

cubic spline interpolation 概念解释和实现
博客参考:https://blog.csdn.net/flyingleo1981/article/details/53008931
样条插值是一种工业设计中常用的、得到平滑曲线的一种插值方法,三次样条又是其中用的较为广泛的一种。本篇介绍力求用容易理解的方式,介绍一下三次样条插值的原理,并附C语言的实现代码。
1. 三次样条曲线原理
假设有以下节点
1.1 定义
条曲线![]() 是一个分段定义的公式。给定n+1个数据点,共有n个区间,三次样条方程满足以下条件:
是一个分段定义的公式。给定n+1个数据点,共有n个区间,三次样条方程满足以下条件:
- 在每个分段区间
 (i = 0, 1, …, n-1,x递增),
(i = 0, 1, …, n-1,x递增),  都是一个三次多项式
都是一个三次多项式 - 满足
 (i = 0, 1, …, n )
(i = 0, 1, …, n )  ,导数
,导数 ,二阶导数
,二阶导数 在[a, b]区间都是连续的,即
在[a, b]区间都是连续的,即 曲线是光滑的。
曲线是光滑的。
所以n个三次多项式分段可以写作:
![]() ,i = 0, 1, …, n-1
,i = 0, 1, …, n-1
其中ai, bi, ci, di代表4n个未知系数。
1.2 求解
已知条件
- n+1个数据点[xi, yi], i = 0, 1, …, n
- 每一分段都是三次多项式函数曲线
- 节点达到二阶连续
- 左右两端点处特性(自然边界,固定边界,非节点边界)
根据定点,求出每段样条曲线方程中的系数,即可得到每段曲线的具体表达式。
- 插值和连续性:
![]() , 其中 i = 0, 1, …, n-1
, 其中 i = 0, 1, …, n-1
- 微分连续性:
 , 其中 i = 0, 1, …, n-2
, 其中 i = 0, 1, …, n-2
- 样条曲线的微分式:

将步长![]() 带入样条曲线的条件:
带入样条曲线的条件:
- 由
 (i = 0, 1, …, n-1) 推出:
(i = 0, 1, …, n-1) 推出: 
- 由
 (i = 0, 1, …, n-1) 推出:
(i = 0, 1, …, n-1) 推出: 
-
由
 (i = 0, 1, …, n-2) 推出:
(i = 0, 1, …, n-2) 推出:

由此可得:

4. 由 ![]() (i = 0, 1, …, n-2) 推出:
(i = 0, 1, …, n-2) 推出: 
- 设
 ,则
,则  可写为:
可写为: ,推出:
,推出: 
- 将ci, di带入
 可得:
可得:
- 将bi, ci, di带入
 (i = 0, 1, …, n-2)可得:
(i = 0, 1, …, n-2)可得:
端点条件
由i的取值范围可知,共有n-1个公式, 但却有n+1个未知量m 。要想求解该方程组,还需另外两个式子。所以需要对两端点x0和xn的微分加些限制。 选择不是唯一的,3种比较常用的限制如下。
- 自由边界(Natural)
首尾两端没有受到任何让它们弯曲的力,即![]() 。具体表示为
。具体表示为![]() 和
和 ![]() . 则要求解的方程组可写为:
. 则要求解的方程组可写为:
2. 固定边界(Clamped)
首尾两端点的微分值是被指定的,这里分别定为A和B。则可以推出
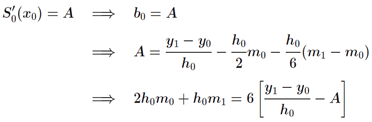
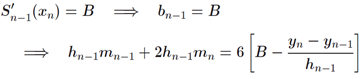
将上述两个公式带入方程组,新的方程组左侧为

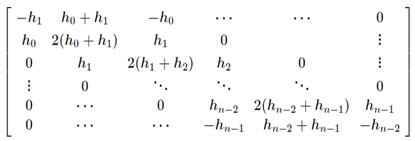
3. 非节点边界(Not-A-Knot)
指定样条曲线的三次微分匹配,即
 和
和 
根据![]() 和
和![]() ,则上述条件变为:
,则上述条件变为:  和
和 
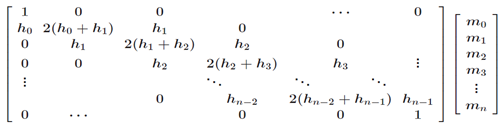
新的方程组系数矩阵可写为:
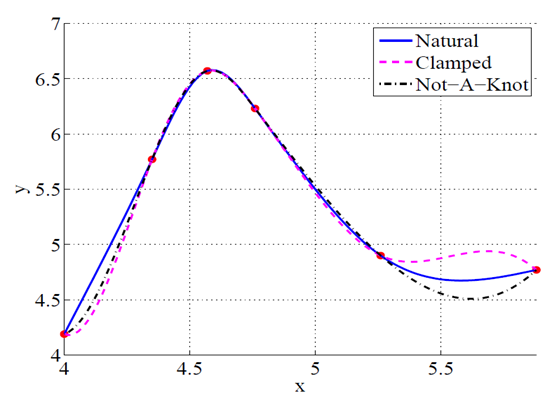
右下图可以看出不同的端点边界对样条曲线的影响:
1.3 算法总结
假定有n+1个数据节点: 
- 计算步长
 (i = 0, 1, …, n-1)
(i = 0, 1, …, n-1) - 将数据节点和指定的首位端点条件带入矩阵方程
- 解矩阵方程,求得二次微分值
 。该矩阵为三对角矩阵,具体求法参见我的上篇文章:三对角矩阵的求解。
。该矩阵为三对角矩阵,具体求法参见我的上篇文章:三对角矩阵的求解。 - 计算样条曲线的系数:
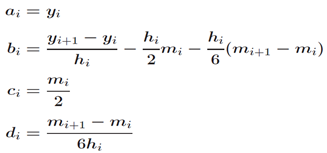
其中i = 0, 1, …, n-1
5. 在每个子区间![]() 中,创建方程
中,创建方程 
2. C++ 语言实现
C++语言写了一个三次样条插值(自然边界)函数,代码为 Udacity Path Planning 课程中使用的 simple cubic spline interpolation library without external 文件。
/*
* spline.h
*
* simple cubic spline interpolation library without external
* dependencies
*
* ---------------------------------------------------------------------
* Copyright (C) 2011, 2014 Tino Kluge (ttk448 at gmail.com)
*
* This program is free software; you can redistribute it and/or
* modify it under the terms of the GNU General Public License
* as published by the Free Software Foundation; either version 2
* of the License, or (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program. If not, see <http://www.gnu.org/licenses/>.
* ---------------------------------------------------------------------
*
*/
#ifndef TK_SPLINE_H
#define TK_SPLINE_H
#include <cstdio>
#include <cassert>
#include <vector>
#include <algorithm>
// unnamed namespace only because the implementation is in this
// header file and we don't want to export symbols to the obj files
namespace
{
namespace tk
{
// band matrix solver
class band_matrix
{
private:
std::vector< std::vector<double> > m_upper; // upper band
std::vector< std::vector<double> > m_lower; // lower band
public:
band_matrix() {}; // constructor
band_matrix(int dim, int n_u, int n_l); // constructor
~band_matrix() {}; // destructor
void resize(int dim, int n_u, int n_l); // init with dim,n_u,n_l
int dim() const; // matrix dimension
int num_upper() const
{
return m_upper.size()-1;
}
int num_lower() const
{
return m_lower.size()-1;
}
// access operator
double & operator () (int i, int j); // write
double operator () (int i, int j) const; // read
// we can store an additional diogonal (in m_lower)
double& saved_diag(int i);
double saved_diag(int i) const;
void lu_decompose();
std::vector<double> r_solve(const std::vector<double>& b) const;
std::vector<double> l_solve(const std::vector<double>& b) const;
std::vector<double> lu_solve(const std::vector<double>& b,
bool is_lu_decomposed=false);
};
// spline interpolation
class spline
{
public:
enum bd_type
{
first_deriv = 1,
second_deriv = 2
};
private:
std::vector<double> m_x,m_y; // x,y coordinates of points
// interpolation parameters
// f(x) = a*(x-x_i)^3 + b*(x-x_i)^2 + c*(x-x_i) + y_i
std::vector<double> m_a,m_b,m_c; // spline coefficients
double m_b0, m_c0; // for left extrapol
bd_type m_left, m_right;
double m_left_value, m_right_value;
bool m_force_linear_extrapolation;
public:
// set default boundary condition to be zero curvature at both ends
spline(): m_left(second_deriv), m_right(second_deriv), m_left_value(0.0), m_right_value(0.0), m_force_linear_extrapolation(false)
{
;
}
// optional, but if called it has to come be before set_points()
void set_boundary(bd_type left, double left_value,
bd_type right, double right_value,
bool force_linear_extrapolation=false);
void set_points(const std::vector<double>& x, const std::vector<double>& y, bool cubic_spline=true);
double operator() (double x) const;
};
// ---------------------------------------------------------------------
// implementation part, which could be separated into a cpp file
// ---------------------------------------------------------------------
// band_matrix implementation
// -------------------------
band_matrix::band_matrix(int dim, int n_u, int n_l)
{
resize(dim, n_u, n_l);
}
void band_matrix::resize(int dim, int n_u, int n_l)
{
assert(dim>0);
assert(n_u>=0);
assert(n_l>=0);
m_upper.resize(n_u+1);
m_lower.resize(n_l+1);
for(size_t i=0; i<m_upper.size(); i++) {
m_upper[i].resize(dim);
}
for(size_t i=0; i<m_lower.size(); i++) {
m_lower[i].resize(dim);
}
}
int band_matrix::dim() const
{
if(m_upper.size()>0) {
return m_upper[0].size();
} else {
return 0;
}
}
// defines the new operator (), so that we can access the elements
// by A(i,j), index going from i=0,...,dim()-1
double & band_matrix::operator () (int i, int j)
{
int k=j-i; // what band is the entry
assert( (i>=0) && (i<dim()) && (j>=0) && (j<dim()) );
assert( (-num_lower()<=k) && (k<=num_upper()) );
// k=0 -> diogonal, k<0 lower left part, k>0 upper right part
if(k>=0) return m_upper[k][i];
else return m_lower[-k][i];
}
double band_matrix::operator () (int i, int j) const
{
int k=j-i; // what band is the entry
assert( (i>=0) && (i<dim()) && (j>=0) && (j<dim()) );
assert( (-num_lower()<=k) && (k<=num_upper()) );
// k=0 -> diogonal, k<0 lower left part, k>0 upper right part
if(k>=0) return m_upper[k][i];
else return m_lower[-k][i];
}
// second diag (used in LU decomposition), saved in m_lower
double band_matrix::saved_diag(int i) const
{
assert( (i>=0) && (i<dim()) );
return m_lower[0][i];
}
double & band_matrix::saved_diag(int i)
{
assert( (i>=0) && (i<dim()) );
return m_lower[0][i];
}
// LR-Decomposition of a band matrix
void band_matrix::lu_decompose()
{
int i_max,j_max;
int j_min;
double x;
// preconditioning
// normalize column i so that a_ii=1
for(int i=0; i<this->dim(); i++) {
assert(this->operator()(i,i)!=0.0);
this->saved_diag(i)=1.0/this->operator()(i,i);
j_min=std::max(0,i-this->num_lower());
j_max=std::min(this->dim()-1,i+this->num_upper());
for(int j=j_min; j<=j_max; j++) {
this->operator()(i,j) *= this->saved_diag(i);
}
this->operator()(i,i)=1.0; // prevents rounding errors
}
// Gauss LR-Decomposition
for(int k=0; k<this->dim(); k++) {
i_max=std::min(this->dim()-1,k+this->num_lower()); // num_lower not a mistake!
for(int i=k+1; i<=i_max; i++) {
assert(this->operator()(k,k)!=0.0);
x=-this->operator()(i,k)/this->operator()(k,k);
this->operator()(i,k)=-x; // assembly part of L
j_max=std::min(this->dim()-1,k+this->num_upper());
for(int j=k+1; j<=j_max; j++) {
// assembly part of R
this->operator()(i,j)=this->operator()(i,j)+x*this->operator()(k,j);
}
}
}
}
// solves Ly=b
std::vector<double> band_matrix::l_solve(const std::vector<double>& b) const
{
assert( this->dim()==(int)b.size() );
std::vector<double> x(this->dim());
int j_start;
double sum;
for(int i=0; i<this->dim(); i++) {
sum=0;
j_start=std::max(0,i-this->num_lower());
for(int j=j_start; j<i; j++) sum += this->operator()(i,j)*x[j];
x[i]=(b[i]*this->saved_diag(i)) - sum;
}
return x;
}
// solves Rx=y
std::vector<double> band_matrix::r_solve(const std::vector<double>& b) const
{
assert( this->dim()==(int)b.size() );
std::vector<double> x(this->dim());
int j_stop;
double sum;
for(int i=this->dim()-1; i>=0; i--) {
sum=0;
j_stop=std::min(this->dim()-1,i+this->num_upper());
for(int j=i+1; j<=j_stop; j++) sum += this->operator()(i,j)*x[j];
x[i]=( b[i] - sum ) / this->operator()(i,i);
}
return x;
}
std::vector<double> band_matrix::lu_solve(const std::vector<double>& b,
bool is_lu_decomposed)
{
assert( this->dim()==(int)b.size() );
std::vector<double> x,y;
if(is_lu_decomposed==false) {
this->lu_decompose();
}
y=this->l_solve(b);
x=this->r_solve(y);
return x;
}
// spline implementation
// -----------------------
void spline::set_boundary(spline::bd_type left, double left_value,
spline::bd_type right, double right_value,
bool force_linear_extrapolation)
{
assert(m_x.size()==0); // set_points() must not have happened yet
m_left=left;
m_right=right;
m_left_value=left_value;
m_right_value=right_value;
m_force_linear_extrapolation=force_linear_extrapolation;
}
void spline::set_points(const std::vector<double>& x,const std::vector<double>& y, bool cubic_spline)
{
assert(x.size()==y.size());
assert(x.size()>2);
m_x=x;
m_y=y;
int n = x.size();
// TODO: maybe sort x and y, rather than returning an error
for(int i=0; i<n-1; i++)
{
assert(m_x[i] < m_x[i+1]);
}
if(cubic_spline==true)
{
// cubic spline interpolation
// setting up the matrix and right hand side of the equation system
// for the parameters b[]
band_matrix A(n,1,1);
std::vector<double> rhs(n);
for(int i=1; i<n-1; i++)
{
A(i,i-1)=1.0/3.0*(x[i]-x[i-1]);
A(i,i)=2.0/3.0*(x[i+1]-x[i-1]);
A(i,i+1)=1.0/3.0*(x[i+1]-x[i]);
rhs[i]=(y[i+1]-y[i])/(x[i+1]-x[i]) - (y[i]-y[i-1])/(x[i]-x[i-1]);
}
// boundary conditions
if(m_left == spline::second_deriv)
{
// 2*b[0] = f''
A(0,0)=2.0;
A(0,1)=0.0;
rhs[0]=m_left_value;
}
else if(m_left == spline::first_deriv)
{
// c[0] = f', needs to be re-expressed in terms of b:
// (2b[0]+b[1])(x[1]-x[0]) = 3 ((y[1]-y[0])/(x[1]-x[0]) - f')
A(0,0)=2.0*(x[1]-x[0]);
A(0,1)=1.0*(x[1]-x[0]);
rhs[0]=3.0*((y[1]-y[0])/(x[1]-x[0])-m_left_value);
}
else
{
assert(false);
}
if(m_right == spline::second_deriv)
{
// 2*b[n-1] = f''
A(n-1,n-1)=2.0;
A(n-1,n-2)=0.0;
rhs[n-1]=m_right_value;
}
else if(m_right == spline::first_deriv)
{
// c[n-1] = f', needs to be re-expressed in terms of b:
// (b[n-2]+2b[n-1])(x[n-1]-x[n-2])
// = 3 (f' - (y[n-1]-y[n-2])/(x[n-1]-x[n-2]))
A(n-1,n-1)=2.0*(x[n-1]-x[n-2]);
A(n-1,n-2)=1.0*(x[n-1]-x[n-2]);
rhs[n-1]=3.0*(m_right_value-(y[n-1]-y[n-2])/(x[n-1]-x[n-2]));
} else {
assert(false);
}
// solve the equation system to obtain the parameters b[]
m_b=A.lu_solve(rhs);
// calculate parameters a[] and c[] based on b[]
m_a.resize(n);
m_c.resize(n);
for(int i=0; i<n-1; i++)
{
m_a[i]=1.0/3.0*(m_b[i+1]-m_b[i])/(x[i+1]-x[i]);
m_c[i]=(y[i+1]-y[i])/(x[i+1]-x[i])
- 1.0/3.0*(2.0*m_b[i]+m_b[i+1])*(x[i+1]-x[i]);
}
}
else
{
// linear interpolation
m_a.resize(n);
m_b.resize(n);
m_c.resize(n);
for(int i=0; i<n-1; i++)
{
m_a[i]=0.0;
m_b[i]=0.0;
m_c[i]=(m_y[i+1]-m_y[i])/(m_x[i+1]-m_x[i]);
}
}
// for left extrapolation coefficients
m_b0 = (m_force_linear_extrapolation==false) ? m_b[0] : 0.0;
m_c0 = m_c[0];
// for the right extrapolation coefficients
// f_{n-1}(x) = b*(x-x_{n-1})^2 + c*(x-x_{n-1}) + y_{n-1}
double h=x[n-1]-x[n-2];
// m_b[n-1] is determined by the boundary condition
m_a[n-1]=0.0;
m_c[n-1]=3.0*m_a[n-2]*h*h+2.0*m_b[n-2]*h+m_c[n-2]; // = f'_{n-2}(x_{n-1})
if(m_force_linear_extrapolation==true)
m_b[n-1]=0.0;
}
double spline::operator() (double x) const
{
size_t n=m_x.size();
// find the closest point m_x[idx] < x, idx=0 even if x<m_x[0]
std::vector<double>::const_iterator it;
it=std::lower_bound(m_x.begin(),m_x.end(),x);
int idx=std::max( int(it-m_x.begin())-1, 0);
double h=x-m_x[idx];
double interpol;
if(x<m_x[0])
{
// extrapolation to the left
interpol=(m_b0*h + m_c0)*h + m_y[0];
}
else if(x>m_x[n-1])
{
// extrapolation to the right
interpol=(m_b[n-1]*h + m_c[n-1])*h + m_y[n-1];
}
else
{
// interpolation
interpol=((m_a[idx]*h + m_b[idx])*h + m_c[idx])*h + m_y[idx];
}
return interpol;
}
} // namespace tk
} // namespace
#endif /* TK_SPLINE_H */
显示效果如下

