
PCLVisualizer可视化类(2)
博客转载自:http://www.pclcn.org/study/shownews.php?lang=cn&id=163
可视化点云颜色特征
多数情况下,点云显示不采用简单的XYZ类型,常用的点云类型是XYZRGB点,也包含颜色数据,除此之外,用户还希望给指定点云定制颜色,以使点云在视窗中比较容易区分,如图1所示,点赋予不同的颜色表征其对应的z轴值不同。PCLVizualizer可根据所存储的颜色数据为点云赋色,或者按照用户自定义的颜色为点云着色。许多设备,比如微软Kinect,可获取带有RGB数据的点云,PCLVizualizer可视化类可使用这种颜色数据为点云着色,rgbVis函数中的代码用于完成这种操作。
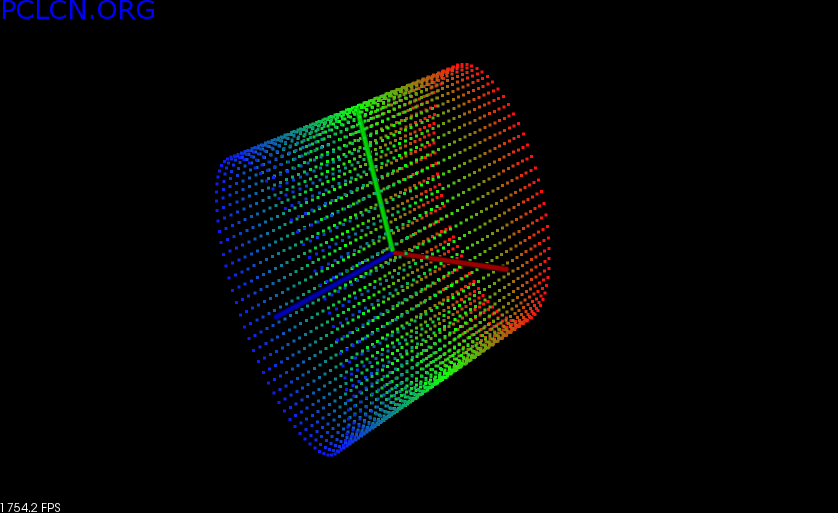
图1 可视化带颜色信息的点云
与前面的代码相比,这个代码没有太大的改变。
boost::shared_ptr<pcl::visualization::PCLVisualizer> rgbVis (pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud)
首先,与前面简单示例相比点云类型发生了变化,这里使用的点云带有RGB数据的属性字段,这是比较关键的一点,没有RGB字段的点云(点云的类型不一定必须只限定为点类型PointXYZRGB,只要包括三个颜色分量即可),PCLVisualizer类将不知道该为点云着什么颜色。
pcl::visualization::PointCloudColorHandlerRGB<pcl::PointXYZRGB> rgb(point_cloud_ptr);
其次,设置窗口的背景颜色后,我们创建一个颜色处理对象PointCloudColorHandlerRGB,PCLVisualizer类利用这样的对象显示自定义颜色数据,在这个示例中,PointCloudColorHandlerRGB对象得到每个点云的RGB颜色字段,其他的类似于PointCloudColorHandlerRGB对象有多种应用,在下一个示例中我们将学习另一种着色方法,但是这个处理也可用于其他操作,比如由其他字段映射出来的颜色、或者由几何特征映射出来的颜色,更详细的信息请参照API文档。
viewer->addPointCloud<pcl::PointXYZRGB> (cloud, rgb, "sample cloud");
最后,当我们添加点云的时候,我们可以指定添加到视窗中点云的PointCloudColorHandlerRGB着色处理对象。
可视化点云自定义颜色特征
第三个示例函数是演示怎样给点云着上单独的一种颜色,我们可以利用该技术给指定的点云着色,以使所着色的点云区别与其他点云,如图2所示用户自定义所有点云颜色为绿色,在这个示例中,customColourVis函数中,我们将点云赋为绿色,在这里,我们也设置了较大的点云显示尺寸,以使点云及颜色更明显。
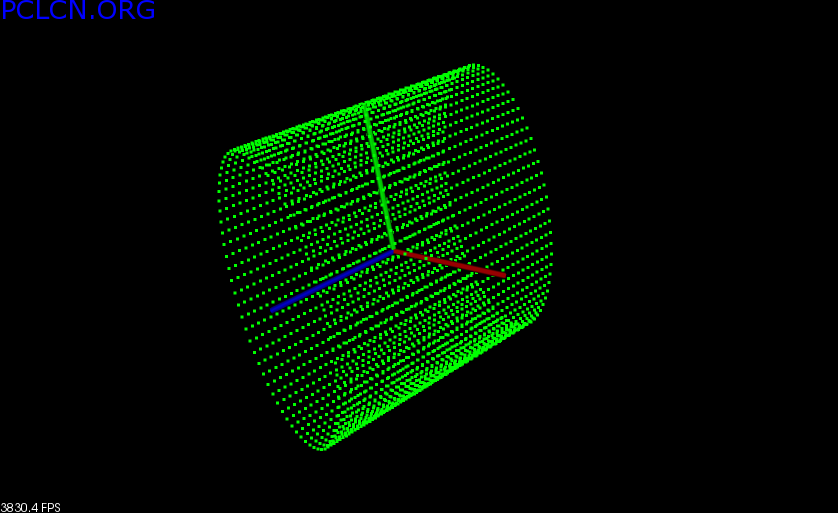
图2 单独一种颜色的点云
与前面情况相同,下面的这段示例代码跟上面那段示例代码没有太大改变。
boost::shared_ptr<pcl::visualization::PCLVisualizer> customColourVis (pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud)
这个示例中所用的点云类型是XYZ类型。在自定义着色处理对象PointCloudColorHandlerCustom中,没有那个点云字段用作颜色字段,不论所用的点云是什么类型,我们都可以为点云着自定义颜色。
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> single_color (cloud, 0, 255, 0);
所以,这里我们需要创建一个自定义颜色处理器PointCloudColorHandlerCustom对象,并设置颜色为纯绿色。
viewer->addPointCloud<pcl::PointXYZ> (cloud, single_color, "sample cloud");


 浙公网安备 33010602011771号
浙公网安备 33010602011771号