
ROS 三维激光数据转化为二维激光数据
博客转自:https://blog.csdn.net/weixin_42005898/article/details/102498358 和 ros-perception
1. 安装pointcloud_to_laserscan包
cd /home/ke/ros/pointcloud_to_laserscan_ws/src git clone https://github.com/ros-perception/pointcloud_to_laserscan.git cd .. catkin_make
2. 创建launch文件
<?xml version="1.0"?> <launch> <!-- run pointcloud_to_laserscan node --> <node pkg="pointcloud_to_laserscan" type="pointcloud_to_laserscan_node" name="pointcloud_to_laserscan"> <remap from="cloud_in" to="/velodyne_points"/> <rosparam> # target_frame: rslidar # Leave disabled to output scan in pointcloud frame transform_tolerance: 0.01 min_height: -0.4 max_height: 1.0 angle_min: -3.1415926 # -M_PI angle_max: 3.1415926 # M_PI angle_increment: 0.003 # 0.17degree scan_time: 0.1 range_min: 0.2 range_max: 100 use_inf: true inf_epsilon: 1.0 # Concurrency level, affects number of pointclouds queued for processing and number of threads used # 0 : Detect number of cores # 1 : Single threaded # 2->inf : Parallelism level concurrency_level: 1 </rosparam> </node> </launch>
这里需要注意的是这句代码:<remap from="cloud_in" to="/velodyne_points"/>。因为激光雷达节点发布的信息是/velodyne_points,因此需要将pointcloud_to_laserscan的订阅信息从默认的cloud_in改为/velodyne_points。我使用的是如下的包,可从网络上下载
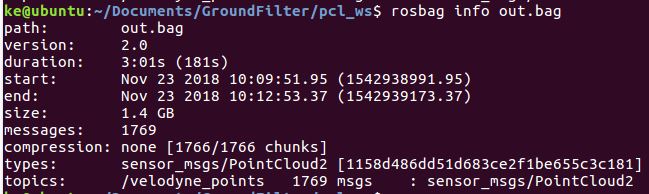
发布的是/velodyne_points消息,类型为sensor_msgs/PointCloud2
3.启动pointcloud_to_laserscan节点和利用rosbag回放激光数据
#terminal 1 rocore #terminal 2 rosbag plag out.bag
之后启动rviz 和 pointcloud_to_laserscan节点
#terminal 3 rosrun rviz rviz #terminal 4 roslaunch pointcloud_to_laserscan point_to_scan.launch
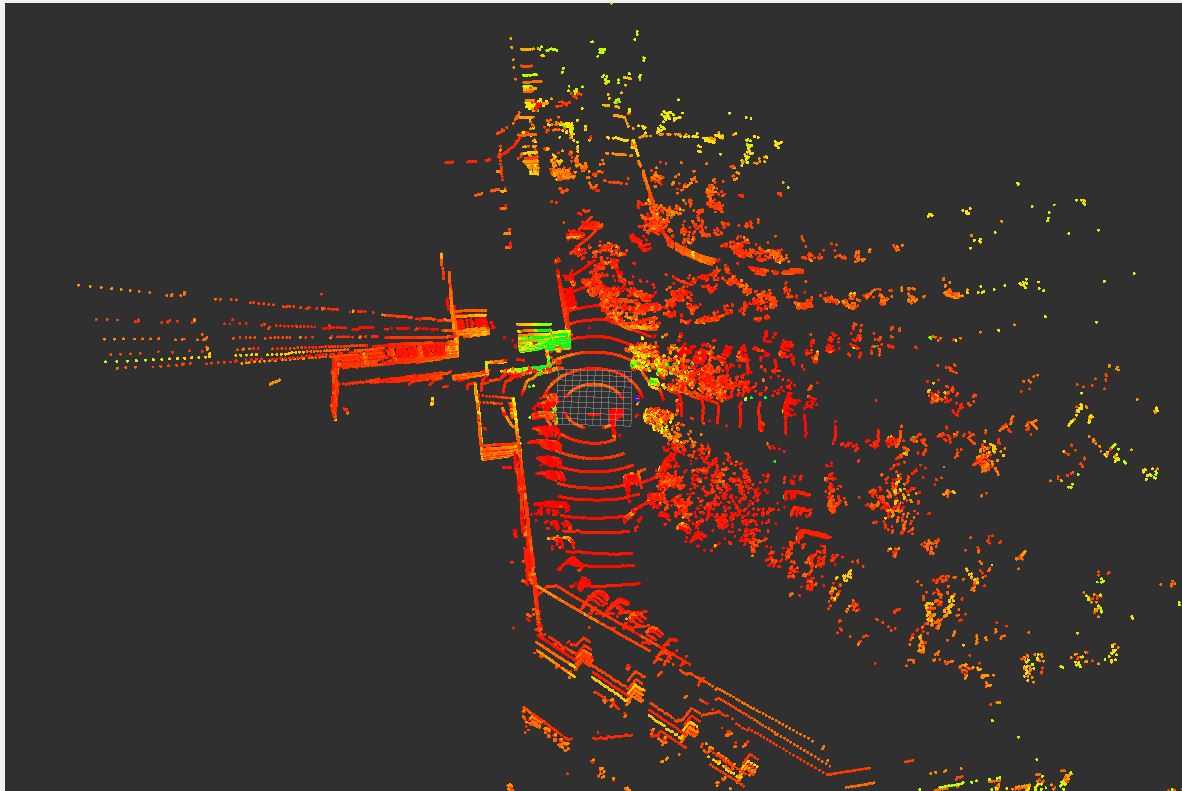
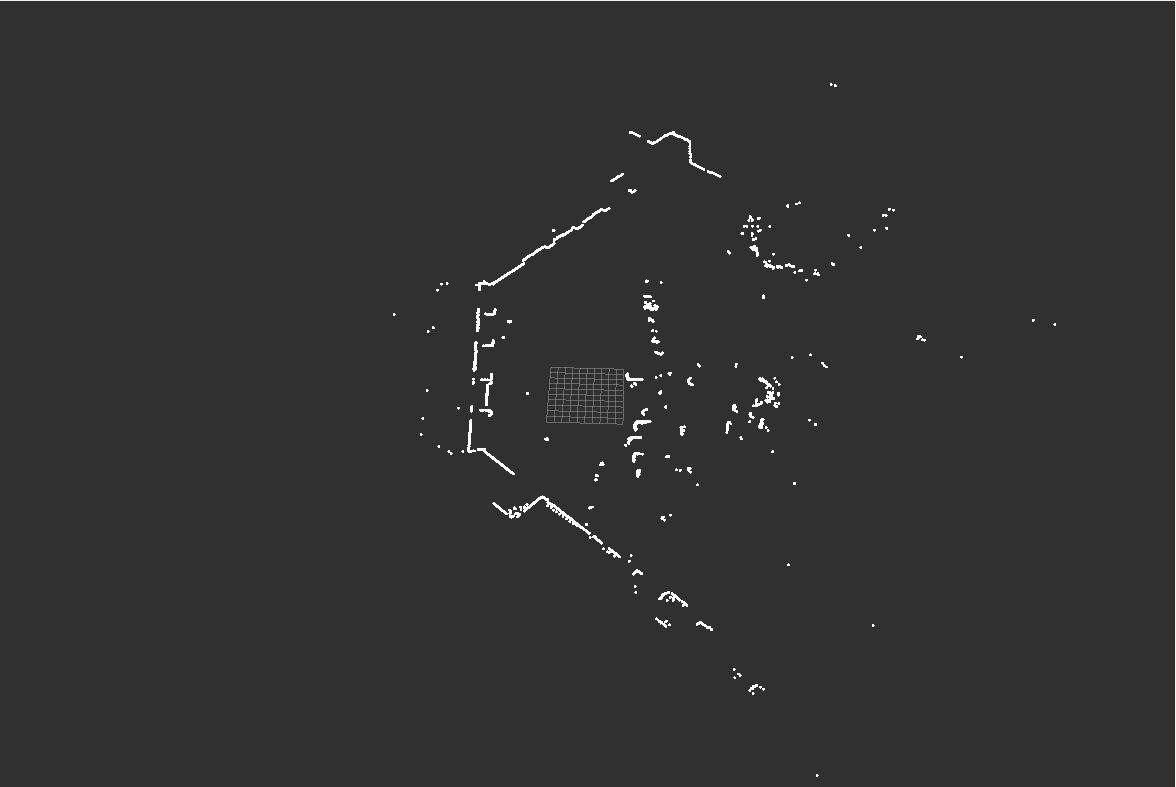
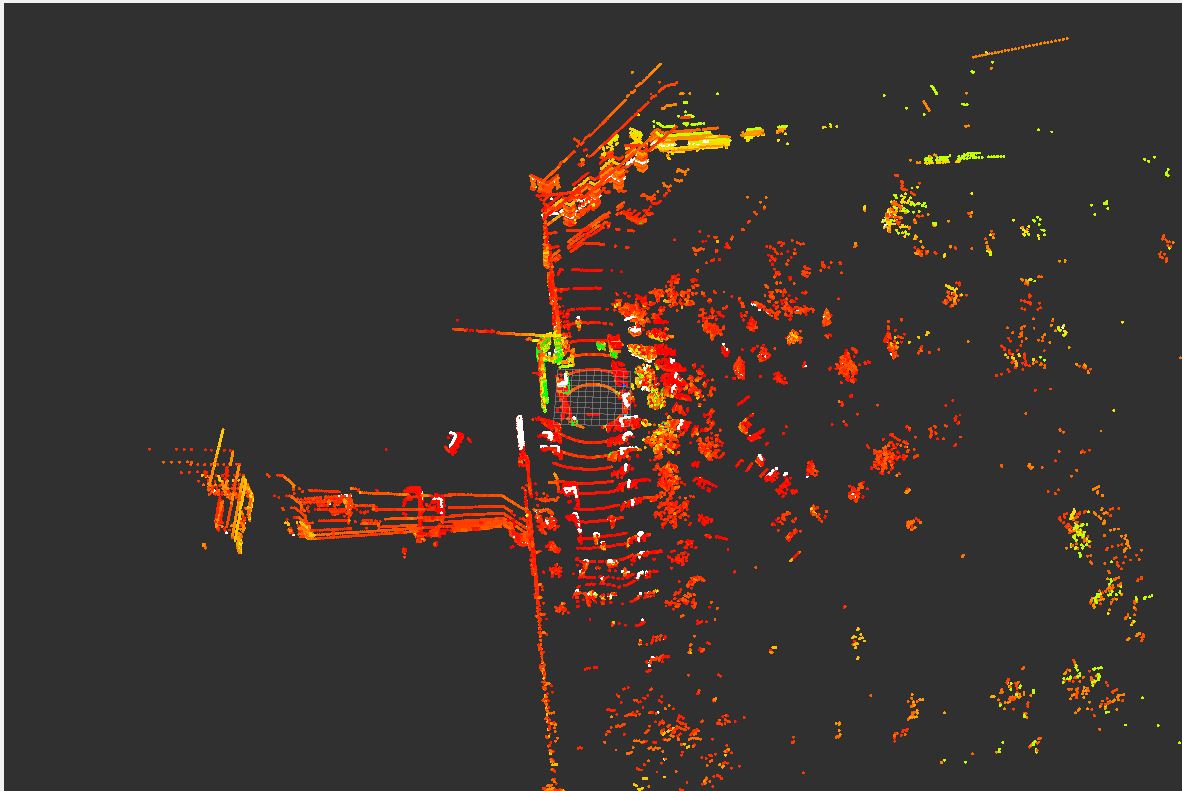
效果如下,分别为三维点云,二维点云和混合效果
rviz的配置如下
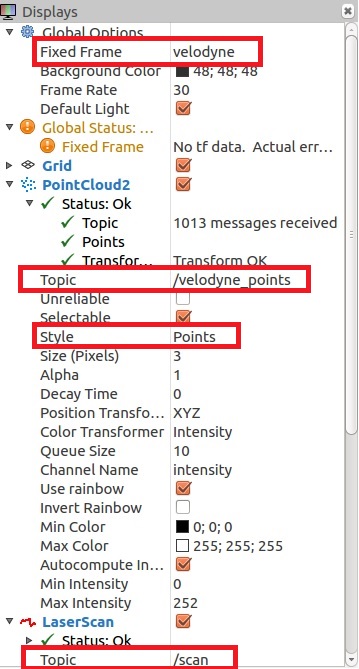
Q1. 如何确定 Global Options的属性Fixed Frame: https://blog.csdn.net/sunyoop/article/details/78804941
Q2. 如何使用rosbag回放激光数据:https://blog.csdn.net/wutao1201/article/details/88225649

 浙公网安备 33010602011771号
浙公网安备 33010602011771号