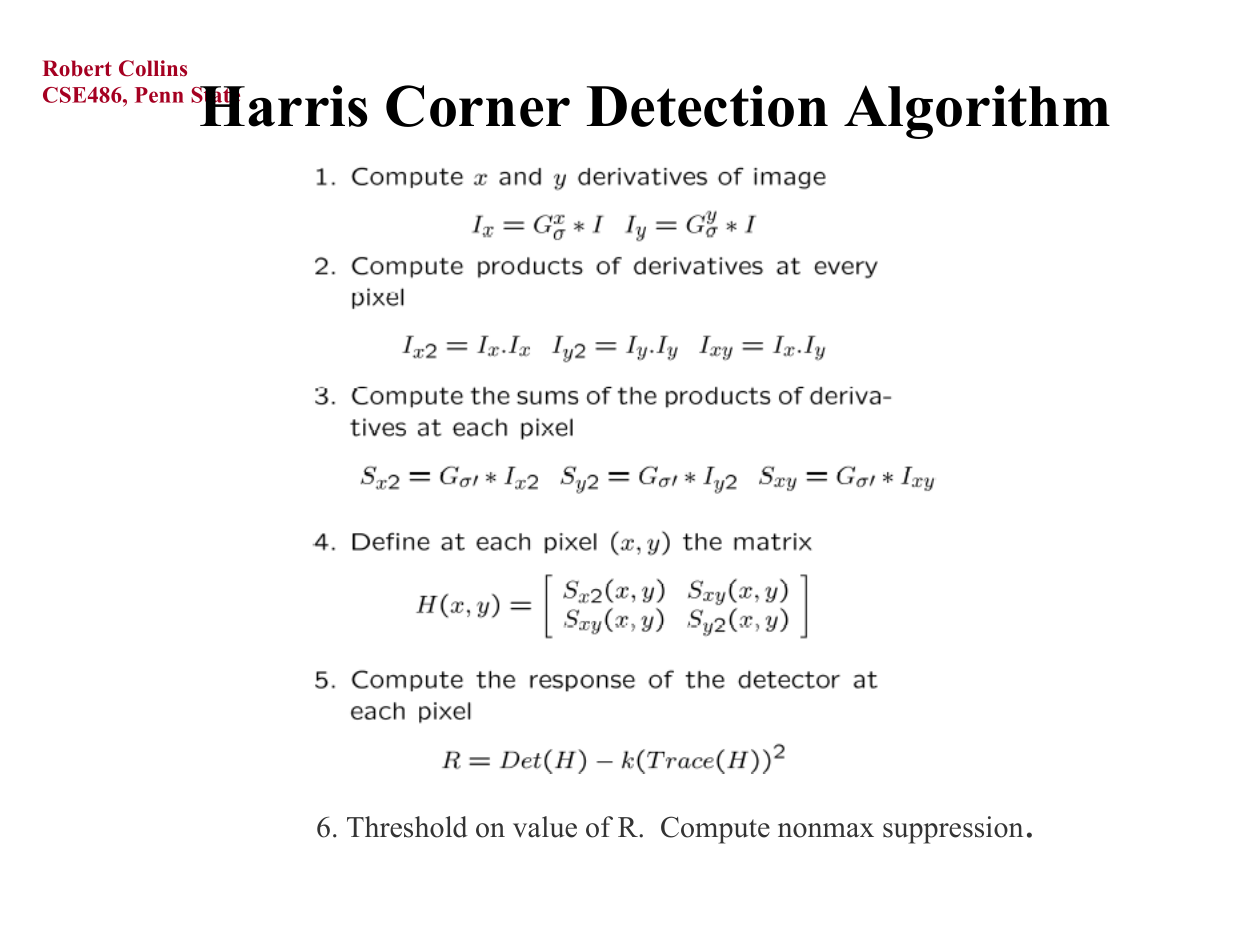
算法
Harris Corner Detector 的原理不讲,详见谭平老师的计算机视觉P9,觉得讲得不错,也可以从百度网盘下载该算法的文档 提取码: dixx。算法如下:
结果如下
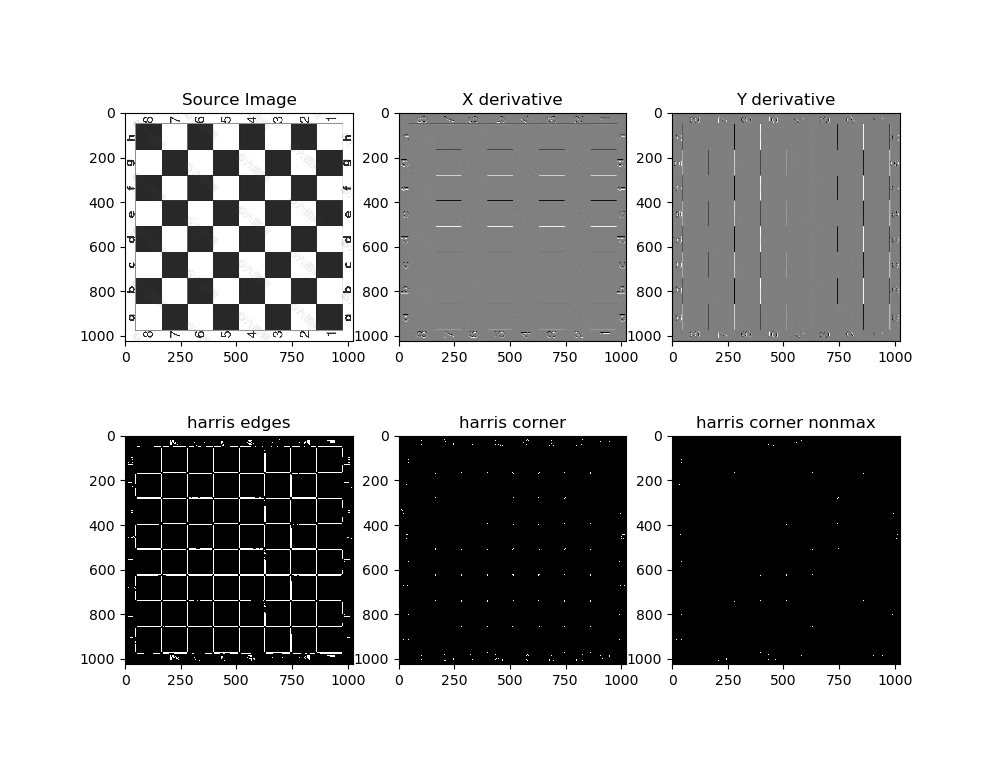
第一行从左到右分别是:原图,水平方向梯度图(Gaussian梯度算子),竖直方向梯度图(Gaussian梯度算子)
第二行从左到右分别是:Harris算法检测到的边缘,Harris检测到的角点,nonmax后检测到的角点(有的地方只有一个像素看不清)
代码
import numpy as np
import matplotlib.pyplot as plt
import cv2
def scale01(img):
""" 把图像缩放到0-1之间,便于plt显示 """
return (img - np.min(img))/(np.max(img) - np.min(img))
def nonmax_suppression(I):
# 对I的每一列,如果某个像素左右与之相等,则只取一个像素点
for x in range(I.shape[0]):
for y in range(1,I.shape[1]-1):
if I[x,y-1] >= I[x,y] or I[x,y+1] >= I[x,y]:
I[x,y] = 0.0
return I
# 读取图片并放缩到0-1之间,imread 的参数 0 表示转换成灰度图
I = cv2.imread("D:/picture/test/qipan2.jpg", 0)
I = np.array(I, dtype=np.float32) / 255
# 对应算法第 1 步中的 Gx Gy 两个梯度滤波器
GxFilter = np.array([[-1,-3,-1],[0,0,0],[1,3,1]], dtype=np.float32)
GyFilter = np.array([[-1,0,1],[-3,0,3],[-1,0,1]], dtype=np.float32)
# filter2D 参数 -1 表示保持图像 dtype 不变
Ix = cv2.filter2D(I, -1, GxFilter)
Iy = cv2.filter2D(I, -1, GyFilter)
Ix2 = Ix * Ix
Iy2 = Iy * Iy
Ixy = Ix * Iy
# Gaussian 7x7
ksize = (7,7)
Sx2 = cv2.GaussianBlur(Ix2, ksize, 0)
Sy2 = cv2.GaussianBlur(Iy2, ksize, 0)
Sxy = cv2.GaussianBlur(Ixy, ksize, 0)
# 建议 k=0.04~0.06
k = 0.05
# IR 图像对应的 R 值,通过逐像素计算
IR = np.zeros_like(I)
for x in range(I.shape[0]):
for y in range(I.shape[1]):
H = np.array([
[Sx2[x,y], Sxy[x,y]],
[Sxy[x,y], Sy2[x,y]]
])
IR[x,y] = np.linalg.det(H) - k* H.trace()
# IR 的最小值,平均值,中位数,最大值
print(np.min(IR), np.mean(IR), np.percentile(IR, 50), np.max(IR))
# IR 较小的是边,较大的是角点,不大不小的什么都不是
# 用分位数来确定边(小于10%)和角点(大于90%), 根据整体 IR 的大小决定的
edges = np.array(IR<np.percentile(IR, 10), dtype=np.float32)
points = np.array(IR>np.percentile(IR, 90), dtype=np.float32)
# 画图
fig, axes = plt.subplots(2,3,figsize=(10,8))
plt.axis('off')
axes[0,0].imshow(I, cmap='gray')
axes[0,0].set_title("Source Image")
axes[0,1].imshow(scale01(Ix), cmap='gray')
axes[0,1].set_title("X derivative")
axes[0,2].imshow(scale01(Iy), cmap='gray')
axes[0,2].set_title("Y derivative")
axes[1,0].imshow(edges, cmap='gray')
axes[1,0].set_title("harris edges")
axes[1,1].imshow(points, cmap='gray')
axes[1,1].set_title("harris corner")
axes[1,2].imshow(nonmax_suppression(points), cmap='gray')
axes[1,2].set_title("harris corner nonmax")
plt.show()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号