数据库内核:PostgreSQL 索引
索引(Indexing)
索引分类
索引就是 \((keyVal,tupleID)\) 对构成的文件。
一维索引是基于单个属性值 A,这个属性有可能是数据文件的排序键,有可能其取值是不重复的。因此,基于索引属性种类可以将索引类型进行分类:
- Primary:属性 A 的取值是不重复(主键),且数据文件可能基于其进行排序的
- Clustering:属性 A 的取值有重复 (非主键),但是数据文件一定是基于其排序的
- Secondary:数据文件不基属性 A 进行排序
一张表可能会有分别基于多个不同属性的多个索引文件。
索引构造方式
索引的构造方式有:
- Dense:每个元组都由索引文件中的条目引用
- Sparse: 只有一部分元组由索引文件中的条目引用
- Single-level:元组通过索引文件直接访问
- Multi-level:可能需要访问几个索引页面才能得到元组
因此,索引会有 \(i\) 个页面,显然这里的 \(i\) 一定远远小于数据文件中的 \(b\) 个页面。而索引文件的每个页存储元组的容量为 \(c_i\) (\(c_i>>c\))。
- Dense index:\(i=ceil(\frac{r}{c_i})\)
- Sparse index:\(i=ceil(\frac{b}{c_i})\)
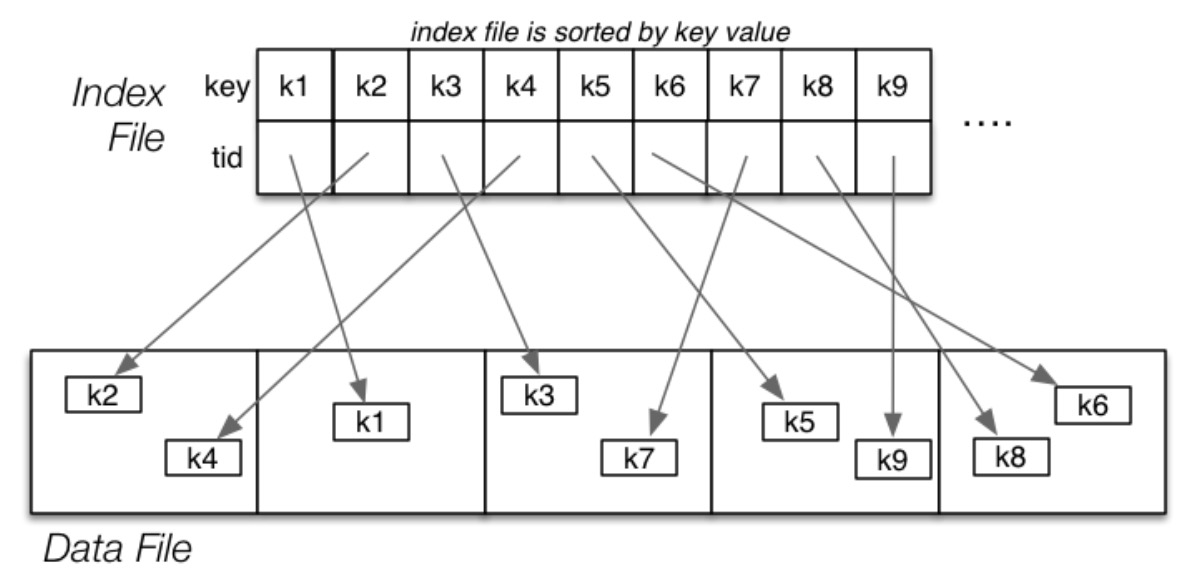
Primary Index
Dense Primary Index
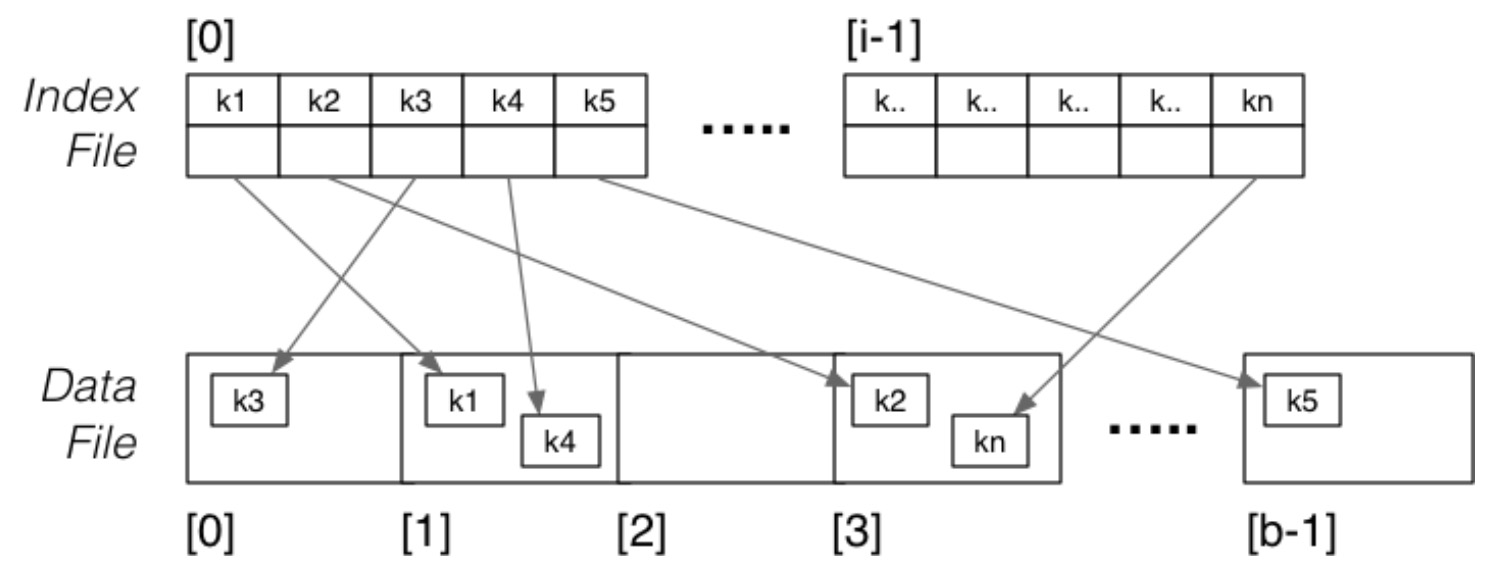
数据文件是未排序的,每个元组对应一个索引实体。
Sparse Primary Index
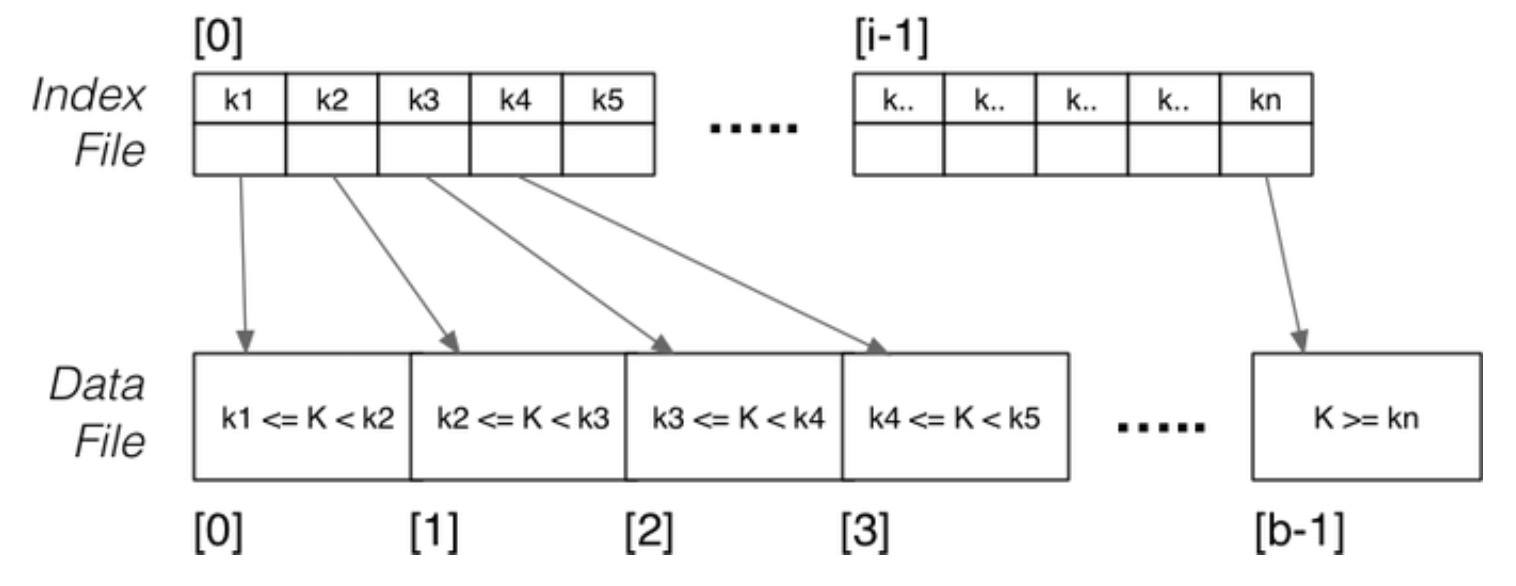
数据文件是排序的,每一个页面对应一个索引实体。
练习
一张关系表的参数如下:
- \(B=8192,R=128,r=100000\)
- 数据页面的头部信息占 \(256\) 字节
- 键是整数,数据文件按照该键排序
- 索引实体 \((keyVal,tupleID)\) 每个为 \(8\) 字节
- 索引页面的头部信息占 \(32\) 字节
问:Dense Index 需要多少个页面,Sparse Index 需要多少个页面?
每个页面大小为 \(8192\) 字节,索引头部占 \(32\) 字节,除去之后,剩余 \(8160\) 字节,每个索引实体又占 \(8\) 字节 ,所以索引页面可以存在 \(c_i=\frac{8160}{8}=1020\) 个索引实体。
数据页面的头部信息占 \(256\) 字节,除去之后,剩余 \(7936\) 字节,平均每个元组占 \(R=128\) 字节,因此数据页面可以存 \(c=\frac{7936}{128}=62\) 个元组,一共有 \(r=100000\) 个元组,所以需要 \(\lceil\frac{100000}{62}\rceil=1613\) 个页面。
Dense Index 需要 \(i=ceil(\frac{r}{c_i})=\lceil\frac{100000}{1020}\rceil=99\) 个页面
Sparse Index 需要 \(i=ceil(\frac{b}{c_i})\lceil\frac{1613}{1020}\rceil=2\) 个页面
Primary Index 中的选择
对于 One Typle Query,伪代码如下:
ix = binary search index for entry with key K
if nothing found { return NotFound }
b = getPage(pageOf(ix.tid))
t = getTuple(b,offsetOf(ix.tid))
– may require reading overflow pages
return t
成本分析:最坏情况情况就是读 \(log_2i\) 个索引文件,加上读一个页面和它的所有溢出页面。
假设索引文件的页面大小等于数据文件的页面大小,所以两者读取页面的成本相同。因此,最终成本为 \(Cost_{one,prim}=log_2i+1+Ov\)
对于 Range Query,其大致思路为:
- 使用索引进行查找,找到下界
- 顺序读取索引,直到找到上界
- 累计一组要检查的 Bucket
- 检查每个 Bucket 以找到匹配的元组
伪代码如下:
// e.g. select * from R where a between lo and hi
pages = {} results = {}
ixPage = findIndexPage(R.ixf,lo)
while (ixTup = getNextIndexTuple(R.ixf)) {
if (ixTup.key > hi) break;
pages = pages ∪ pageOf(ixTup.tid)
}
foreach pid in pages {
// scan data page plus ovflow chain
while (buf = getPage(R.datf,pid)) {
foreach tuple T in buf {
if (lo<=T.a && T.a<=hi)
results = results ∪ T
} } }
对于 Partial Match Retrieve,其操作和 One Type Query 基本一致。 如果一个查询不涉及主键,那么此时索引不会带来任何帮助,只能线性扫描整个数据文件。
Primary Index 中的插入
大致流程:首先将元组插入到合适的页面 P 的位置上,得到该元组的 ID,之后在索引文件中找到新实体的合适位置,将新的索引实体 \((k, tid)\) 插入到该位置。伪代码如下:
tid = insert tuple into page P at position p
find location for new entry in index file
insert new index entry (k,tid) into index file
这里存在一个重要的问题就是插入索引实体后,要保持索引实体的顺序不被打破。可以在索引文件中引入溢出页面,或者将插入位置之后的索引实体往后移动。后者重新排列的方法平均需要读/写一般的索引页面。其成本为:\(Cost_{insert,prim}=(log_2i)_r+\frac{i}{2}(1_r+1_w)+(1+Ov)_r+(1+\delta)_w\)
- \((log_2i)_r\):使用二分查找找到新的索引实体应该被放置的索引页面的成本
- \(\frac{i}{2}(1_r+1_w)\):重新排列所需的读/写一半的索引页面的成本
- \((1+Ov)_r\):读取对应数据页面及其溢出页面以找到合适的插入位置的成本
- \((1+\delta)_w\) :将更新后的页面写回磁盘的成本。这里的 \(\delta\) 可以是 \(0、1、1 + Ov\)
Primary Index 中的删除
大致流程:首先需要使用索引找到目标元组,之后将该元组标记为 “已删除”,最后将索引文件中对应该元组的索引实体删除。伪代码如下:
find tuple using index
mark tuple as deleted
delete index entry for tuple
而在删除索引实体时,同样也有两种选择,一个是进行标记,另一个就是进行重排。这两者的成本分别为:
- 标记:\(Cost_{delete,prim}=(log_2i)_r+(1+Ov)_r+1_w+1_w\)
- 重排:\(Cost_{delete,prim}=(log_2i)_r+(1+Ov)_r+\frac{i}{2}(1_r+1_w)+1_w\)
Clustering Index
数据文件是排序的,每个键值对应一个索引实体。
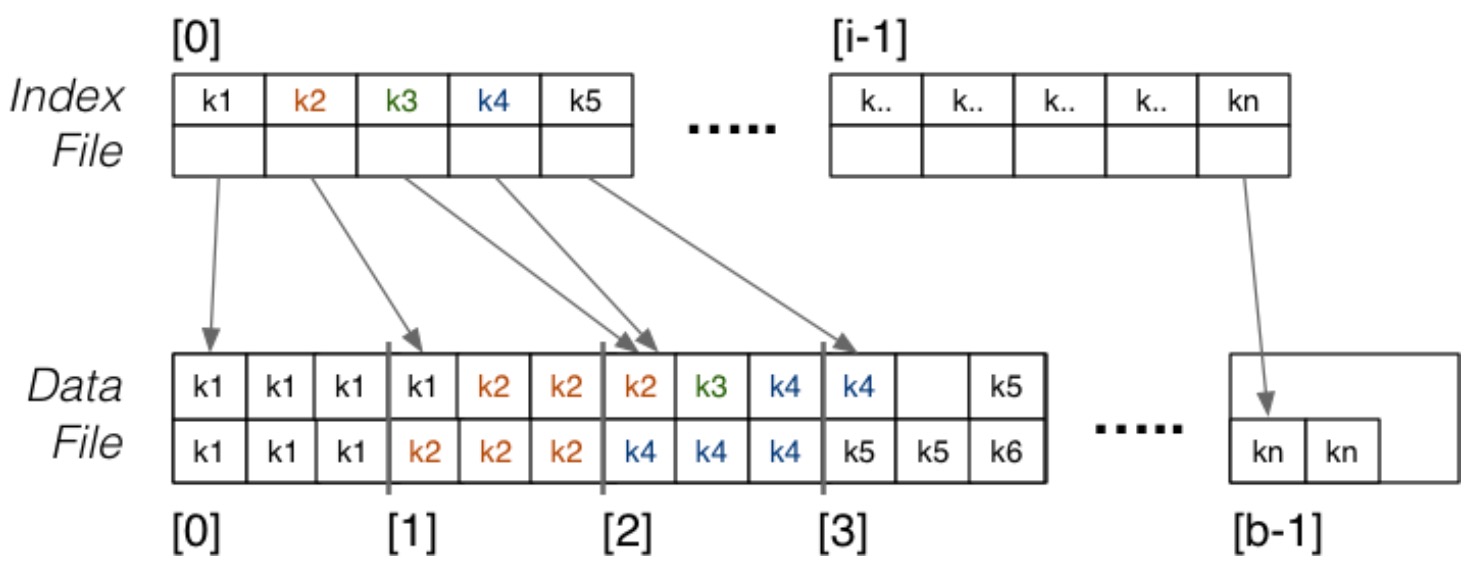
此时的索引不再基于主键。因此,此时的属性 A 会有重复的取值,索引文件中的每个实体只会指向重复取值的第一个页面。
此时的删除操作需要格外注意,因为具备相同键值的元组会有多个,因此必须等所有这些元组都被删除后,才能把索引文件中的对应索引实体删除。
Secondary Index
数据文件不是顺序的,同时属性 A 也不是主键。
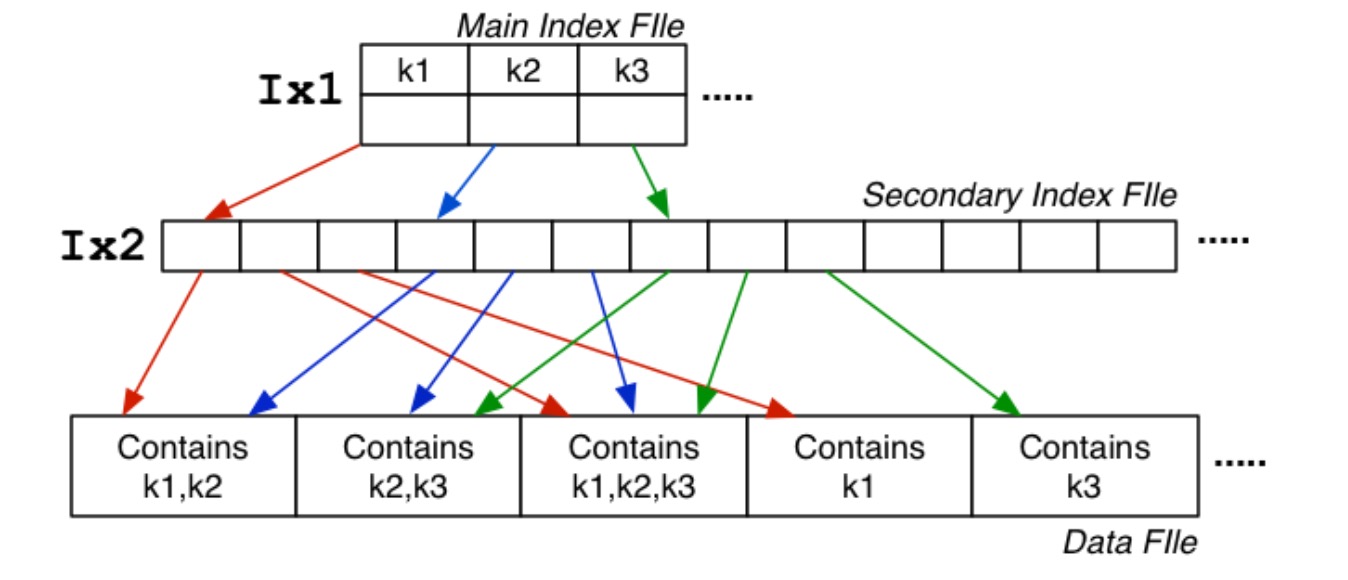
在上图中属性 A 有三种不同的取值,Main Index File 是这三种取值的索引,而 Secondary Index 则更进一步,对这三种取值的具体元组进行索引,在 3 个不同页面中具有 k1 取值的元组被 Secondary Index 索引了(红色)。 所以,当我们查询元组时,需要先搜索 Main Index File,然后再根据 Secondary Index 去找到元组的具体位置。其代价为:\(Cost_{pmr}=log_2i_{ix1}+a_{ix2}+b_q(1+Ov)\)
- \(log_2i_{ix1}\):在 Main Index 中进行二分法搜索的成本
- \(a_{ix2}\):在 Secondary Index 的连续页面中线性搜索的成本
- \(b_q(1+Ov)\): 数据文件中那些包含目标元组的页面及其溢出页面搜索的成本
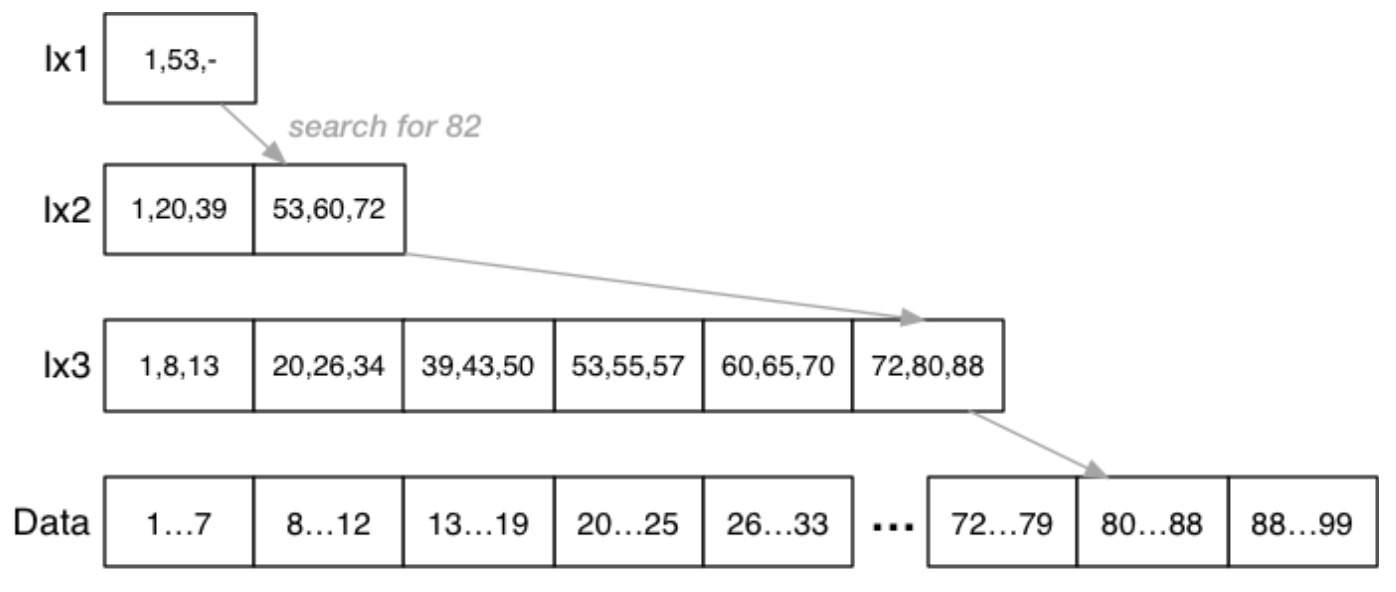
Multi-level Indexes
Secondary Index 使用两个索引文件可以提升搜索的效率,其中 \(b_{ix1} << b_{ix2} << b\)。这种方法还可以进一步提升。比如,可以把 \(ix1\) 变为 Sparse Index,因为 \(ix2\) 一定是有序的,此时 \(b_{ix1} = \lceil(\frac{b_{ix2}}{c_i})\rceil\)。Secondary index 是 Multi-level Index 的基本形式,可以增加更多的索引文件,但是一定要保证最顶层的索引是最小的,极限情况下,顶层索引可以只有一个页面,以下是一个三层索引的例子:
Multi-level Indexes 的选择
对于 One Type Query,其伪代码如下:
xpid = top level index page
for level = 1 to d {
read index entry xpid
search index page for J'th entry
where index[J].key <= K < index[J+1].key
if (J == -1) { return NotFound }
xpid = index[J].page
}
pid = xpid // pid is data page index
search page pid and its overflow pages
成本分析:\(Cost_{one,mli}=(d+1+Ov)_r\),这里的 \(d=\lceil log_{c_i}r\rceil\),因为索引实体所占空间很小,索引 \(c_i\) 很大。
B-Trees
B 树简介
B 树是一个具有以下属性的多路搜索树:
- 它们进行更新时仍保持平衡
- 每个节点中至少有 \(\frac{n-1}{2}\) 个实体
- 每个树节点占据一整个磁盘页面
B 树插入和删除操作可以被很高效地实现,但是描述起来比较复杂。B 树相对于普通的多路搜索树具有以下优点:
- 更好的存储利用率(约有 \(\frac{2}{3}\) 是满的)
- 最坏情况下有更好的表现(树不高)
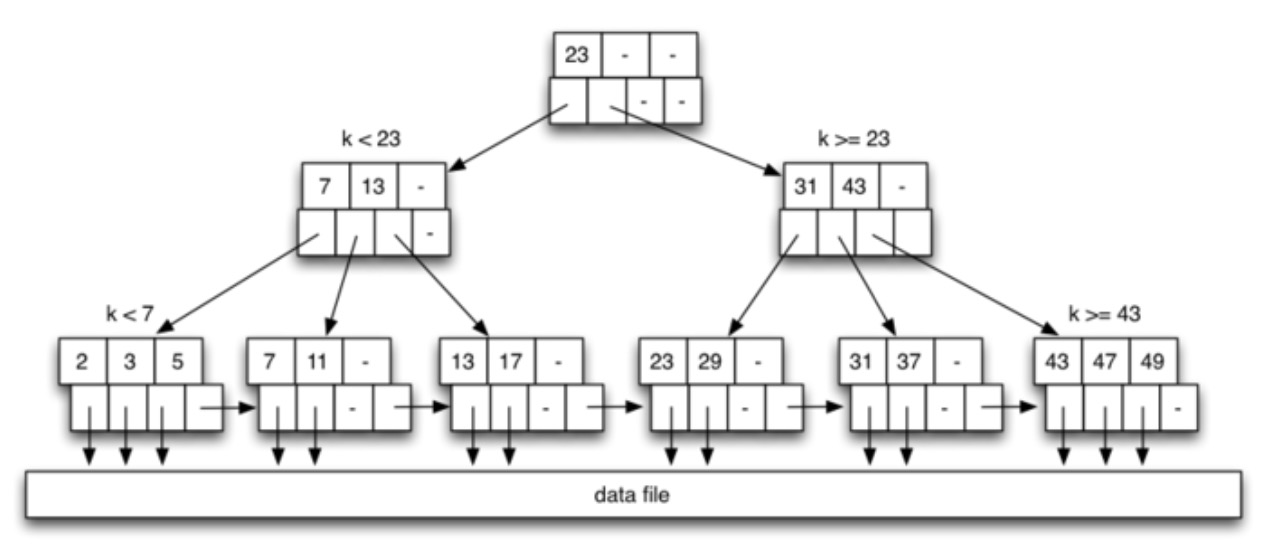
以下是 B 树的一个例子 \(depth=3,n=3\),实际上是 B+ 树,与一般的 B 树不同的地方在于,B+树仅有左节点可以与数据页交互,而 B 树中的所有节点都可以与数据页交互:
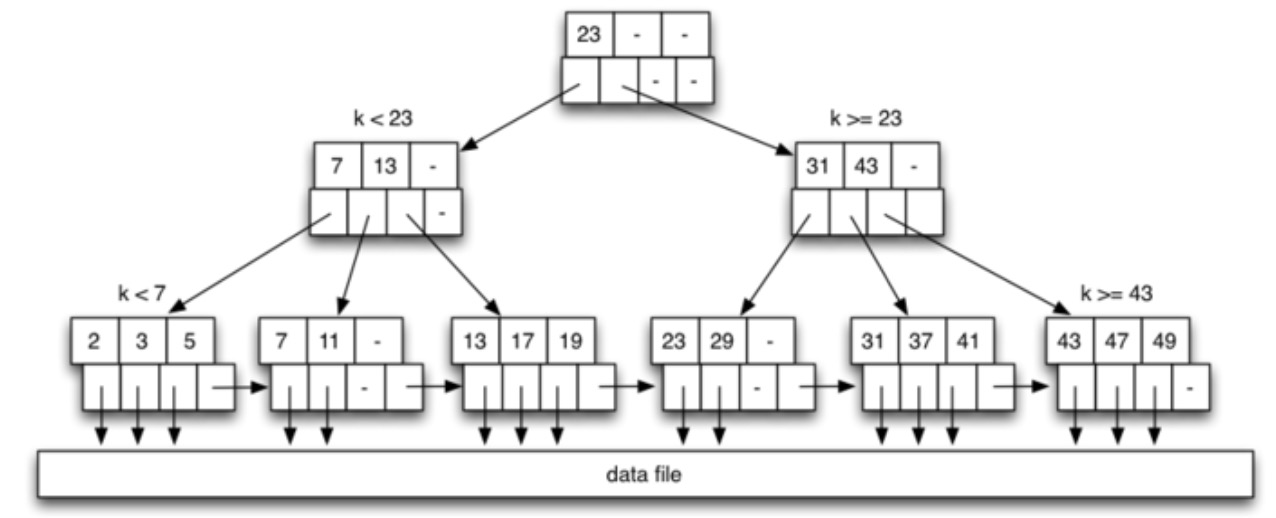
每个节点中,上半部分是键,下半部分是指针,根据条件指向不同的节点。在数据库中,节点就是页面。
B 树的深度
树的深度取决于有效的分支因子,即每个节点的满载程度。研究表明,一般的 B 树节点满载程度为 69% 左右。所以,负载 \(L_i=0.69*c_i\),树的深度约为 \(\lceil log_{L_i}r\rceil\)。
B 树选择
对于 One Type Query,使用 B 树进行搜索只需要从根节点开始向下搜索,直到在某个叶节点找到满足要求的结果。其伪代码如下:
N = B-tree root node
while (N is not a leaf node)
N = scanToFindChild(N,K)
tid = scanToFindEntry(N,K)
access tuple T using tid
成本为 \(Cost_{one}=(D+1)_r\)
对于 Range Query,对范围的下界进行树搜索,再得到某个叶节点之后,通过叶节点之间的联系(指针)向后继续搜索,直到找到上界。其伪代码如下:
search index to find leaf node for Lo
for each leaf node entry until Hi found {
access tuple T using tid from entry
}
成本为 \(Cost_{one}=(D+b_i+b_q)_r\)
举个例子,现在执行 SELECT * FROM Relation r WHERE r.id ≥ 11 AND r.id < 25;,此时的 B 树如下所示:
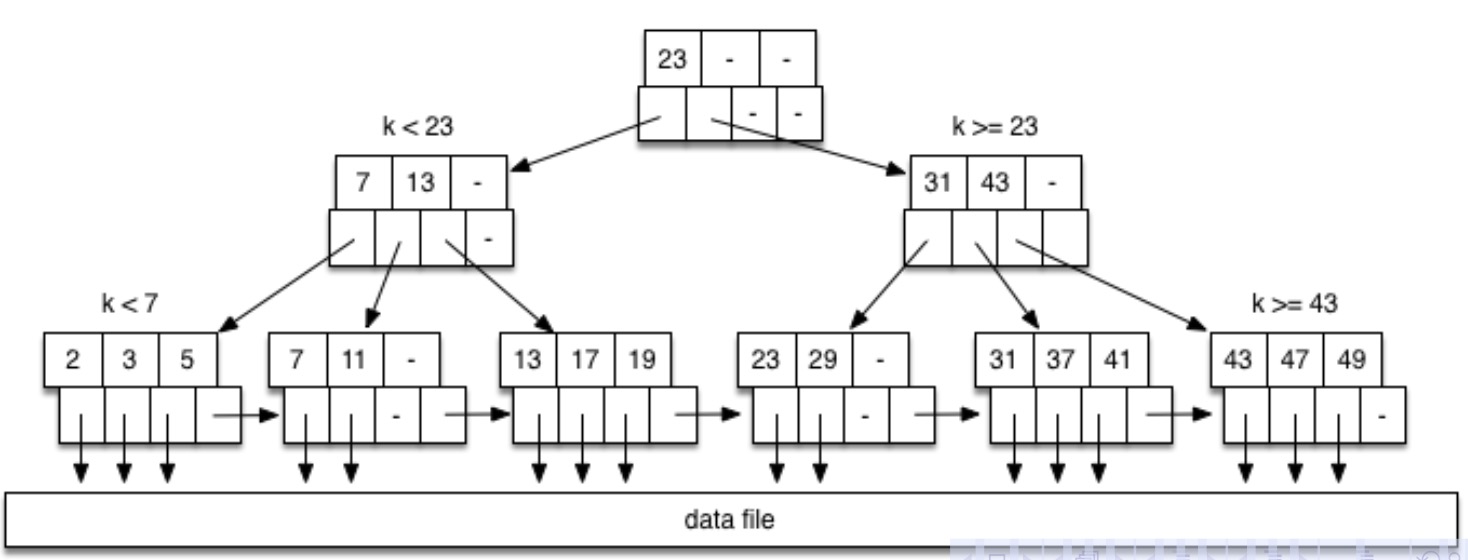
先搜索下界 11,此时到达第二个叶节点,在其中找到 11 之后,向后继续搜索下一个(右边)的叶节点,直到找到上界(第四个叶节点)。
B 树的插入
插入的大致流程:
- 找到合适的叶节点和该叶节点中适合存放新键值的位置
- 如果该节点未满,就直接将新键值插入
- 如果该节点已满:
- 将中间元素提升为父元素
- 把该节点分割为两个半满节点
- 把新键值插入到合适的半满节点中
- 如果父节点也满了,那就继续分割,向上操作(同上)
- 如果已经到了根节点,并且根节点也没有空闲的位置了,那就向上创建一个新的根节点
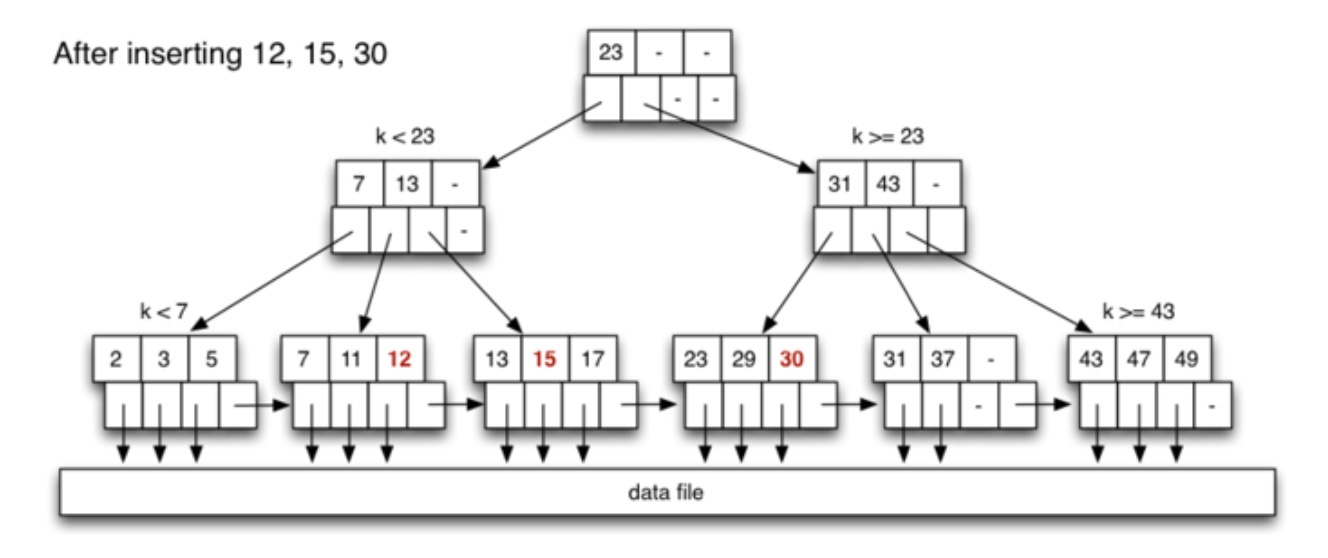
例子:在下图的 B 树中插入 12, 15, 30, 10:
首先插入 12,从根节点开始搜索,找到第 2 个叶节点,该节点存在空闲空间,所以直接将 12 插入。接这插入 15,找到第 3 个叶节点,该节点存在空闲空间,所以直接将 15 插入,为了保证索引页面(节点)中的顺序不被打破,将其插入在 13 和 17 之间。再接着插入 30,找到第四个叶节点,该节点存在空闲空间,所以直接将 30 插入。插入前三个数之后,B 树如下所示:
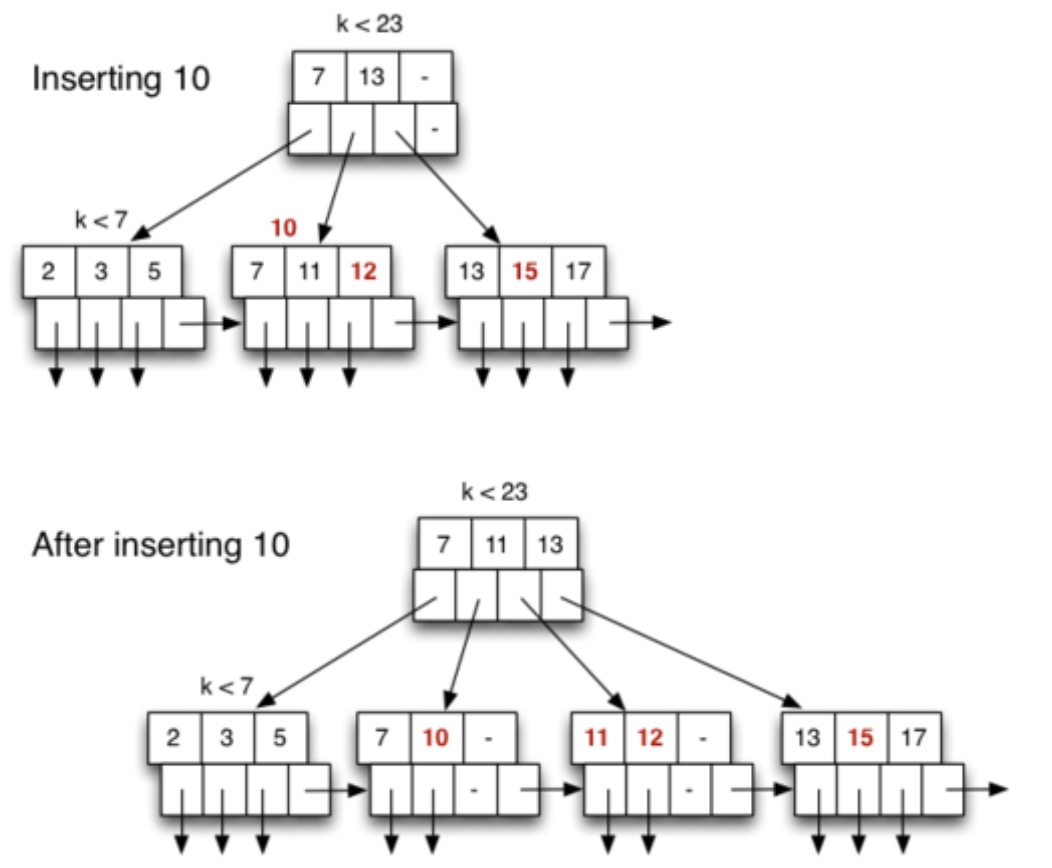
最后插入 10,同样先找到合适的叶节点,第 2 个叶节点,此时该节点已经满了,因此需要进行分割。将该节点中的中间元素 11 写到父节点中,并将叶节点划分会两个叶节点,如下所示:
成本分析:\(Cost=Cost_{treeSearch}+Cost_{treeInsert}+Cost_{dataInsert}\)
最好的情况:只需要写一个页面,也就是从根节点找到叶节点后,有空闲的位置。其成本为 \(Cost_{insert}=D_r+1_w+1_r+1_w\)
一般的情况:3 个节点需要写(两个半满节点+一个父节点),也就是从根节点开始遍历,把遍历的节点保存在缓冲区中,找到叶节点后,先读/写数据页面,再更新/写叶节点和父节点。其成本为 \(Cost_{insert}=D_r+3_w+1_r+1_w\)
最坏的情况:有 \(2D-1\) 个节点需要写(传播到根节点),也就是从根节点遍历到叶节点,读/写数据页面。更新/写叶节点和父节点,重复该操作 \(D-1\) 次。其成本为 \(Cost_{insert}=D_r+3D_w+1_r+1_w\),优化后的成本为 \(Cost_{insert}=D_r+(2D-1)_w+1_r+1_w\)
PostgreSQL 中的 B 树
PostgreSQL 中的 B 树叫作 Lehman/Yao-style B-trees。是一个能在高并发环境下高效工作的变体。
- 实现在
backend/access/nbtree目录下 - 存储所有相等键的实例(dense index)
- 在键等于页面中的最大键时进行右侧扫描以避免分裂
- 常见的插入情况是新键是整个数据结构中的最大键,可以高效地处理
在 PostgreSQL 版本 12 中有以下变化:
- 索引实体更小:为了复合键,只存储第一个属性,索引实体更小,因此 \(c_i\) 更大,因此树更浅。
- 在索引键中包含 TID:重复的索引条目按照“表顺序”存储,这使得扫描表文件以收集结果更有效。
N-dimensional Queries
多维查询简介
一维查询,例如 select * from R where a = K; 和 select * from R where a between Lo and Hi;,堆、哈希、索引都可作为高效实现的方式。
而多维查询通常会产生更少的结果,需要考虑更多的信息,成本也更高。
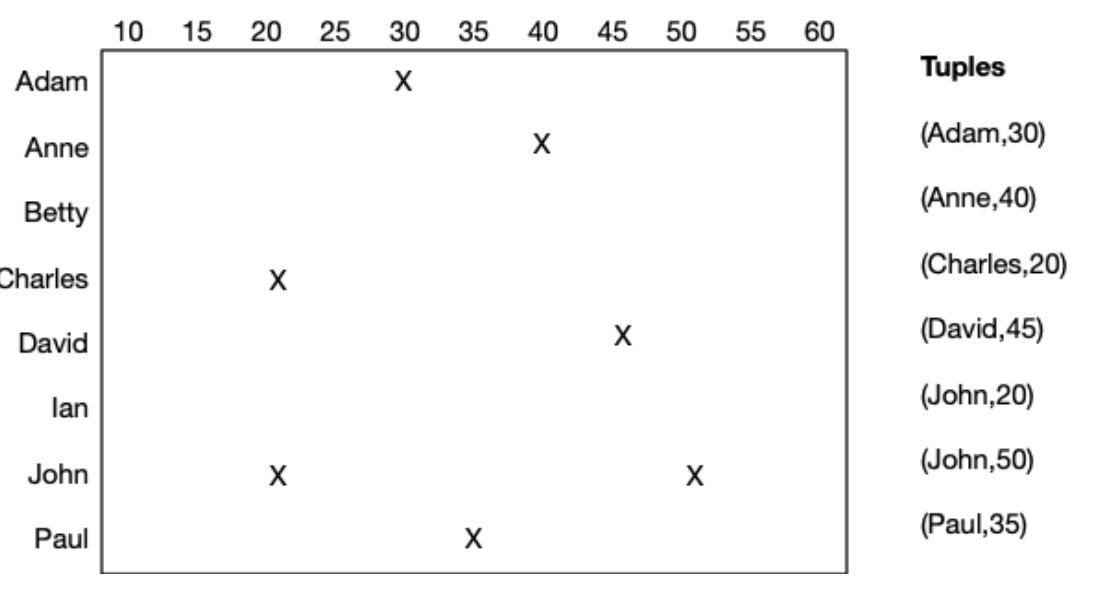
假设有一张如下的关系表:
create table Rel (
X char(256),
Y integer
);
# 样例元组就有:
# R(‘Adam’,30) R(‘Anne’,40) R(‘Charles’,20) R(‘David’,45)
# R(‘John’,20) R(‘John’,50) R(‘Paul’,35)
由上面的关系表可以得到元组空间,如下所示:
多维查询就是选择的条件中存在多余一个以上的属性,它又分为两种类型:
- Partial-Match Retrieval(PMR):
select * from Person where name = ’John’ and age = 50; - Tuple-Space Queries(Space):
select * from Person where 20 ≤ age ≤ 50 and ’Charles’ ≤ name ≤ ’John’
通过 Heap 实现多维查询
对于 Heap file 可以通过标准方法来处理 PMR 和 Space 查询。其伪代码如下:
// select * from R where C
r = openRelation(”R”,READ);
for (p = 0; p < nPages(r); p++) {
buf = getPage(file(r), p);
for (i = 0; i < nTuples(buf); i++) {
t = getTuple(buf,i);
if (matches(t,C))
add t to result set
}
}
这种方法都是将数据页面按顺序都遍历了一遍,所以对两类查询的成本都一样 \(Cost_{pmr}=Cost_{space}=b\)。
通过 Multiple Indexes 实现多维查询
现在的数据库管理系统已经支持对一张表建立多个索引了。要构建哪些索引取决于查询。
create table R (a int, b int, c int);
create index Rax on R (a);
create index Rbx on R (b);
create index Rcx on R (c);
create index Rabx on R (a,b);
create index Racx on R (a,c);
create index Rbcx on R (b,c);
create index Rallx on R (a,b,c);
但是多个索引就需要更多的空间,以及数据更新时对索引的维护成本。
从广义角度来看,PMR 和 Space 查询就等价于以下 SQL:
select * from R
where a1 op1 C1 and...and an opn Cn;
- PMR:\(op_i\) 为等于
- Space:\(op_i\) 为范围
除了广义角度,对于多维查询还有以下可行的方法:
- 对某一个属性 \(a_i\) 建立索引,减少元组测试
- 对所有属性都建立索引,结果就是他们的交叉集
如果只使用一个索引,应该选择索引 \(a_i\),经过 ai opi Ci 条件可以得到匹配的元组数量最少。
- 假设 \(a_i\) 属性值在其范围内是均匀分布的
- 主键的相等测试最多给出一个匹配
- 如果 \(a_i\) 属性值的范围是最广的,那么对于相等测试,其匹配的结果数量最少
- 如果 \(a_i\) 属性值的范围是最广的,那么对于范围测试,其匹配的结果数量最多
只使用一个索引的查询伪代码如下:
// Query:select*fromRwhere a1 op1 C1 and ... and an opn Cn;
// 假设对 ai 建立索引最好
TupleIDs = IndexLookup(R,ai,opi,Ci)
//gives{ tid1 , tid2 ,...} for tuples satisfying ai opi Ci
PageIDs = { }
foreach tid in TupleIDs
{ PageIDs = PageIDs ∪ {pageOf(tid)} }
// PageIDs = a set of b q ix page numbers ...
其成本为 \(Cost=Cost_{index}+b_{q_{ix}}\),根据某个条件得到的结果页面集中有些页面不包含最终答案,因此 \(b_{q_{ix}}>b_q\),DBMS 通常维护统计数据,以帮助确定选择哪个属性建立索引。
使用多个索引的查询伪代码如下:
// Query:select*fromRwhere a1 op1 C1 and...and an opn Cn;
// 假设 ai 是下标最小的一个索引
TupleIDs = IndexLookup(R,a1,op1,C1)
foreach attribute ai with an index {
tids = IndexLookup(R,ai,opi,Ci)
TupleIDs = TupleIDs ∩ tids
}
PageIDs = { }
foreach tid in TupleIDs
{ PageIDs = PageIDs ∪ {pageOf(tid)} }
// PageIDs = a set of b q page numbers
其成本为 \(Cost=kCost_{index}+b_q\),这里的 \(k\) 就是索引的数量。
练习
现在有一张关系表,\(r=100000,B=4096\),关系表的模式如下:
create table Students (
id integer primary key,
name char(10), – simplified
gender char(1), – ’m’,’f’,’?’
birthday char(5) – ’MM-DD’
);
- 数据文件没有按照任意一个属性进行排序
- 对每一个属性都有一个 dense index
- 每一个数据页面或者索引页面的头部信息都占 \(96\) 字节
问题 1:计算数据文件和每个索引文件的大小
id:整数类型,为 4 个字节name:字符类型,长度为 10 个字符,每个字符通常占用 1 个字节,共 10 个字节gender:共 1 个字节birthday:共 5 个字节
因此一个元组占 20 个字节。一个页面 4096 字节,去掉头部信息的 96 个字节,剩余 4000 个字节,可以存储 \frac{4000}{20}=200 个元组。因此数据文件有 \(\frac{100000}{200}=500\) 个页面,总大小为 \(500*4096=2048000\) 字节。
id 属性的索引:该属性为 4 个字节,因此索引实体为 4 字节,一个索引页面可以存储 \(\frac{4000}{4}=1000\) 个索引元组,需要 \(\frac{100000}{1000}=100\) 个页面,因此该索引文件的总大小为 \(100*4096=409600\) 字节。
其他属性同上,不再赘述,(不确定索引实体是否直接等于属性的大小,因为没有多余的信息)。
问题 2:描述每个属性的选择性
对于相等测试:\(id>name>birthday>gender\)
对于范围测试:\(id<name<birthday<gender\)
问题 3:现在执行 select * from Students where name=’John’ and birthday=’04-01’; SQL 语句,估计使用不同索引的成本。
- 只使用
name索引,其成本为 \(Cost=Cost_{nameIndex}+b_{q_{John}}\) - 只使用
birthday索引,其成本为 \(Cost=Cost_{birthdayIndex}+b_{q_{04-01}}\) - 同时使用上面两个索引,其成本为 \(Cost=Cost_{nameIndex}+Cost_{birthdayIndex}+b_q\)
Bitmap Indexes
Bitmap Indexes 的介绍
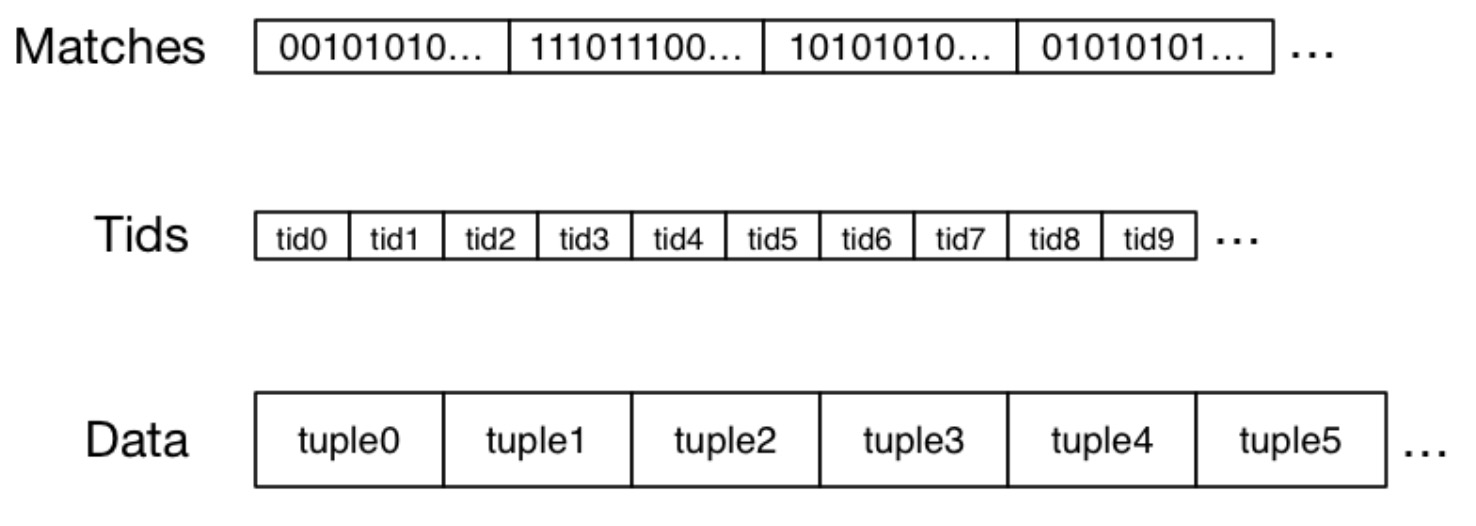
还有一种索引结构就是 Bitmap Indexes,它只专注于一组元组:
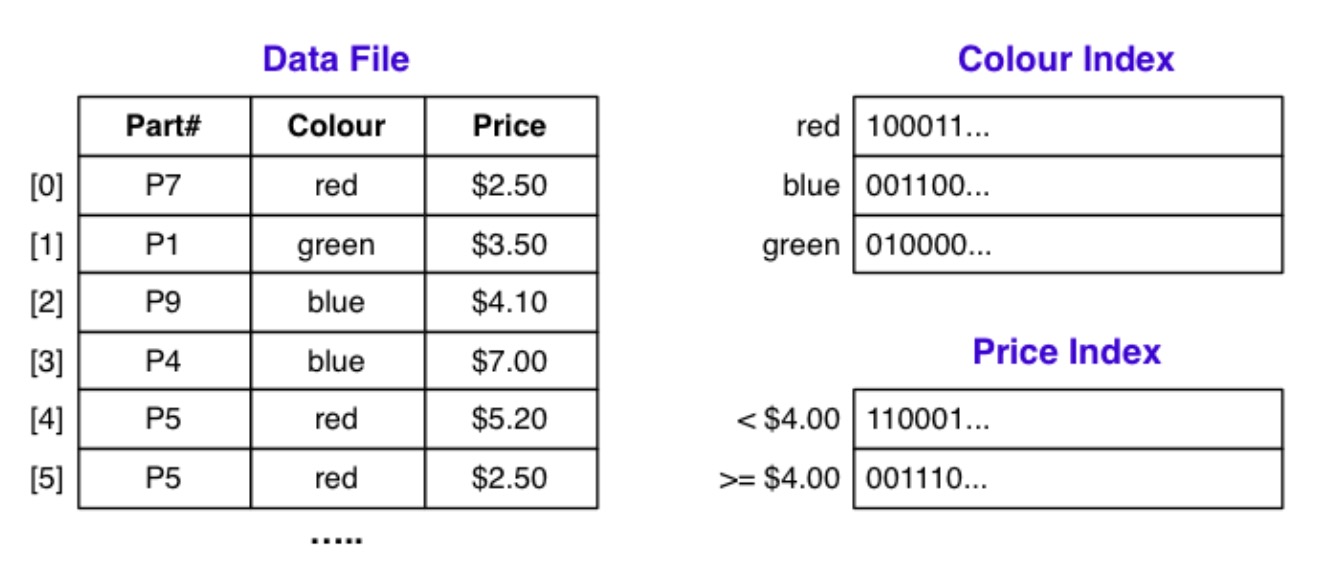
索引实体包含 \(r\) 比特的比特字符串,因为有 \(r\) 个元组,以颜色索引中 red 实体,其值为 \(100011..\),这就表示第一个元组的颜色为红色,第二个不是红色,以此类推。还有一个 tids 文件,对应于每一个元组:
使用 bitmap index 进行查询的伪代码如下:
Matches = AllOnes(r) // 将所有位设置为1,表示初始阶段元组都”符合“
foreach attribute A with index {
// 根据与WHERE子句中A相关联的值选择第i个位串(即Bitmaps[A][i])
// 并将其与Matches进行按位与操作。这将导致Matches中只有满足所有WHERE条件的元组对应的位被设置为1。
Matches = Matches & Bitmaps[A][i]
}
// 通过遍历0到r-1的索引i,检查Matches中的每个元素,如果为0,则跳过该元素。
foreach i in 0..r-1 {
if (Matches[i] == 0) continue;
Pages = Pages ∪ {pageOf(Tids[i])}
}
foreach pid in Pages {
P = getPage(pid)
extract matching tuples from P
}
位图索引的存储成本:
- 每个索引属性的每个值/范围的一个位图
- 每个位图都有长度 \(\lceil\frac{r}{8}\rceil\)c 个字节
位图索引的查询执行成本:
- 为查询中的每个索引属性读取一个位图
- 按位与操作(在内存中执行)
- 读取包含匹配元组的页面
位图可以索引页面,不一定非要元组,这样形成的位图更小。
练习
文件结构如下所示:
问题:以下查询是如何进行的?
我以前 6 个元组进行说明,最开始 Matches=111111
select * from Parts where colour=’red’ and price < 4.00;:首先将Matches与红色的索引值进行按位与操作,得到结果 \(100011\),然后将这个中间结果与价格小于 4 的索引值进行按位与操作,即100011 & 110001 = 100001,这就表示第一个元组和第六个元组是符合查询的。select * from Parts where colour=’green’ or colour =’blue’;:简单来说就是111111 & 010000 = 010000,111111 & 001100 = 001100,前者符合条件的是第二个元组,将其加入到结果集中,后者符合条件的是第三和第四个元组,由于是或操作,就将两个结果集合进行并操作。
Hashing for N-d Selection
MA.Hashing
对于 PMR 查询 select * from R where a1=C1 and...and an=Cn;来说:
- 如果某个属性
ai是哈希键,那么查询会非常高效 - 如果某个属性
ai不是哈希键,那么就需要线性遍历
因此,我们可以使用多属性哈希(mah)来提高效率。首先,形成一个包含所有属性的复合哈希值,然后在查询时,复合哈希的某些组件是已知的,这就允许我们缩小要检查的页面数量。MA.hashing 与任何动态哈希方案配合使用。
MA.hashing 参数:
- 文件大小 \(b=2^d\) 个页面,所以使用 \(d\) 比特的哈希值
- 关系有 \(n\) 个属性:\(a_1,...,a_n\)
- 属性 \(a_i\) 的哈希函数是 \(h_i\)
- 属性 \(a_i\) 贡献了 \(d_i\) 位(构成哈希值)
- 总共比特数 \(d=\sum_{i=1}^nd_i\)
- 一个选择向量声明了 k 位哈希值,我们需要知道其中每一部分的地址
MA.hashing 的例子
有一个关系 Deposit(branch,acctNo,name,amount),假设一个包含 8 个主要数据页(加上溢出页面)的小数据文件。哈希参数 \(d=3,d_1=1,d_2=1,d_3=1,d_4=0\),这里忽略了 amount 属性,因为没有人会问 select * from Deposit where amount=533 这样的查询。
选择向量:

这个选择向量可以告诉我们以下信息:
- 哈希值中的 bit 0 来自 \(hash_1(d_1)\) 的 bit 0
- 哈希值中的 bit 1 来自 \(hash_2(d_2)\) 的 bit 0
- 哈希值中的 bit 2 来自 \(hash_3(d_3)\) 的 bit 0
- 哈希值中的 bit 3 来自 \(hash_1(d_1)\) 的 bit 1
- 以此类推
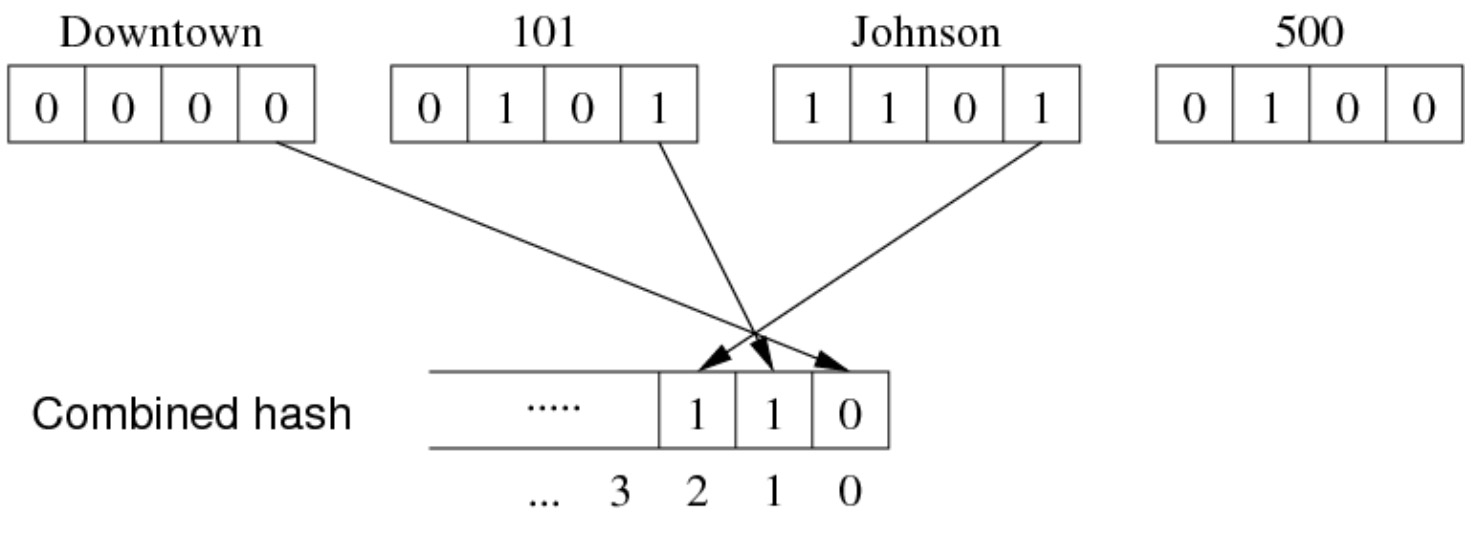
考虑一下这个元组:

复合哈希值(页面地址)的计算如下:
MA.Hashing 哈希函数
一些辅助定义:
# define MaxHashSize 32
typedef unsigned int HashVal;
// 提取哈希值第i比特
#define bit(i,h) (((h) & (1 << (i))) >> (i))
// 选择向量的元素
typedef struct { int attr, int bit } CVelem;
typedef CVelem ChoiceVec[MaxHashSize];
// 对单个属性的哈希函数
HashVal hash_any(char *val) { ... }
为元组 t 生成组合 d 比特的哈希值:
HashVal hash(Tuple t, ChoiceVec cv, int d)
{
HashVal h[nAttr(t)+1]; // 用于存储每个属性的哈希值
int i,a,b;
for (i = 1; i <= nAttr(t); i++)
h[i] = hash_any(attrVal(t,i)); // 对每个属性值进行哈希计算
for (i = 0; i < d; i++) {
a = cv[i].attr; // 从选择向量中获取属性索引
b = cv[i].bit; // 从选择向量中获取位索引
oneBit = bit(b, h[a]); // 从属性的哈希值h[a]中提取第b位的值
res = res | (oneBit << i); // 将每个选择向量元素的oneBit值合并为最终的哈希值res
}
return res;
}
练习:使用 MA.Hashing 的哈希函数计算元组 (’John Smith’,’BSc(CompSci)’,1990,99.5) 的哈希值。
-
哈希参数 \(d=6,d_1=3,d_2=2,d_3=1\)
-
选择向量为 \(cv=<(1,0),(1,1),(2,0),(3,0),(1,2),(2,1),(3,1),(1,3)...>\)
-
\(hash_1(’John Smith’)=...0101010110110100\)
-
\(hash_2(’BSc(CompSci)’)=...1011111101101111\)
-
\(hash_3(1990)=...0001001011000000\)
选择向量第一个元素是 \((1,0)\) 表示选择第一个属性的哈希值的第 0 位,也就是 \(hash_1(’John Smith’)=...0101010110110100\) 中的 0。以此类推元组的哈希值为 \(110100\)
MA.Hashing 查询
对于 Partial Match Query,我们知道一部分属性的值,但是还有一部分未知。比如:
select amount
from Deposit
where branch = ’Brighton’ and name = ’Green’l;
此时我们知道 (Brighton, ?, Green, ?)。为了解决这类问题,我们首先来看一个更简单的问题:
select amount from Deposit where name=‘Green’;
此时我们只知道属性 name 的值为 Green,但是根据前面所说,我们需要构建一个复合哈希值,因此就有:
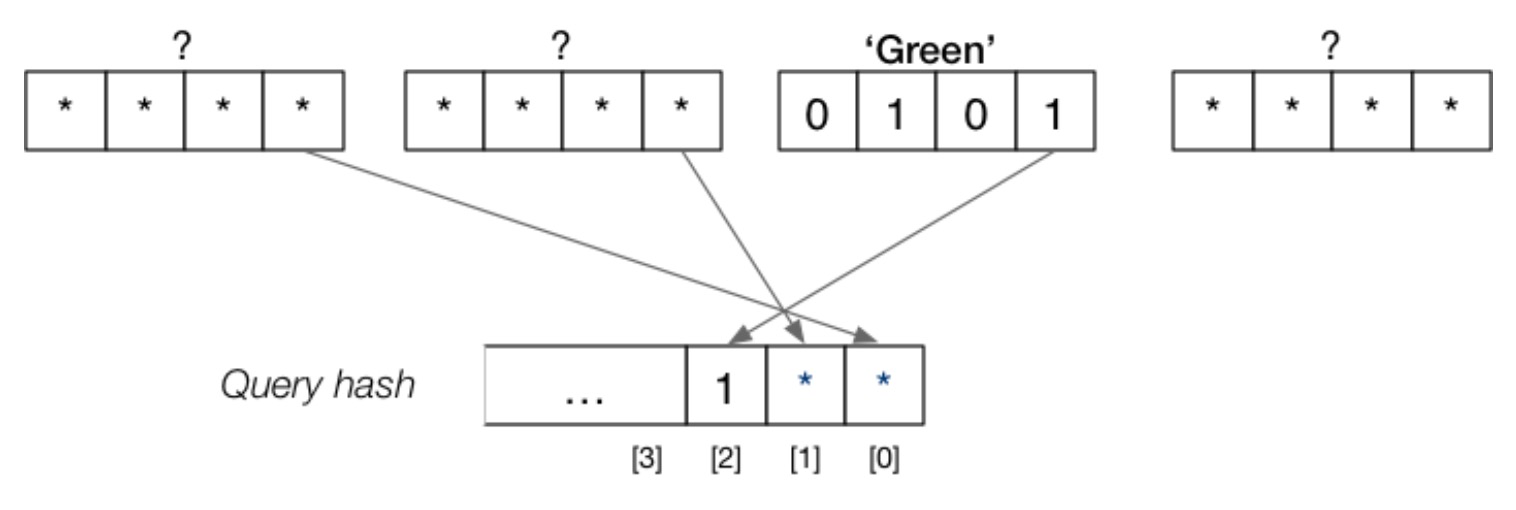
我们只知道复合哈希值的第 3 位是 1,因此,匹配的元组一定在 \(100,101,110,111\) 这几个页面中。
练习:\((a,b,c),(?,b,c),(a,?,?),(?,?,?)\) 这几个查询的部份哈希是什么?
- \(d=6,b=2^6,cv=<(0,0),(0,1),(1,0),(2,0),(1,1),(0,2),...>\)
- \(h(a)=...00101101001101\)
- \(h(b)=...00101101001101\)
- \(h(c)=...00101101001101\)
对于 \((a,b,c)\) 查询,哈希值为 \(101101\)
对于 \((?,b,c)\) 查询,哈希值为 \(*011**\)
对于 \((a,?,?)\) 查询,哈希值为 \(1***01\)
对于 \((?,?,?)\) 查询,哈希值为 \(******\)
MA.Hashing 查询算法的代码如下:
// 根据查询条件构建一个部分哈希值,并使用该部分哈希值找到候选页面。
// Treats query like tuple with some attr values missing
nstars = 0;
for each attribute i in query Q { // 遍历查询Q的每个属性i
// 如果查询Q具有该属性的值(即属性值不为空),则使用选择向量和哈希函数计算属性值的哈希值,并将结果设置到组合哈希值中的相应位置。
if (hasValue(Q,i)) {
set d[i] bits in composite hash
using choice vector and hash(Q,i)
} else { // 如果查询Q缺少属性i的值(即属性值为空),则将相应位置的组合哈希值设置为*字符,并通过变量nstars跟踪字符的数量。
set d[i] *’s in composite hash
using choice vector
nstars += d[i]
}
}
...
// 使用部分哈希值找到候选页面
r = openRelation(”R”,READ);
// 每次迭代时,将组合哈希值中的*字符替换为特定的值
for (i = 0; i < 2nstars; i++) {
P = composite hash
replace *’s in P
using i and choice vector
// 从关系R的文件中读取页面Buf,并对Buf中的每个元组T进行遍历。
Buf = readPage(file(r), P);
for each tuple T in Buf {
if (T satisfies pmr query)
add T to results
}
}
练习:将未知信息重新表示,MA.Hashing 引入了第三个值 \(*\),这个符号表示未知。对于得到的复合哈希值 \(1011*1*0**010\) 如何进行还原?
使用枚举的方法,四个位置未知,每个位置有两种情况,因此,共 \(2^4=16\) 种情况。
成本分析
MA.Hashing 可以处理多种不同的查询,一个有 n 个属性的关系有 \(2^n\) 种不同的查询,而这些不同的查询就会有不同的代价:\(Cost(Q)=2^s\),这里的 \(s=\sum_{i\notin Q}d_i\)。
查询分布可以大大帮助我们提升查询效率,所谓的查询分布会给出提出每种查询的概率 \(P_Q\)。可以用一个例子来看,假设对于某个关系有以下几种查询:
select * from R where a=1;
select * from R where d=2;
select * from R where b=3 and c=4;
select * from R where a=5 and b=6 and c=7;
其中第一种比较常见,而第三种比较少见,那么在复合哈希值中就可以给属性 a 更多的比特位,而后两种更少的比特位。现在来看具体的代价:
- 如果所有的属性值都已知,那么 \(MinCost_{pmr}=1\)
- 如果所有的属性值都未知,那么 \(MaxCost_{pmr}=2^d=b\)
- 平均代价为所有查询类型的加权求和,\(AvgCost_{pmr}=\sum_{P_Q}\prod_{i\notin Q}2^{d_i}\)
除了上述的查询分布,还有其他方法来优化多属性查询效率:
- Attribute Domain 的规模,比如一个属性的取值只有 4 个,那么就不会给他安排多于 2 个 bits
- Discriminatory Power,如果某个属性比其他属性更具辨识度,即取值更加不重复,那么就给他分配更多的 bits

 浙公网安备 33010602011771号
浙公网安备 33010602011771号