

Matlab 摄像机标定+畸变校正
博客转载自:http://blog.csdn.net/Loser__Wang/article/details/51811347
本文目的在于记录如何使用MATLAB做摄像机标定,并通过opencv进行校正后的显示。
首先关于校正的基本知识通过OpenCV官网的介绍即可简单了解:
http://docs.opencv.org/2.4/doc/tutorials/calib3d/camera_calibration/camera_calibration.html
对于摄像机我们所关心的主要参数为摄像机内参,以及几个畸变系数。上面的连接中后半部分也给了如何标定,然而OpenCV自带的标定程序稍显繁琐。因而在本文中我主推使用MATLAB的工具箱。下面让我们开始标定过程。
标定板
标定的最开始阶段最需要的肯定是标定板。两种方法,直接从opencv官网上能下载到:
http://docs.opencv.org/2.4/_downloads/pattern.png
方法二:逼格满满(MATLAB)
J = (checkerboard(300,4,5)>0.5); figure, imshow(J);
采集数据
那么有了棋盘格之后自然是需要进行照片了。不多说,直接上程序。按q键即可保存图像,尽量把镜头的各个角度都覆盖好。

#include "opencv2/opencv.hpp" #include <string> #include <iostream> using namespace cv; using namespace std; int main() { VideoCapture inputVideo(0); //inputVideo.set(CV_CAP_PROP_FRAME_WIDTH, 320); //inputVideo.set(CV_CAP_PROP_FRAME_HEIGHT, 240); if (!inputVideo.isOpened()) { cout << "Could not open the input video " << endl; return -1; } Mat frame; string imgname; int f = 1; while (1) //Show the image captured in the window and repeat { inputVideo >> frame; // read if (frame.empty()) break; // check if at end imshow("Camera", frame); char key = waitKey(1); if (key == 27)break; if (key == 'q' || key == 'Q') { imgname = to_string(f++) + ".jpg"; imwrite(imgname, frame); } } cout << "Finished writing" << endl; return 0; }
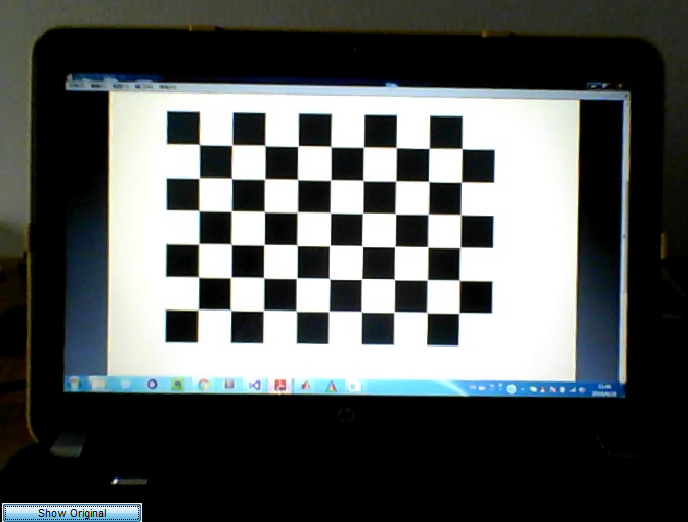
保存大约15到20张即可。大家可以看到我的方法,直接对着实验室的屏幕拍摄的。这个阶段有个注意事项就是测量好屏幕上每个方格的大小,这个标定的时候会用到。

进行标定
直接而在MATLAB的Command Window里面输入cameraCalibrator即可调用标定应用。

首先先把之前照好的图像添加进去,这是出现:

这就是之前让你记录的标定板中每个方格的大小。 输入无误后就涉及到最关键的一步了(MATLAB的这个实在太方便了,都是傻瓜式操作),选择参数。
为什么说他关键呢,因为如果你仔细阅读了OpenCV的说明之后你会大概明白畸变参数,总共有五个,径向畸变3个(k1,k2,k3)和切向畸变2个(p1,p2)。
径向畸变

切向畸变

以及在OpenCV中的畸变系数的排列(这点一定要注意k1,k2,p1,p2,k3),千万不要以为k是连着的。

并且通过实验表明,三个参数的时候由于k3所对应的非线性较为剧烈。估计的不好,容易产生极大的扭曲,所以我们在MATLAB中选择使用两参数,并且选择错切和桶形畸变。

点击开始后等待一段时间即可完成标定。并且MATLAB给出的可视化还是很不错的,可以对比校正前后的样子

点击show Undistorted即可看到无畸变的图像
到这为止,你已经完成了标定过程。选择导出参数,即可把参数进行保存。

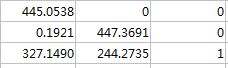
保存后可以退出标定应用,在MATLAB主界面中将保存的Mat文件打开
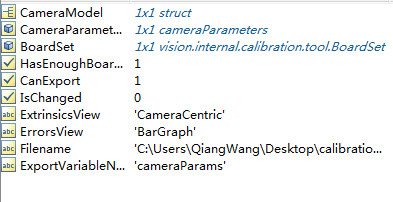
第二行就是参数
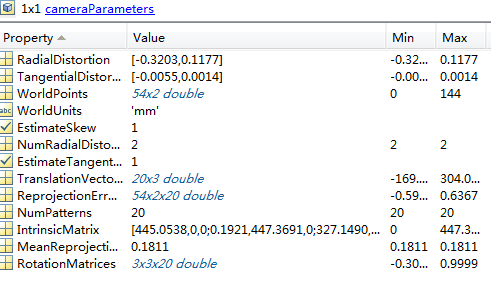
里面的RadialDistortion对应k1,k2,k3设置为0了。
TangentialDistortion对应p1,p2。
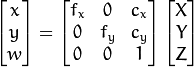
IntrinsicMatrix对应内参,注意这个和OpenCV中是转置的关系,注意不要搞错。
对应
OpenCV中查看标定的结果
#include "opencv2/opencv.hpp" #include <iostream> using namespace cv; using namespace std; int main() { VideoCapture inputVideo(0); if (!inputVideo.isOpened()) { cout << "Could not open the input video: " << endl; return -1; } Mat frame; Mat frameCalibration; inputVideo >> frame; Mat cameraMatrix = Mat::eye(3, 3, CV_64F); cameraMatrix.at<double>(0, 0) = 4.450537506243416e+02; cameraMatrix.at<double>(0, 1) = 0.192095145445498; cameraMatrix.at<double>(0, 2) = 3.271489590204837e+02; cameraMatrix.at<double>(1, 1) = 4.473690628394497e+02; cameraMatrix.at<double>(1, 2) = 2.442734958206504e+02; Mat distCoeffs = Mat::zeros(5, 1, CV_64F); distCoeffs.at<double>(0, 0) = -0.320311439187776; distCoeffs.at<double>(1, 0) = 0.117708464407889; distCoeffs.at<double>(2, 0) = -0.00548954846049678; distCoeffs.at<double>(3, 0) = 0.00141925006352090; distCoeffs.at<double>(4, 0) = 0; Mat view, rview, map1, map2; Size imageSize; imageSize = frame.size(); initUndistortRectifyMap(cameraMatrix, distCoeffs, Mat(), getOptimalNewCameraMatrix(cameraMatrix, distCoeffs, imageSize, 1, imageSize, 0), imageSize, CV_16SC2, map1, map2); while (1) //Show the image captured in the window and repeat { inputVideo >> frame; // read if (frame.empty()) break; // check if at end remap(frame, frameCalibration, map1, map2, INTER_LINEAR); imshow("Origianl", frame); imshow("Calibration", frameCalibration); char key = waitKey(1); if (key == 27 || key == 'q' || key == 'Q')break; } return 0; }
修复之前和之后的结果对比

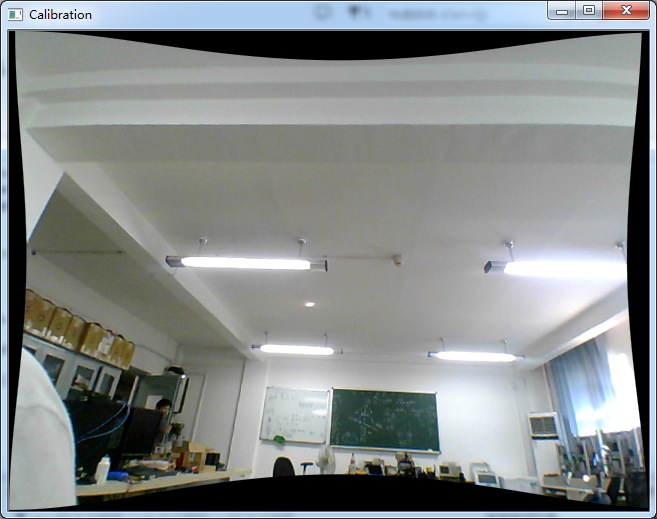
还有就是之前讨论的为什么选2系数而不是3系数。因为。。。。。。。 下面是三系数的修正结果,惨不忍睹啊


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 记一次.NET内存居高不下排查解决与启示
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 【自荐】一款简洁、开源的在线白板工具 Drawnix
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
· Docker 太简单,K8s 太复杂?w7panel 让容器管理更轻松!