ROS学习之URDF
URDF
为了制作我们的模拟器,首先我们得了解下什么是URDF
什么是URDF? Unified Robot Description Format——统一机器人描述格式。总觉得这和Sensor支持才是ROS的精华所在,通信frameworks的并不见得出彩。
可能大部分读者都像我这样穷<bi~背景声>没钱买ROS支持的机器人,不过ROS还是很Nice的考虑到了这一群体,提供了模拟器支持。(明明是为了更快速的软件开发,喂!)
本想从ROS网站的培训教程开始http://wiki.ros.org/urdf/Tutorials开始的,不过本着实践为本的目的,我们还是以《Learning ROS for Robostic Programming》为基础吧。
参考文献
1. ROS urdf教程:http://wiki.ros.org/urdf/Tutorials
2. 《Learning ROS for Robostic Programming》
准备工作
安装urdf_tutorial包
- sudo apt-get install ros-hydro-urdf-tutorial
执行
- rosrun rviz rviz
当然,没有运行roscore你的rviz也无法启动。不过如果错误显示你的rviz找不到执行文件的话,请参照http://wiki.ros.org/rviz
URDF基本语法
统一机器人描述格式URDF,其实就是为了能够抽象描述一个机器人的硬件。而且URDF是基于XML的,所以阅读起来应该非常容易。
笔者以为要理解URDF用自顶向下的方式更快。即从为了解决一个怎样的问题开始。在这里我们先用一个简单场景熟悉一下会用到的工具。
不得不说小车是最简单实用的机器人, 一个车身加四个轮子就组成了最基本的小车结构,而且具备一定载重能力的小车也不会太贵。
见如下图片。
(图一)
第一版
在URDF语言中,机器人都会由各个部件(Link)通过关节(Joint)连接而成。而这里的关键就是描述部件和关节之间的关系。
在这个简单的小车模型中,一共有5个部件: 车身 + 4个轮子。 4个关节: 每个轮子一个。
于是,我们得到了最初了URDF版本 01_car_skeleton.urdf
- <robot name="test_robot">
- <link name="base_link" />
- <link name="wheel_1" />
- <link name="wheel_2" />
- <link name="wheel_3" />
- <link name="wheel_4" />
- <joint name="joint_base_wheel1" type="fixed">
- <parent link="base_link"/>
- <child link="wheel_1"/>
- </joint>
- <joint name="joint_base_wheel2" type="fixed">
- <parent link="base_link"/>
- <child link="wheel_2"/>
- </joint>
- <joint name="joint_base_wheel3" type="fixed">
- <parent link="base_link"/>
- <child link="wheel_3"/>
- </joint>
- <joint name="joint_base_wheel4" type="fixed">
- <parent link="base_link"/>
- <child link="wheel_4"/>
- </joint>
- </robot>
很简单对吧?
用<link> tag描述各个部件,<joint> tag描述各个关节。用<parent>和<child>描述关节连接的部件。
只要描述了Link和Joint之间的关系,我们很容易就能构建机器人的框架。
我们可以用如下命令来检查urdf文件是否有语法问题。
- check_urdf 01_skeleton.urdf
只要得到如下结果就表明语法没问题。
- robot name is: test_robot
- ---------- Successfully Parsed XML ---------------
- root Link: base_link has 4 child(ren)
- child(1): wheel_1
- child(2): wheel_2
- child(3): wheel_3
- child(4): wheel_4
但请注意这虽然描述了各个部件之间的关系,但仍是一个不完整的URDF,无法在模拟器中显示。
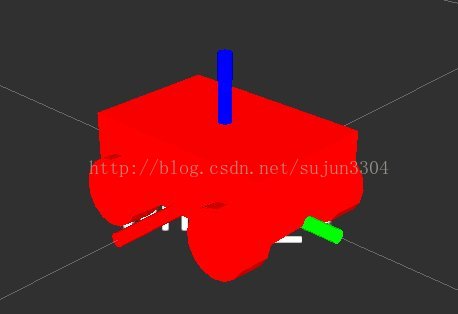
第二版
<visual>tag用来描述模块的视觉效果。
<geometry>tag 用来描述模块的形状和大小。
<origin>tag用来描述模块的位置。
加上模块大小之后的小车文件如下所示。02_visual.urdf
- <robot name="test_robot">
- <link name="base_link">
- <visual>
- <geometry>
- <box size="0.2 .3 .1"/>
- </geometry>
- <origin rpy="0 0 0" xyz="0 0 0.05"/>
- </visual>
- </link>
- <link name="wheel_1">
- <visual>
- <geometry>
- <cylinder length="0.05" radius="0.05"/>
- </geometry>
- <origin rpy="0 1.5 0" xyz="0.1 0.1 0"/>
- </visual>
- </link>
- <link name="wheel_2">
- <visual>
- <geometry>
- <cylinder length="0.05" radius="0.05"/>
- </geometry>
- <origin rpy="0 1.5 0" xyz="-0.1 0.1 0"/>
- </visual>
- </link>
- <link name="wheel_3">
- <visual>
- <geometry>
- <cylinder length="0.05" radius="0.05"/>
- </geometry>
- <origin rpy="0 1.5 0" xyz="0.1 -0.1 0"/>
- </visual>
- </link>
- <link name="wheel_4">
- <visual>
- <geometry>
- <cylinder length="0.05" radius="0.05"/>
- </geometry>
- <origin rpy="0 1.5 0" xyz="-0.1 -0.1 0"/>
- </visual>
- </link>
- <joint name="joint_base_wheel1" type="fixed">
- <parent link="base_link"/>
- <child link="wheel_1"/>
- </joint>
- <joint name="joint_base_wheel2" type="fixed">
- <parent link="base_link"/>
- <child link="wheel_2"/>
- </joint>
- <joint name="joint_base_wheel3" type="fixed">
- <parent link="base_link"/>
- <child link="wheel_3"/>
- </joint>
- <joint name="joint_base_wheel4" type="fixed">
- <parent link="base_link"/>
- <child link="wheel_4"/>
- </joint>
- </robot>
现在通过如下命令,你就通过rviz查看你的小车模型啦。
- roslaunch urdf_tutorial display.launch model:=02_visual.urdf
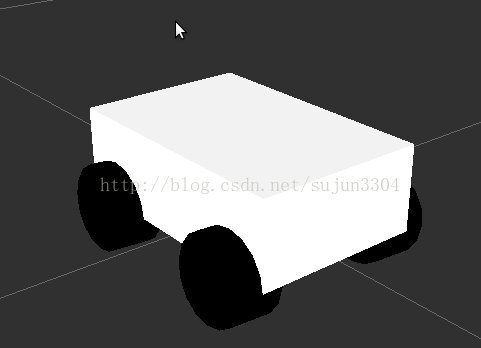
第三步: 上色
Mmm,我们的小车就快完成了,但全是红色总觉得怪怪的而且很难辨认。
不过上色同样很简单。使用<material> tag并且设置<color> tag
我们得到第三个版本:03_color.urdf
- <robot name="test_robot">
- <link name="base_link">
- <visual>
- <geometry>
- <box size="0.2 .3 .1"/>
- </geometry>
- <origin rpy="0 0 0" xyz="0 0 0.05"/>
- <material name="white">
- <color rgba="1 1 1 1"/>
- </material>
- </visual>
- </link>
- <link name="wheel_1">
- <visual>
- <geometry>
- <cylinder length="0.05" radius="0.05"/>
- </geometry>
- <origin rpy="0 1.5 0" xyz="0.1 0.1 0"/>
- <material name="black">
- <color rgba="0 0 0 1"/>
- </material>
- </visual>
- </link>
- <link name="wheel_2">
- <visual>
- <geometry>
- <cylinder length="0.05" radius="0.05"/>
- </geometry>
- <origin rpy="0 1.5 0" xyz="-0.1 0.1 0"/>
- <material name="black"/>
- </visual>
- </link>
- <link name="wheel_3">
- <visual>
- <geometry>
- <cylinder length="0.05" radius="0.05"/>
- </geometry>
- <origin rpy="0 1.5 0" xyz="0.1 -0.1 0"/>
- <material name="black"/>
- </visual>
- </link>
- <link name="wheel_4">
- <visual>
- <geometry>
- <cylinder length="0.05" radius="0.05"/>
- </geometry>
- <origin rpy="0 1.5 0" xyz="-0.1 -0.1 0"/>
- <material name="black"/>
- </visual>
- </link>
- <joint name="joint_base_wheel1" type="fixed">
- <parent link="base_link"/>
- <child link="wheel_1"/>
- </joint>
- <joint name="joint_base_wheel2" type="fixed">
- <parent link="base_link"/>
- <child link="wheel_2"/>
- </joint>
- <joint name="joint_base_wheel3" type="fixed">
- <parent link="base_link"/>
- <child link="wheel_3"/>
- </joint>
- <joint name="joint_base_wheel4" type="fixed">
- <parent link="base_link"/>
- <child link="wheel_4"/>
- </joint>
- </robot>
我们可以看到rviz的结果,如图一所示。
这下我们差不多完成了。我们马上就可以移动我们的小车啦。
但是等等,在我们的URDF文件中,内嵌了关于各个部件的大小参数以及位置。这些当然是我们根据草图用计算器算出来的。
但是这样的扩展性也太差了吧?难道对每个模型我们都得这么计算吗?对于相同模型的不同尺寸我们还得重新计算一次?
第四步: Xacro
什么是Xacro? 我们可以把它理解成为针对URDF的扩展性和配置性而设计的宏语言(macro language)。
有了Xacro,我们就可以像编程一样来写URDF文件了。
首先我们来看Xacro文件的变量定义:
- <xacro:property name="body_width" value=".2" />
只要定义了body_width,我们就可以通过${body_width}来引用其值了。有了这个,至少我们可以把需要配置的变量进行统一管理。
其次,我们来看一下Xacro如何进行宏定义。
这里的宏和C语言的宏很像,在转换成URDF文件时编译器会将其展开。其基本语法为:
- <xacro:macro name="wheel" params="param1 param2">
- </xacro:macro>
我们来看下URDF文件中关于车身和车轮的大小描述。
<box size="0.2 .3 .1"/>
<origin rpy="0 0 0" xyz="0 0 0.05"/>
<cylinder length="0.05" radius="0.05"/>
<origin rpy="0 1.5 0" xyz="-0.1 0.1 0"/>
这里涉及到的参数有:
车身的大小(body_size),车身中心的位置(body_pos)。
车轮半径(wheel_radius)和轮胎宽度(wheel_width),车轮圆心的位置(wheel1_pos, wheel2_pos, wheel3_pos, wheel4_pos)。
相应的在Xacro中定义参数的语法为:
- <xacro:property name="body_size" value=".2 .3 .1" />
- <xacro:property name="body_pos" value="0 0 0.05" />
- <xacro:property name="wheel_radius" value="0.05" />
- <xacro:property name="wheel_length" value="0.05" />
- <xacro:property name="wheel1_pos" value="0.1 0.1 0" />
- <xacro:property name="wheel2_pos" value="-0.1 0.1 0" />
- <xacro:property name="wheel3_pos" value="0.1 -0.1 0" />
- <xacro:property name="wheel4_pos" value="-0.1 -0.1 0" />
并且每个轮子和连接的代码也基本相同。
基于上述亮点,我们可以得到以下xacro文件。04_xacro.xacro
- <?xml version="1.0"?>
- <robot xmlns:sensor="http://playerstage.sourceforge.net/gazebo/xmlschema/#sensor"
- xmlns:controller="http://playerstage.sourceforge.net/gazebo/xmlschema/#controller"
- xmlns:interface="http://playerstage.sourceforge.net/gazebo/xmlschema/#interface"
- xmlns:xacro="http://playerstage.sourceforge.net/gazebo/xmlschema/#interface" name="test_robot">
- <xacro:property name="body_size" value=".2 .3 .1" />
- <xacro:property name="body_pos" value="0 0 0.05" />
- <xacro:property name="wheel_radius" value="0.05" />
- <xacro:property name="wheel_length" value="0.05" />
- <xacro:property name="wheel1_pos" value="0.1 0.1 0" />
- <xacro:property name="wheel2_pos" value="-0.1 0.1 0" />
- <xacro:property name="wheel3_pos" value="0.1 -0.1 0" />
- <xacro:property name="wheel4_pos" value="-0.1 -0.1 0" />
- <xacro:macro name="wheel" params="wheelname position">
- <link name="${wheelname}">
- <visual>
- <geometry>
- <cylinder length="${wheel_length}" radius="${wheel_radius}"/>
- </geometry>
- <origin rpy="0 1.5 0" xyz="${position}"/>
- <material name="black">
- <color rgba="0 0 0 1"/>
- </material>
- </visual>
- </link>
- <joint name="joint_base_${wheelname}" type="fixed">
- <parent link="base_link"/>
- <child link="${wheelname}"/>
- </joint>
- </xacro:macro>
- <xacro:wheel wheelname="wheel1" position="${wheel1_pos}"/>
- <xacro:wheel wheelname="wheel2" position="${wheel2_pos}"/>
- <xacro:wheel wheelname="wheel3" position="${wheel3_pos}"/>
- <xacro:wheel wheelname="wheel4" position="${wheel4_pos}"/>
- <link name="base_link">
- <visual>
- <geometry>
- <box size="${body_size}"/>
- </geometry>
- <origin rpy="0 0 0" xyz="${body_pos}"/>
- <material name="white">
- <color rgba="1 1 1 1"/>
- </material>
- </visual>
- </link>
- </robot>
验证该文件的正确性可以有两种方法。
1. 转换成URDF文件,使用check_urdf
- rosrun xacro xacro.py 04_xacro.xacro > 04_xacro.urdf
2. 使用xacrodisplay.launch
- roslaunch urdf_tutorial xacrodisplay.launch model:=04_xacro.xacro
我们都会得到和图1一样的小车模型。这下我们就可以用Xacro来构建机器人模型了。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号