数据库内核:PostgreSQL 关系操作与评估2
选择(Selection)
选择:select * from R where C,从一个关系 R 中过滤元组,得到符合条件 C 的子集。
选择操作根据选择条件可以分为三大类:
- 1-d:一维的,也就是选择条件只基于一个属性
- n-d:多维的,也就是选择条件基于多个属性
- similarity:近似匹配或者带有排序的
假设 \(r_q\) 为 匹配查询 q 的元组的数量,\(b_q\) 为包含匹配查询 q 的元组的页面的数量。选择有多种不同的策略:
- One Type Query:返回的结果至多只有一个,即 \(r_q = b_q = 1\)。例如
select * from R where id = 1234;。 - Partial Match Retrieve:基于单个或多个条件返回多个结果元组,即 \(0 \leq r_q \leq r, 0 \leq b_q \leq b+b_{ov}\)。例如
select * from R where age=65; (1-d)和select * from R where age=65 and gender=’m’; (n-d)。 - Range Queries:此时不再基于等性测试条件,而是基于范围,即 \(0 \leq r_q \leq r, 0 \leq b_q \leq b+b_{ov}\)。例如
select * from R where age&geq18 and age&leq21; (1-d)和select * from R where age between 18 and 21 and height between 160 and 190; (n-d)。 - Pattern-based Queries:基于模式的匹配,即 \(0 \leq r_q \leq r, 0 \leq b_q \leq b+b_{ov}\)。例如
select * from R where name like '%oo%';。
为了更有效率地进行选择,有几种比较基本的方法:
- 对元组进行排序 (Sorting) 或者哈希 (Hashing)
- 使用额外的索引结果,比如 Index Files、Signature
Heap Files
选择
在 Heap Files 中的选择,只有一种策略,就是通过线性扫描文件搜索匹配的元组:
// select * from R where C
for each page P in file of relation R {
for each tuple t in page P {
if (t satisfies C)
add tuple t to result set
}
}
在 Heap Files 中的选择,需要从第一个页面扫描到最后一个页面:

成本分析:\(Cost_{range}=Cost_{pmr}=b\)
如果我们知道只有一个元组与查询匹配(一个查询),那么就可以在找到一个查询之后就不用继续扫描了。此时的成本为 \(Cost_{one}: best=1, average=\frac{b}{2},worst=b\)。
插入
只需要将新元组插入到文件最后一个页面,伪代码如下:
rel = openRelation(”R”, READ|WRITE);
pid = nPages(rel)-1;
get_page(rel, pid, buf);
if (size(newTup) > size(buf)) // 检查新元组的大小是否超过缓冲区的大小
{ deal with oversize tuple }
else {
if (!hasSpace(buf,newTup)) // 检查缓冲区是否有足够的空间来容纳新元组
{ pid++; nPages(rel)++; clear(buf); }
insert_record(buf,newTup);
put_page(rel, pid, buf);
}
成本分析:\(Cost_{insert}=1_r+1_w\),如果加入的元组很大,则可能需要额外的写入,例如 PostgreSQL 的 TOAST。
其他策略:从R中找到任何有足够空间的页面,最好是已经加载到内存缓冲区的页面(而不一定非要是最后一页)。
PostgreSQL 中的策略:使用在缓冲池中最后一个被更新 (MRU) 的关系 R 的页。如果条件不满足,在缓冲池中寻找一个有足够空间的页,使用 FSM (Free Space Map) 来寻找这样一个满足条件的页,具体见 backend/access/heap/{heapam.c,hio.c}。
在 PostgreSQL 中的元组插入:
heap_insert(Relation relation, HeapTuple newtup, CommandId cid, ...)- 找到有足够的可用空间用于新元组的页面
- 确保页面加载到缓冲池并锁定
- 将元组数据复制到页面缓冲区,设置 xmin 等
- 将缓冲区标记为脏
- 将插入的详细信息写入事务日志
- 如果关系有 OID,则返回新元组的 OID
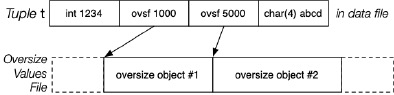
对于大元组的插入,这个时候我们需要一个独立于数据文件的额外文件(比如 PostgreSQL 的 Toasting)。比如在下图中,元组 t 的第二个属性的值无法存放在元组中,因此,我们会将该属性的值存放在一个额外的文件中,而在元组中的对应位置留下一个标记 (Marker) ,这个标记会告诉系统该属性值存放在额外文件中的哪个位置。
for i in 1 .. nAttr(t) {
if (t[i] not oversized) continue
off = appendToFile(ovf, t[i])
t[i] = (OVERSIZE, off)
}
insert into buf as before
删除
伪代码:
rel = openRelation(”R”,READ|WRITE);
for (p = 0; p < nPages(rel); p++) {
get_page(rel, p, buf);
ndels = 0;
for (i = 0; i < nTuples(buf); i++) {
tup = get_record(buf,i);
if (tup satisfies Condition)
{ ndels++; delete_record(buf,i); }
}
if (ndels > 0) put_page(rel, p, buf);
if (ndels > 0 && unique) break;
}
在 PostgreSQL 中的元组删除:
heap_delete(Relation relation, ItemPointer tid, ..., CommandId cid, ...)- 将包含元组的页面放入缓冲池并锁定它
- 在元组中设置标志、命令 ID 和 xmax,标记为脏缓冲区
- 向事务日志写入删除指示
Vacuuming 最终会压缩每页的空间。
更新
对更新的分析类似于删除:需要遍历所有页面,替换每一个需要更新的元组(在每页内),将有修改的页面写回磁盘。
成本分析:\(Cost_{update}=b_r+b_{w}\)
注意:如果更新后的元组大小不再合适原有的页面,此时就需要先去重新排布页中的空闲空间,以求能有充足的空间来放置修改后的元组。
在 PostgreSQL 中的元组删除:
heap_update(Relation relation, ItemPointer otid, HeapTuple newtup, ..., CommandId cid, ...)- 本质上就是先进行 Deletion,再进行 Insertion
- 设置旧元组的 ctid 字段以引用新元组
- 如果没有引用交易,也可以就地更新
在 PostgreSQL 中的实现
默认情况下,PostgreSQL 将所有的关系(还有索引文件)都以 Heap File 进行存储。如果有需要使用其他形式(比如 Sorted, Hashed)的文件,PostgreSQL 可以生成一个符合形式的副本,可以使用关键字 create index...using hash,Heap file 在 PostgreSQL 中的实现在 src/backend/access/heap。
PostgreSQL 中的 Heap file 可能会使用多个物理文件,文件以相应表的 OID 命名,第一个数据文件简称为 OID,如果大小超过 1GB,就会创建一个名为 OID.1 的 fork,随着数据大小的增长添加更多 fork(每1GB一个 fork)。除了数据文件,还有 free space map(空闲空间映射,OID_fsm)、visibility map(OID_vm),另外如果有元组的属性非常大就还有 TOAST 文件。
Sorted Files
记录按某个字段 k(排序键)的顺序在文件中进行存储。这将是查找的效率提高,但是插入的效率降低。因此,为了缓解插入的成本,会使用溢出页面。
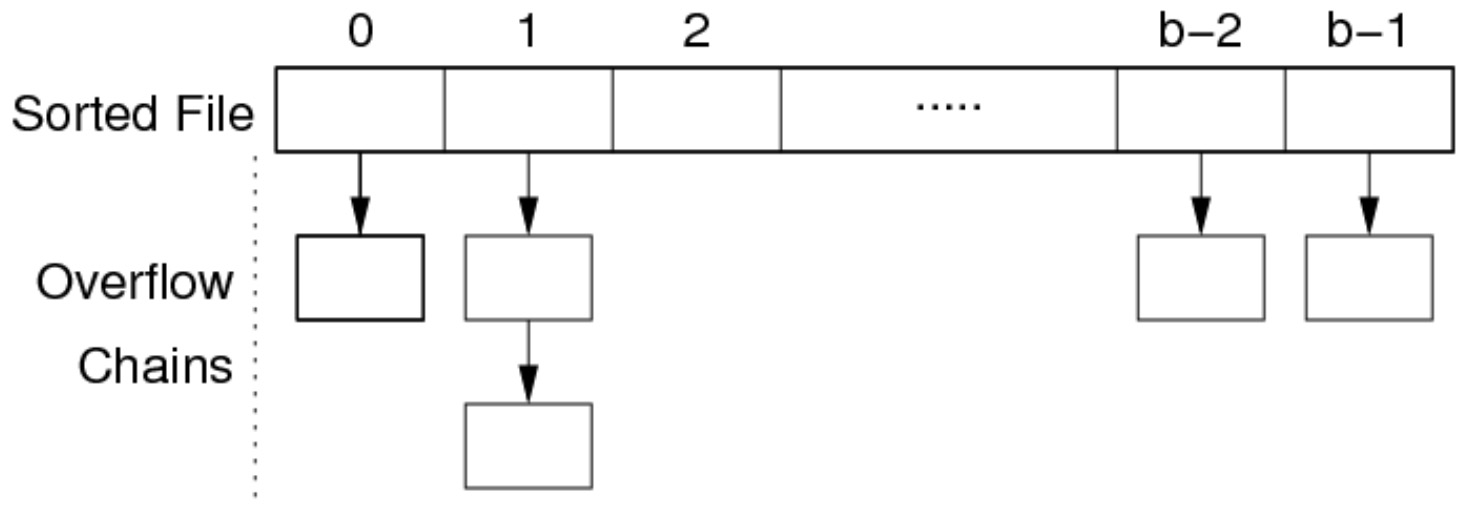
当某个页面满了之后,直接为该页面创建一个溢出页面,而不是将之后的元组顺延。假设溢出页面的总数为 \(b_{ov}\),那么溢出链表的平均长度为 \(\frac{b_{ov}}{b}\)。我们称一个页面和它的溢出链表为一个 Bucket。
选择
如果查询结果只有一个,并且文件是按顺序存储的,因此查询可以使用二分查找。
// select * from R where k = val (sorted on R.k)
// rel 表示 Relation
// mid, lo, hi 表示 Page Index
// k 表示条件属性 (The Sort Key)
// val, loval, hival 表示 k 的值
lo = 0; hi = b - 1;
while (lo <= hi) {
mid = (lo + hi) / 2;
(tup, loVal, hiVal) = searchBucket(f, mid, x, val);
if (tup != NULL) return tup;
elseif(val < loVal) hi = mid - 1;
elseif(val > hiVal) lo = mid + 1;
else return NOT_FOUND;
}
return NOT_FOUND;
这里的二分法搜索先是以页面为单位的,首先找到 Middle Page,在该页面的 Bucket 中寻找有无目标元组,searchBucket() 就是进行该任务的,如果能知道满足条件的元组就直接返回,否则返回 NULL,同时还会返回该 Bucket 中,最小和最大的 Key Value,如果没有找到目标元组,则需要这两个值来向前或者向后进行后续的搜索。
searchBucket(f,p,k,val) {
buf = getPage(f,p); // 获取第 p 个页面
(tup,min,max) = searchPage(buf,k,val,+INF,-INF) // 搜索这个页面,如果找到 k 的元组,则返回该元组,否则返回NULL,另外还要返回这个页面的最大、小值
if (tup != NULL) return(tup,min,max); // 如果找到元组就返回
ovf = openOvFile(f); // 没找到,就继续在溢出页面中搜索,先获取溢出文件的句柄
ovp = ovflow(buf); // 获取当前页面 buf 中的溢出页面号
while (tup == NULL && ovp != NO_PAGE) {
buf = getPage(ovf,ovp);
(tup,min,max) = searchPage(buf,k,val,min,max)
ovp = ovflow(buf);
}
return (tup,min,max);
}
// 在给定页面 buf 中根据键 k 和值 val 进行搜索,并返回满足条件的元组以及键的最小值和最大值
searchPage(buf,k,val,min,max) {
res = NULL;
for (i = 0; i < nTuples(buf); i++) {
tup = getTuple(buf,i);
if (tup.k == val) res = tup;
if (tup.k < min) min = tup.k;
if (tup.k > max) max = tup.k;
}
return (res,min,max);
}
成本分析:上述方法都将每个桶视为一个大的页面。因此,最好的情况就是在第一个页面就找到了匹配的元组 \(Cost_{one}=1\),最差情况就是执行完二分查找,最终还是没有找到想要的元组 \(Cost_{one}=log_2b+b_{ov}\)。平均情况需要根据数据的分布来确定,其成本 \(Cost_{one}=b_{examine}+b_{ov}\)。
练习:数据分布如下,\(b=5,c=4\):
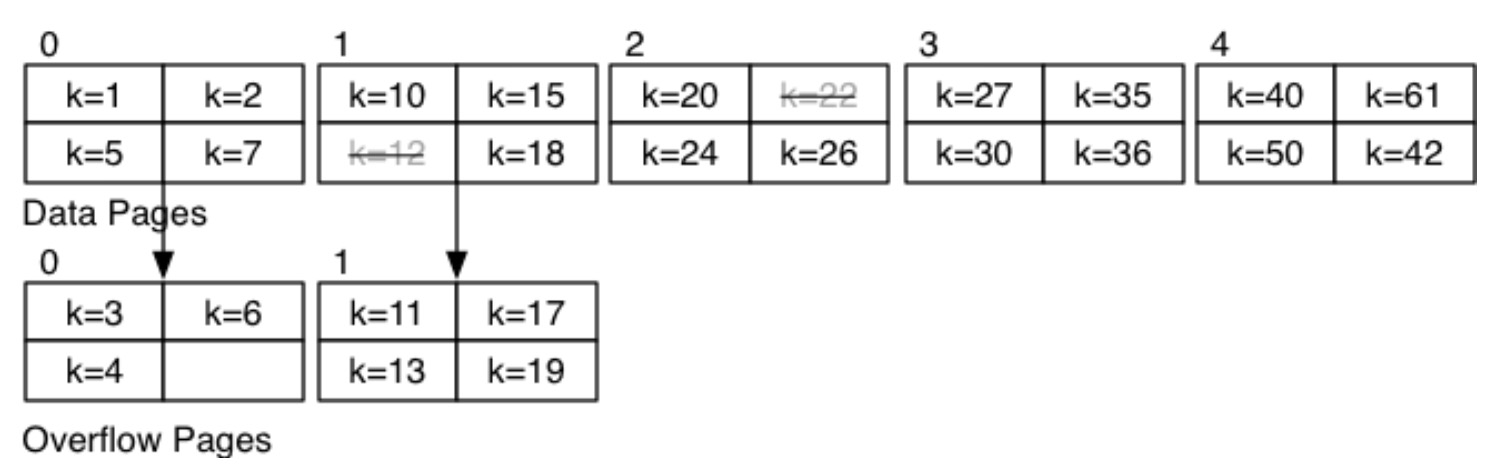
计算以下查询的成本:
select * from R where k = 24;:首先搜索索引为 2 的页面,发现存在键为 24 的元组。因此,成本 \(Cost=1\)。select * from R where k = 3;:首先搜索索引为 2 的页面,未发现键为 3 的元组。而该页面最小值也大于 3。所以接下来检索索引为 0 的页面,在该页面未找到键为 3 的元组,但是存在溢出页面,所以加载溢出页面继续检索,在第一个溢出页面找到元组。因此,成本 \(Cost=3\)。select * from R where k = 14;:首先搜索索引为 2 的页面,未发现键为 3 的元组。接下来检索索引为 0 的页面,在该页面未找到键为 3 的元组。检索索引为 0 的溢出页面,也未找到。最后,检索索引为 1 的页面和其溢出页面,均为找到。二分查找终止,其成本 \(Cost=5\)。select max(k) from R;:因为数据是按照顺序来存储的,因此最大值在最后一页,所以直接检索最后一页,由于没有溢出页面,所以其成本 \(Cost=1\)。
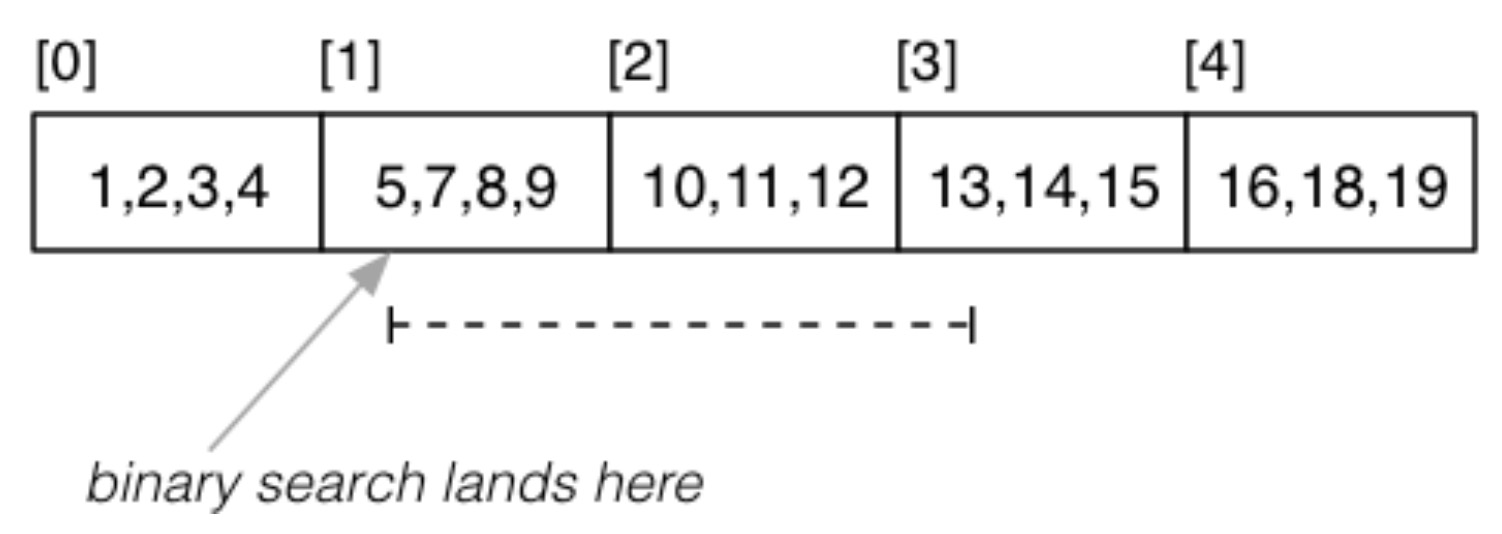
对于 Partial Match Retrieve ,由于目标属性 k 的取值会有重复,因此有可能具备相同值的元组分布在多个不同的页面中,如 select * from R where k = 2;:
此时当我们使用二分法查找时,会首先找到索引为 2 的页面,但索引为 1、3 的页面都有可能包含符合条件的元组。此时代价为 \(Cost_{pmr}=Cost_{one}+(b_q-1)\cdot(1+b_{ov})\)。
对于 Range Query ,首先来看目标属性 k 的取值不会有重复时的情况,如 select * from R where k >= 5 and k <= 13;:
首先用二分查找的方式找到下界,然后按照顺序遍历直到上界。因此其成本为 \(Cost_{range}=Cost_{one}+(b_q-1)\cdot(1+b_{ov})\)。
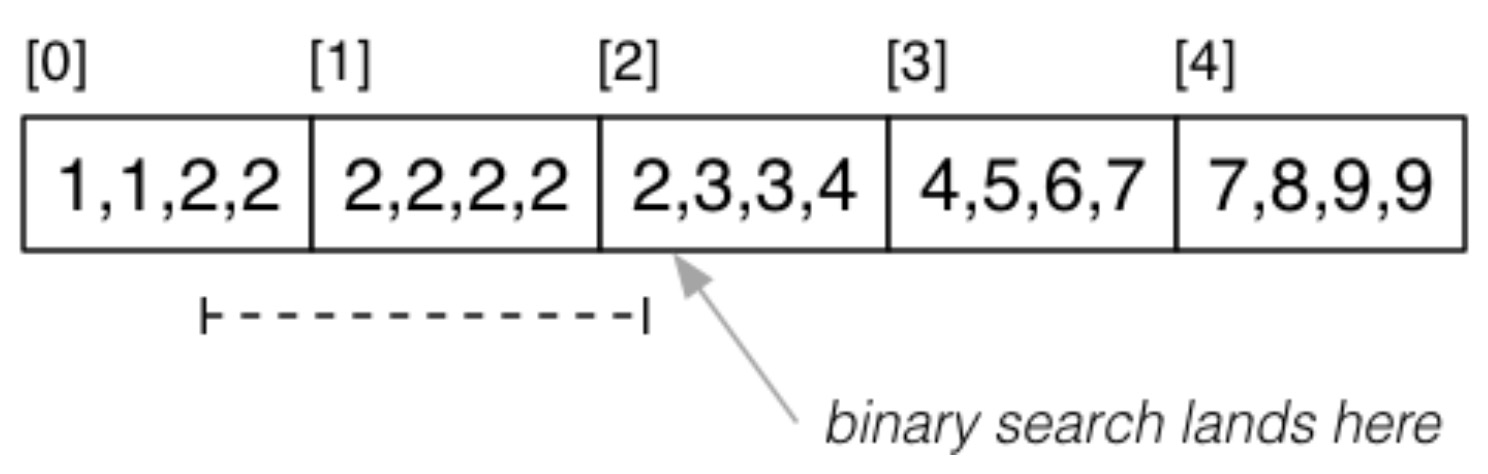
另外一种情况就是目标属性 k 的取值存在重复的情况,如 select * from R where k >= 2 and k <= 6:
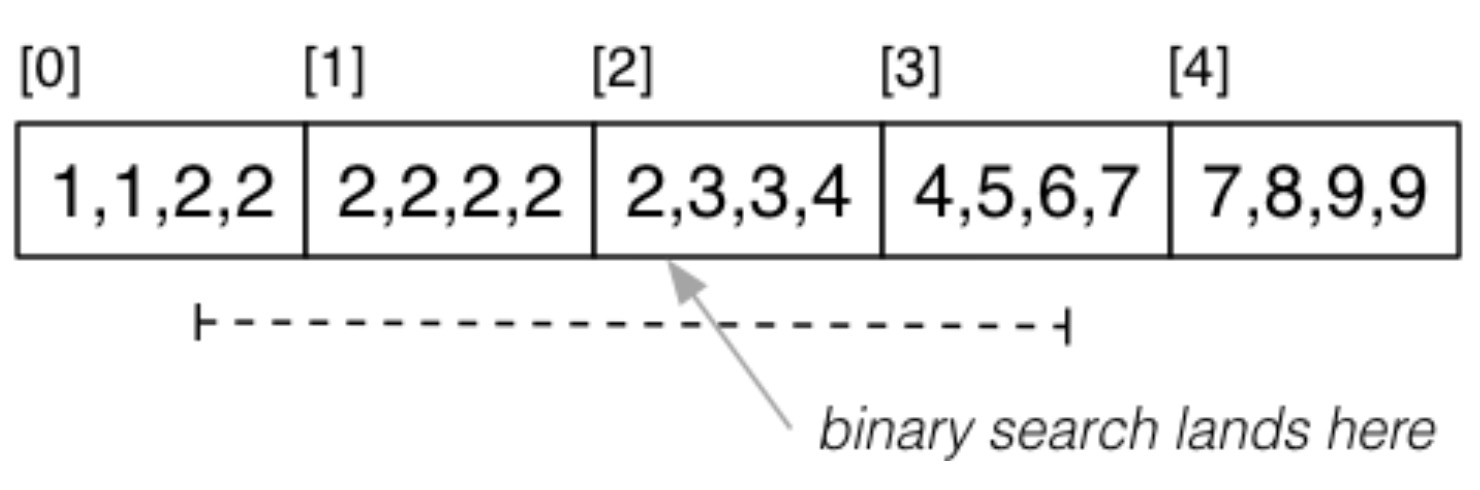
首先用二分查找的方式找到下界,因为有重复的情况,所以需要继续向前搜索,找到真正的“下界”,即第一个下界元组所在的页面,然后开始向后查找,直到找到上界。因此其成本为 \(Cost_{range}=Cost_{one}+(b_q-1)\cdot(1+b_{ov})\)。
以上考虑的所有情况都是在属性 k 为排序键的情况,那么,如果条件属性不是排序键的话,此时检索的方式就跟 heap files 相同。
插入
思路:通过二分查找的方式找到适合插入的页面, 如果该页面没有满,就直接插入,如果满了,就插入到溢出页面。因此其成本为 \(Cost_{insert}=Cost_{one}+\delta_w\),这里的 \(\delta_w\) 要么为 1 要么为 2。
练习:当数据分布如下时:
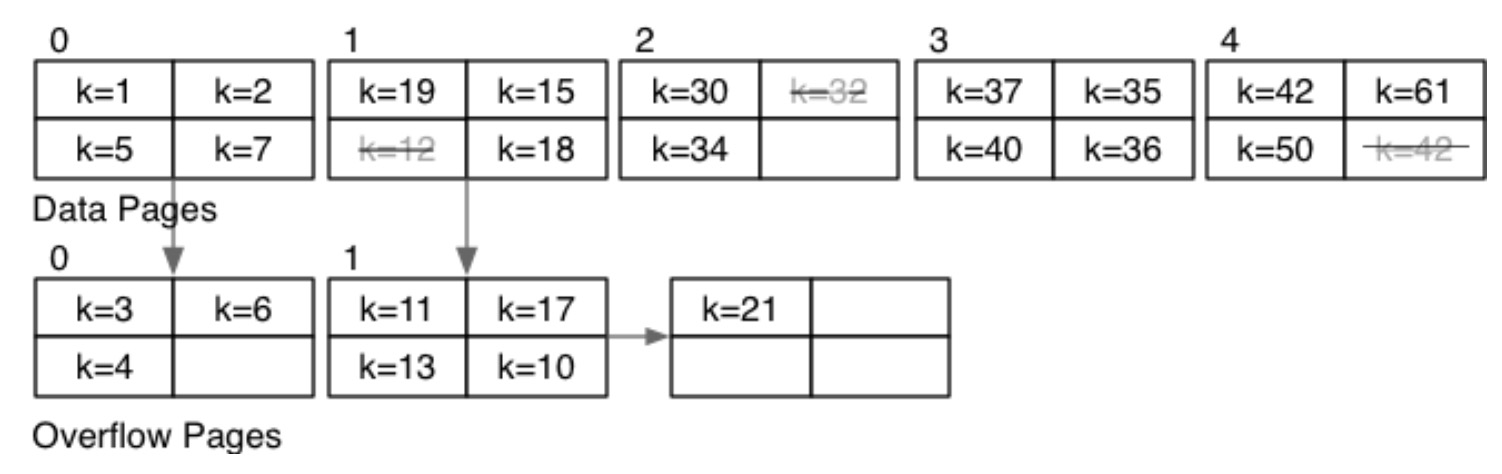
- 插入 \(k=33\):根据二分查找,首先检索索引为 2 的页面,该页面最大值为 34,最小值为 30,因此插入到这个页面,由于有空闲位置,所以其成本为 \(Cost_{insert}=Cost_{one}+\delta_w=1+1=2\)。
- 插入 \(k=25\):根据二分查找,首先检索索引为 2 的页面,其最小值大于 25,接着找索引为 0 的页面,以及其溢出页面,最大值都小于 25。接着检索索引为 1 的页面,以及其溢出页面,最大值都小于 25,但是已经二分查找完了,因此 25 插入到索引为 1 的页面中。因此其成本为 \(Cost_{insert}=Cost_{one}+\delta_w=6+1=7\)。
- 插入 \(k=99\):根据二分查找,首先检索索引为 2 的页面,其最大值小于 99。接着遍历索引为 3 的页面,其最大值小于 99。再接着遍历索引为 4 的页面,其最大值小于 99,但是由于最后一页了,所以就插入到该页面。因为该页面满了,所以其成本为 \(Cost_{insert}=Cost_{one}+\delta_w=3+2=5\)。
删除
基本操作依旧与选择一样,先找到对应的页面,然后找到对应的元组,将其标记为 Deleted。它的代价同样和 \(b_q\) 相关,如果 k 取值没有重复,则 \(b_q = 1\),如果有重复,\(b_q > 1\)。
其代价为 \(Cost_{delete}=Cost_{select}+b_{qw}\)。
Hashed Files
简介
基本思想:使用键的哈希值来计算元组的页面地址。
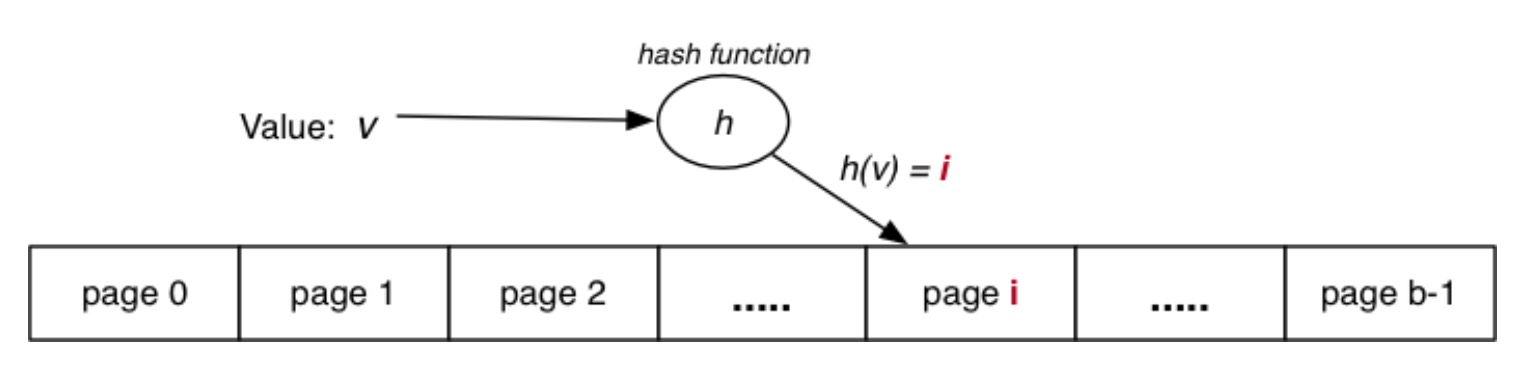
因此,哈希函数需要能将键值的范围映射到 \([0,b-1]\) 中。哈希函数函数将键值(任何类型)转换为整数值,该值与页面的索引相对应,可以将整数值视为位字符串。
在 PostgreSQL 中的哈希函数如下,可以将任意一种类型的值映射为一个 32 bit 的整数值:
// backend/access/hash/hashfunc.c
Datum hash_any(unsigned char *k, register int keylen) {
register uint32 a, b, c, len;
/* Set up the internal state */
len = keylen; a = b = c = 0x9e3779b9 + len + 3923095;
/* handle most of the key */
while (len >= 12) {
a += ka[0]; b += ka[1];
c += ka[2]; mix(a, b, c);
ka += 3; len -= 12;
}
/* collect any data from last 11 bytes into a,b,c */
mix(a, b, c);
return UInt32GetDatum(c);
}
有两种方法将 hash_any 函数计算得到的原始哈希值转换为页面的地址。
- 如果 \(b=2^k\),进行 “位与” 操作
uint32 hashToPageNum(uint32 hval) {
uint32 mask = 0xFFFFFFFF;
return (hval & (mask >> (32-k)));
}
- 否则,使用取余操作
uint32 hashToPageNum(uint32 hval) {
return (hval % b);
}
这么做有两个目的。第一,可以将元组均匀地分布在各个哈希桶中;第二,会使得每个哈希同尽可能存满,不浪费空间。所以此时:
- 最好的情况:每个哈希桶有几乎数量一致的元组
- 最坏的情况:所有的元组都被映射到同一个哈希桶中
- 通常情况:一部分哈希桶有着更多的元组
使用溢出页面处理“超满”桶,每个桶中的所有元组必须具有相同的哈希值。
性能
对于 Hashed Files,有两个重要的评估指标:
- 负载因子(load factor):\(L=\frac{r}{bc}\),\(r\) 是元组的总数;\(b\) 是页面的总数;\(c\) 是每个页面的容量。所以 \(bc\) 就是理论最多能容纳的元组的数量。我们用 \(L\) 来表示每个页面被填充的程度,最理想的就是 \(r = bc\),即 \(L=1\),此时存储的元组刚好为理论最大,每个页面存储的元组数量相同。
- 平均溢出页面长度:\(Ov=\frac{b_{ov}}{b}\)
根据元组在 Hashed Files 中的分布,分为三种情况:
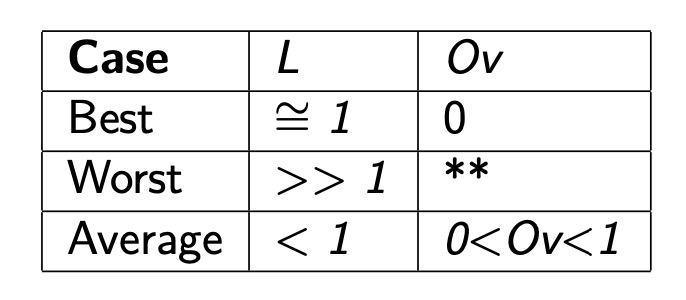
这里的 \(**\) 表示与 Heap Files 性能一样。通常情况下,我们期望保持 \(0.75 < L < 0.9\)。
选择
首先来看 One Type Query:只需要对键值使用哈希函数,得到目标页面 P,接着在该页面及其溢出页面中搜索即可,其伪代码如下:
// select * from R where k = val
pid,P = getPageViaHash(val,R)
for each tuple t in page P {
if (t.k == val) return t
}
for each overflow page Q of P {
for each tuple t in page Q {
if (t.k == val) return t
}
}
成本分析:
- 最好情况:\(Cost_{one}=1\)
- 最坏情况:\(Cost_{one}=1+max(Ovlen)\)
- 平均情况:\(Cost_{one}=1+\frac{Ov}{2}\)
再看 Partial Match Retrieve:因为结果不唯一,所以要找到所有的结果,其伪代码如下:
// select * from R where nk = val
pid,P = getPageViaHash(val,R)
for each tuple t in page P {
if (t.nk == val) add t to results
}
for each overflow page Q of P {
for each tuple t in page Q {
if (t.nk == val) add t to results
}
}
return results
其成本为 \(Cost_{pmr}=1+Ov\)。
最后看 Range Query:因为 Hash Files 是完全无序的,所以需要扫描所有的页面去找到符合条件的元组。其成本为 \(Cost_{range}=b+b_{ov}\)。而对于那些不是键的属性的搜索,则和 Heap Files 完全一样,其成本为 \(Cost_{one}=Cost_{pmr}=Cost_{range}=b+b_{ov}\)。
插入
插入操作则与 One Type Query 差不多,其伪代码如下:
// insert tuple t with key=val into rel R
pid,P = getPageViaHash(val,R)
if room in page P {
insert t into P; return
}
for each overflow page Q of P {
if room in page Q {
insert t into Q; return
}
}
add new overflow page Q
link Q to previous page
insert t into Q
成本分析:
- 最好的情况:找到的页面有足够的空间用于插入,其成本为 \(Cost_{insert}=1_r+1_w\)。
- 最坏的情况:寻遍该页面的所有溢出页面没有足够的空间,因此需要再创建一个新的溢出页面,其成本为 \(Cost_{insert}=1_r+max(Ovlen)_r+2_w\)。
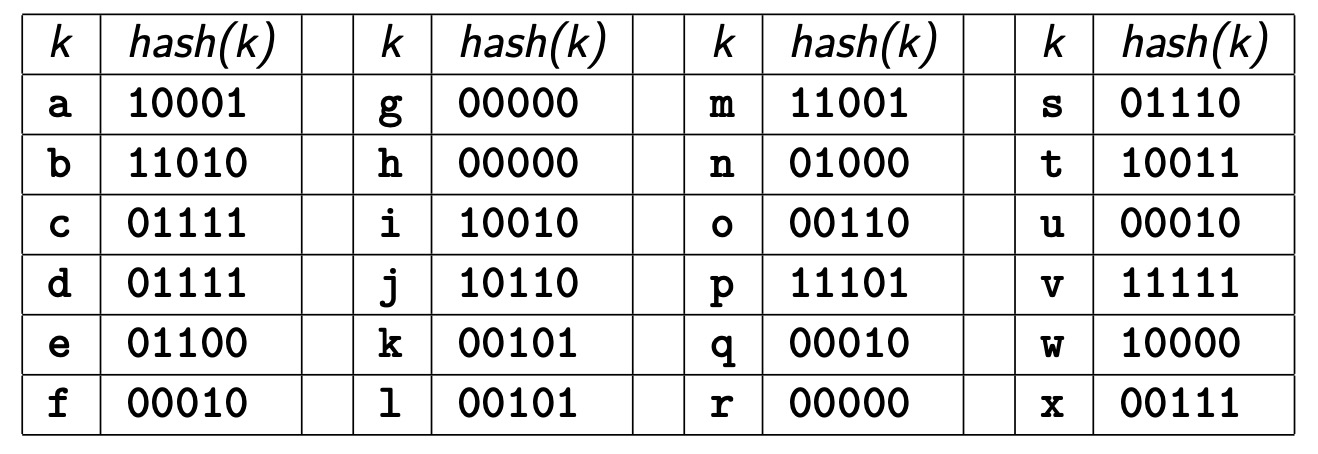
练习:一个 Hashed files,其 \(b=4,c=3,d=2,h(x)=bits(d,hash(x))\)。使用以下键的哈希值按照字母顺序插入 Hashed files 中,哈希值是完整 32位 哈希中的 5 个低位。

页面 0:e g h n 溢出页面 0:r w
页面 1:a k l m 溢出页面 0:p
页面 2:b f i j 溢出页面 0:o s u
页面 3:c d t v 溢出页面 0:x
删除
删除与与目标属性取值有重复的查询类似,区别仅在与最后要将修改过的页面写回磁盘:
// delete from R where k = val;
pid,P = getPageViaHash(val,R) // 根据val的哈希值找到存储该值的数据页的页号pid和页P
ndel = delTuples(P,k,val) // 删除页P中满足条件k=val的记录
if (ndel > 0) putPage(f,P,pid) // 有需要删除的元组,将修改后的页P写回数据文件f中的对应页号
for each overflow page qid,Q of P { // 处理溢出页面
ndel = delTuples(Q,k,val)
if (ndel > 0) putPage(ovf,Q,qid)
}
哈希的问题
到目前为止,对哈希的讨论都是在固定的文件大小的前提下进行的。因此哈希的性能会随着溢出页面的增加而降低。当然,我们可以将文件的固定大小设置的非常大,这样就可以避免溢出页面增长速度过快的问题,但是大量的空闲页面会造成浪费。
所以,为了克服上面的问题,文件的大小就不能固定。而大小不固定就需要一个不固定的哈希函数,有两种方法:
- 可扩展哈希,动态哈希 (Extendible hashing, Dynamic hashing):这种方法需要 Directory,且 Directory 会随着文件尺寸的增长不断增长,但是不需要溢出页面。
- 线性哈希 (Linear Hashing):系统性地扩展文件,不需要 Directory,但是需要溢出页面。该方法更加推荐。
所有可变哈希方法,都将哈希值作为一个 32 位的位字符串。哈希函数发生变化时,实际上就是使用更多或者更少的位字符串。
首先使用哈希函数将数值转换为一个 32 位的位字符串:uint32 hash(unsigned char *val)
然后,使用一个函数从其中提取 d 位的子串: unit32 bits(int d, uint32 val)
使用这个子串来表示页面的地址。
练习:位操作
写一个函数将 uint32 的值显示为二进制字符串表示。
char *showBits(uint32 val, char *buf) {
uint32 mask = 1 << (sizeof(uint32) * 8 - 1); // // 从最左边的位开始,将1左移动31位,,mask就是10000000000000000000000000000000
// 遍历每一位
for (int i = 0; i < sizeof(uint32) * 8; i++) {
if (val & mask) { // 将val和mask进行与操作,只有当两个位都为1时,结果位才为1
*buf = '1'; // 将缓冲区中对应的位设为'1'
} else {
*buf = '0'; // 将缓冲区中对应的位设为'0'
}
buf++; // 移动到缓冲区中的下一个字符
mask >>= 1; // 将掩码向右移动1位
}
*buf = '\0'; // 在缓冲区末尾添加空字符,表示字符串的结束
return buf;
}
写一个函数来提取一个 uint32 值的 d 位,如果 d > 0,提取低位的 d 位;如果 d < 0,提取高位的 d 位。
uint32 bits(int d, uint32 val) {
if (d > 0) { // 提取低位
uint32 mask = (1 << d) - 1; // 将1左移d位并减去1得到一个最右边d位为1其余为0的32位数
return val & mask;
} else if (d < 0) { // 提取高位
int numBits = sizeof(uint32) * 8;
uint32 mask = ((1 << (-d)) - 1) << (numBits - (-d)); // 得到左边d位为1其余为0的32位数
return (val & mask) >> (numBits - (-d));
} else {
return 0;
}
}
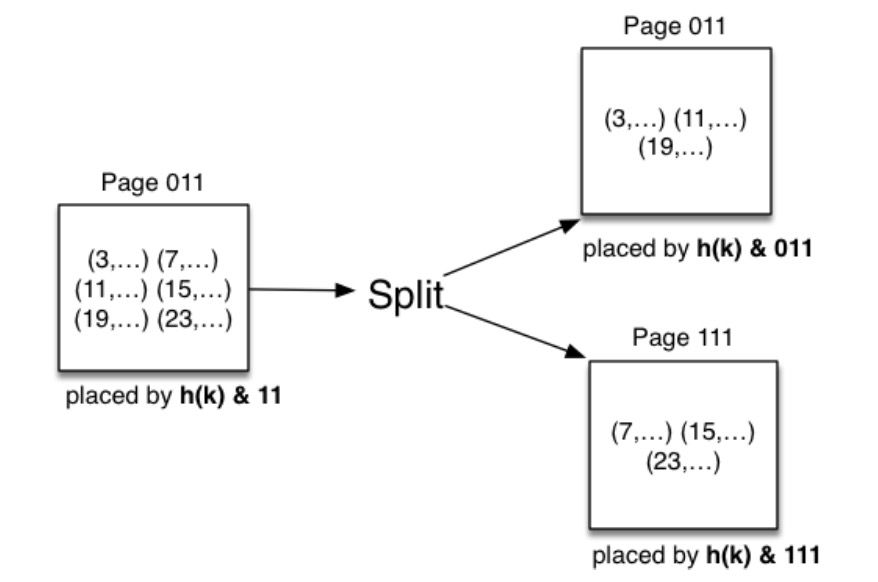
分割
可变哈希的一个重要的概念就是“分割”。因为同一个页面的所有元组的哈希值都相同,因此可以通过考虑额外的位来重新计算元组的页地址。比如,当前的页面是 101,那么新的页面的哈希值就可以是 0101 和 1101。然后原来在 101 页面的元组一部份保留,101 页面也就是 0101,另一部份移动到新的页面 1101 中。也要对 101 这个页面的溢出页面进行相同的操作。
结果:可扩展的数据文件,就不需要全部推倒进行重建了,只需要对部份页面进行修改就可以实现扩展的功能。
线性哈希(Linear Hashing)
文件的组织
- 主要数据块的文件
- 溢出数据块的文件
- 用于存储分割的指针(sp)的寄存器
使用系统的方法来增长数据文件,哈希函数需要“适应”地址范围的变化,系统的分割来控制溢出页面的长度。优点就是不需要目录的辅助存储,而缺点则是需要溢出页面。
线性哈希
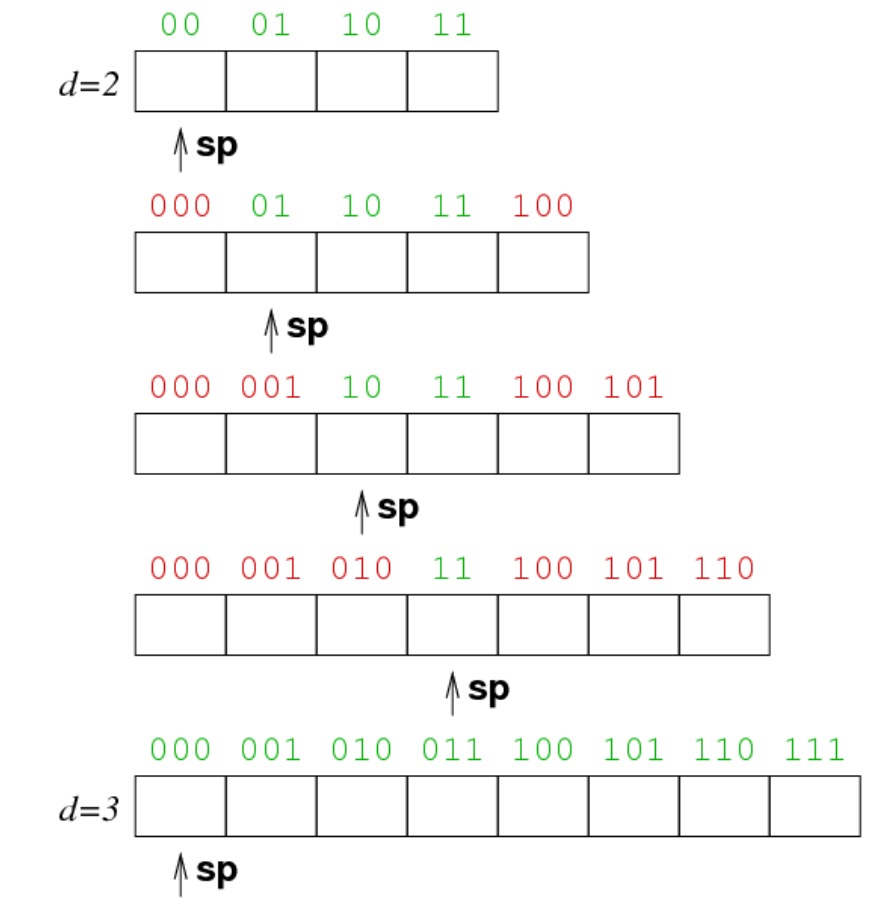
文件线性增长(每一次扩充只增加一个块,定期增长)。线性哈希中的文件扩展分为以下几个阶段:
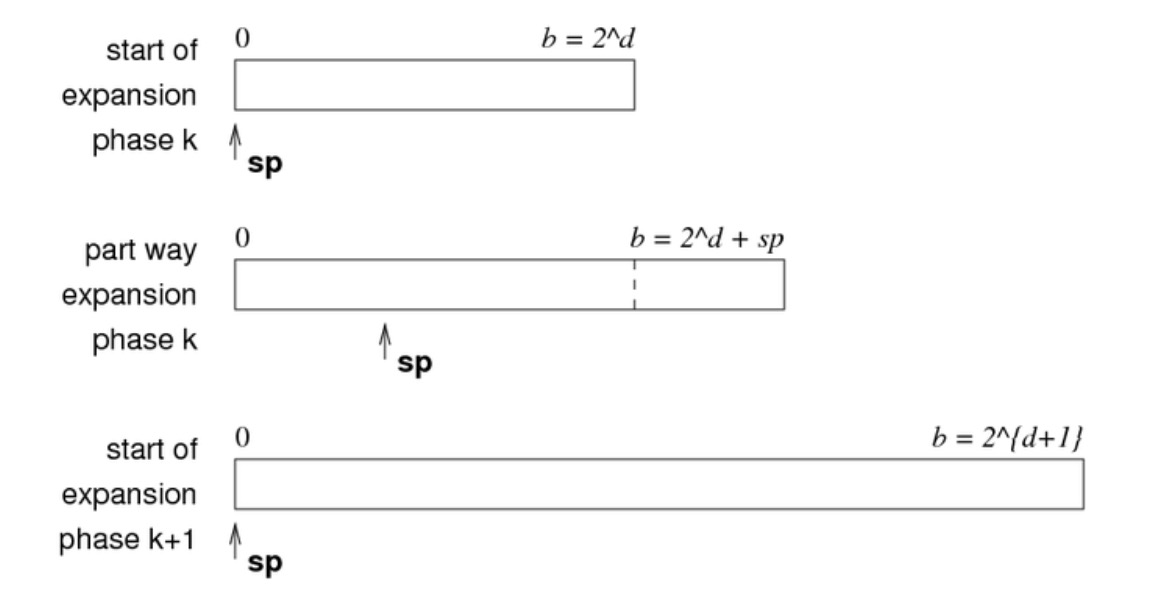
- 在最初的阶段,只有原文件,此时共有 \(b=2^d\) 个页面
- 当不断添加页面时,sp 会不断增大,增大的具体数值等于新加入的页面数量
- 当 \(sp = 2^d\) 时,此时整个文件的尺寸翻倍,就需要将 sp 重新置于开头
选择
如果 \(b=2^d\),该文件的行为与标准哈希完全相同,使用 d 位哈希来计算页面地址。
// select * from R where k = val;
h = hash(val);
P = bits(d,h); // 取d位
for each tuple t in page P and its overflow pages {
if (t.k == val) return t;
}
成本分析:\(Cost_{average}=1+Ov\)。
如果 \(b!=2^d\),此时 sp 一定不会在整个文件的开头,因此需要用不同的方式来对待文件的不同部分。
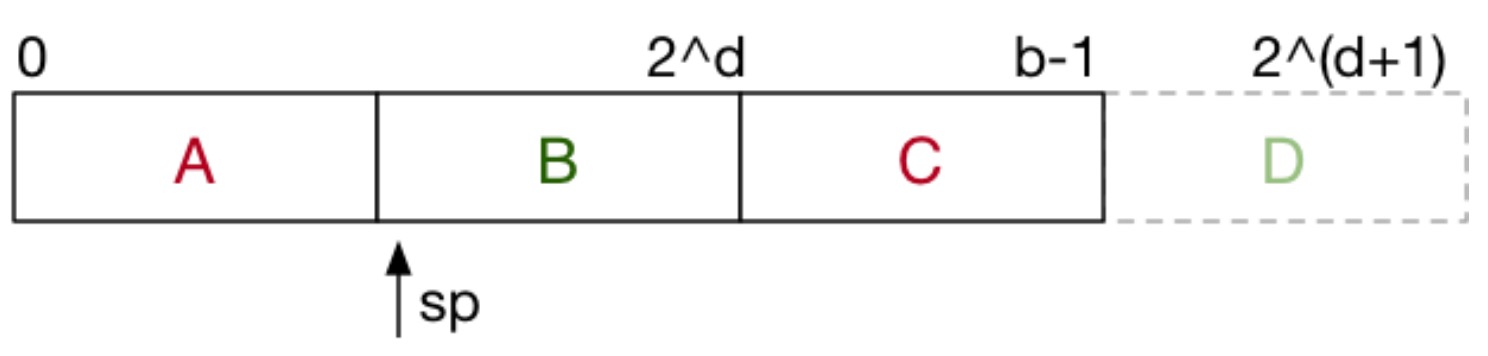
此时的 Part A 和 Part C 被当做一个规模为 \(2^{d+1}\) 的文件部分(Part A 和 Part C 的地址哈希值只差了一位,比如一个是 0101,一个是 1101)。Part B 被当做一个规模为 \(2^d\) 的文件部分。也就是说,如果通过哈希函数得到的地址哈希值小于 sp,那么,就需要地址哈希值需要多取一位才行,这样才能确认该元组是在 Part A 还是 Part C 之中。而 Part B 是跟该元组不关联的页面,因此可以直接根据地址哈希来判断元组是否在其中。Part D 目前还不存在,但随着不断增加页面,直到整体规模为 \(2^k\) 时,Part D 就形成了。
因此,调整后的搜索算法如下:
// select * from R where k = val
h = hash(val);
p = bits(d,h);
if (P < sp) { p = bits(d+1,h); } // 多取一位
P = getPage(f, p)
for each tuple t in page P and its overflow blocks {
if (t.k == val) return R;
}
以下是线性哈希对文件尺寸进行扩展的例子:
插入
插入操作和一般的 Hash File 一样,只是需要多检查一位哈希值,同时,还需要进行分割,其伪代码如下:
p = bits(d,hash(val));
if (p < sp) P = bits(d+1,hash(val));
// bucket P = page P + its overflow pages P = getPage(f,p)
for each page Q in bucket P {
if (space in Q) {
insert tuple into Q
break
}
}
if (no insertion) {
add new ovflow page to bucket P
insert tuple into new page
}
if (need to split) {
partition tuples from bucket sp into buckets sp and sp+2^d
sp++;
if (sp == 2^d) { d++; sp = 0; }
}
成本分析:
如果不需要分割,成本与标准哈希相同。
此时成本为 \(Cost_{best}=1_r+1_w,Cost_{average}=(1+Ov)_r+1_w,Cost_{worst}=(1+max(Ov))_r+2_w\)。
如果发生了分割,插入成本还需要加上分割的成本:
- 读取 sp 所指的页面(包括其溢出页面)
- 写 sp 所指的页面(包括其新产生的溢出页面)
- 写 \(sp+2^d\) 所指的页面(包括其新产生的溢出页面)
因此,平均来讲,分割的成本为 \(Cost_{split}=(1+Ov)_r+(2+Ov)_w\)
分割
有两种方式来触发分割:
- 每当有一个元组插入到一个已满的页面时
- 当负载因子达到一定的阈值时,比如每进行 k 次插入时
注意:分割总是发生在 sp 当前指向的页面,即使该页面未满或者当前插入的页面不是 sp 所指的页面。
分割可以减少每个溢出页面的长度,有助于保持短的平均溢出页面长度。
以下是分割的图示:
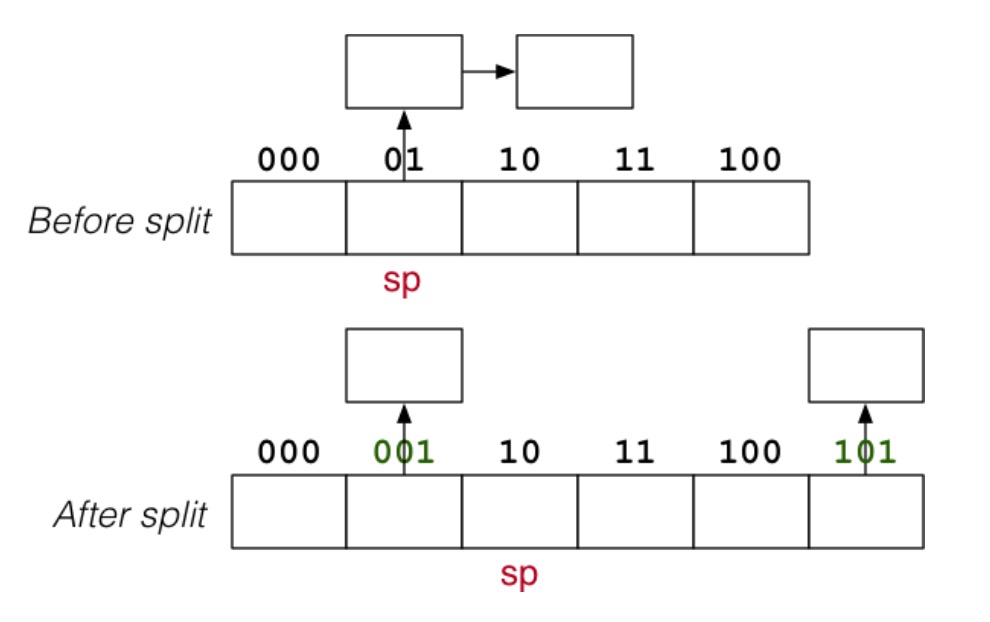
以下是分割的算法:
// partition tuples between two buckets
newp = sp + 2^d; oldp = sp;
for all tuples t in P[oldp] and its overflows {
p = bits(d+1,hash(t.k));
if (p == newp)
add tuple t to bucket[newp]
else
add tuple t to bucket[oldp]
}
sp++;
if (sp == 2^d) { d++; sp = 0; }
删除
删除操作和一般静态哈希文件一样。但是,当删除足够的元组时,需要压缩文件。因为当 r 缩小后,而 b 依旧很大,这就浪费了空间。 此时需要进行 Splitting 的反操作,将最后一个哈希桶移除,将这个哈希桶中的元组和其相关哈希桶中的元组进行合并,放入后一个未删除的哈希桶中。
练习
将下面元组按照字母的顺序插入到哈希文件中,哈希文件的 \(b=4,c=3,d=2,sp=0,h(x)=bits(d,hash(x))\)
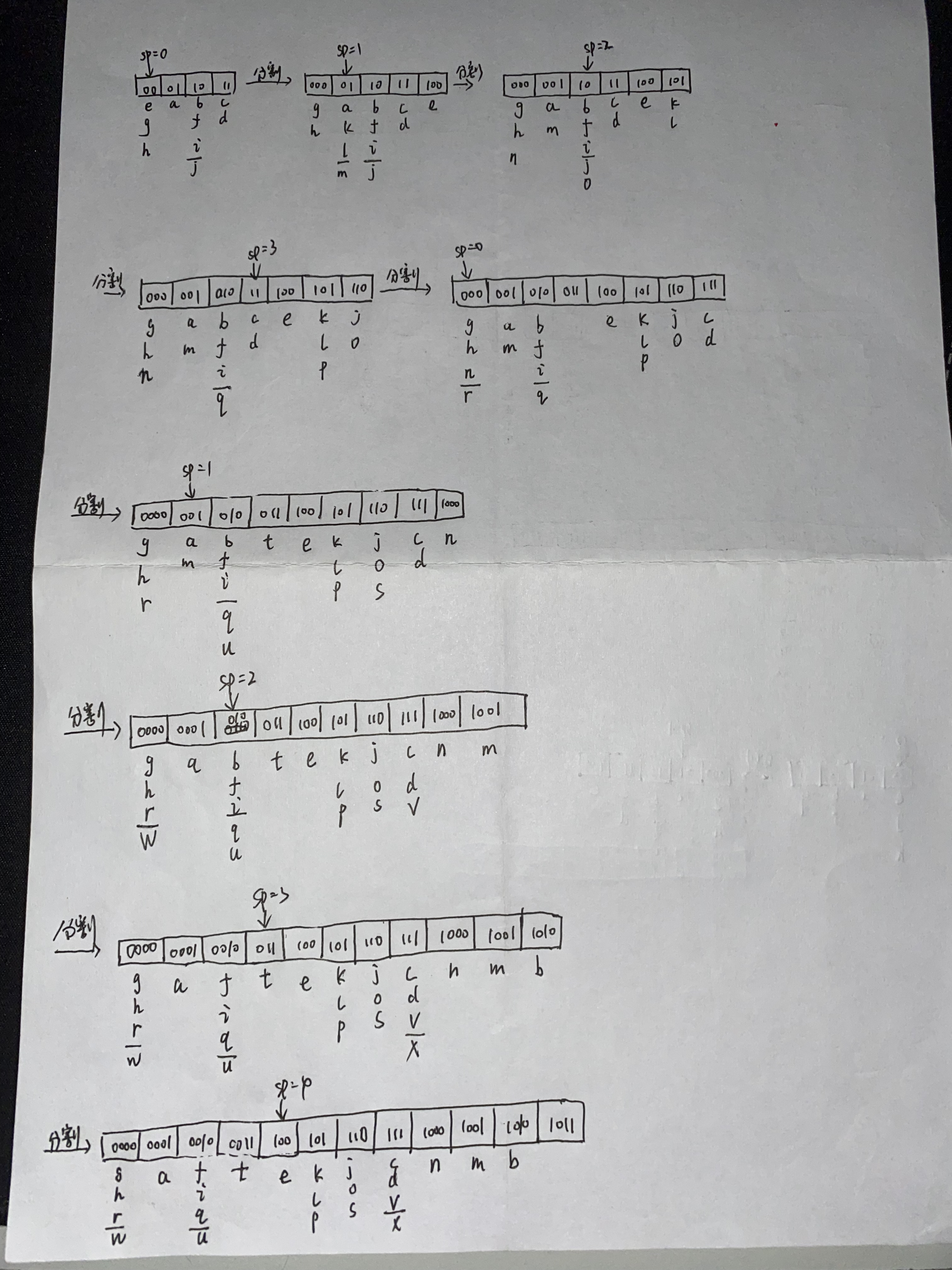
PostgreSQL 中的 Hash Files
PostgreSQL 在以下表上使用线性哈希:create index Ix on R using hash (k);
哈希文件的实现在 backend/access/hash 目录下:
hashfunc.c:包含所需的哈希函数hashinsert.c:插入操作,包括溢出页面hashpage.c:一个工具函数和用于分割的函数hashsearch.c:哈希文件的搜索相关的函数
PostgreSQL 使用略微不同的文件组织:
- 一个文件包含了 Header (Metadata),Main (Regular Data Pages), Overflow Pages
- Main Pages 分为多个组,每个组的尺寸为 \(2^n\)
- 在 Header 中保存了指向这多个组的 Pointers
- 每个 Pointer 指向每个组的开头
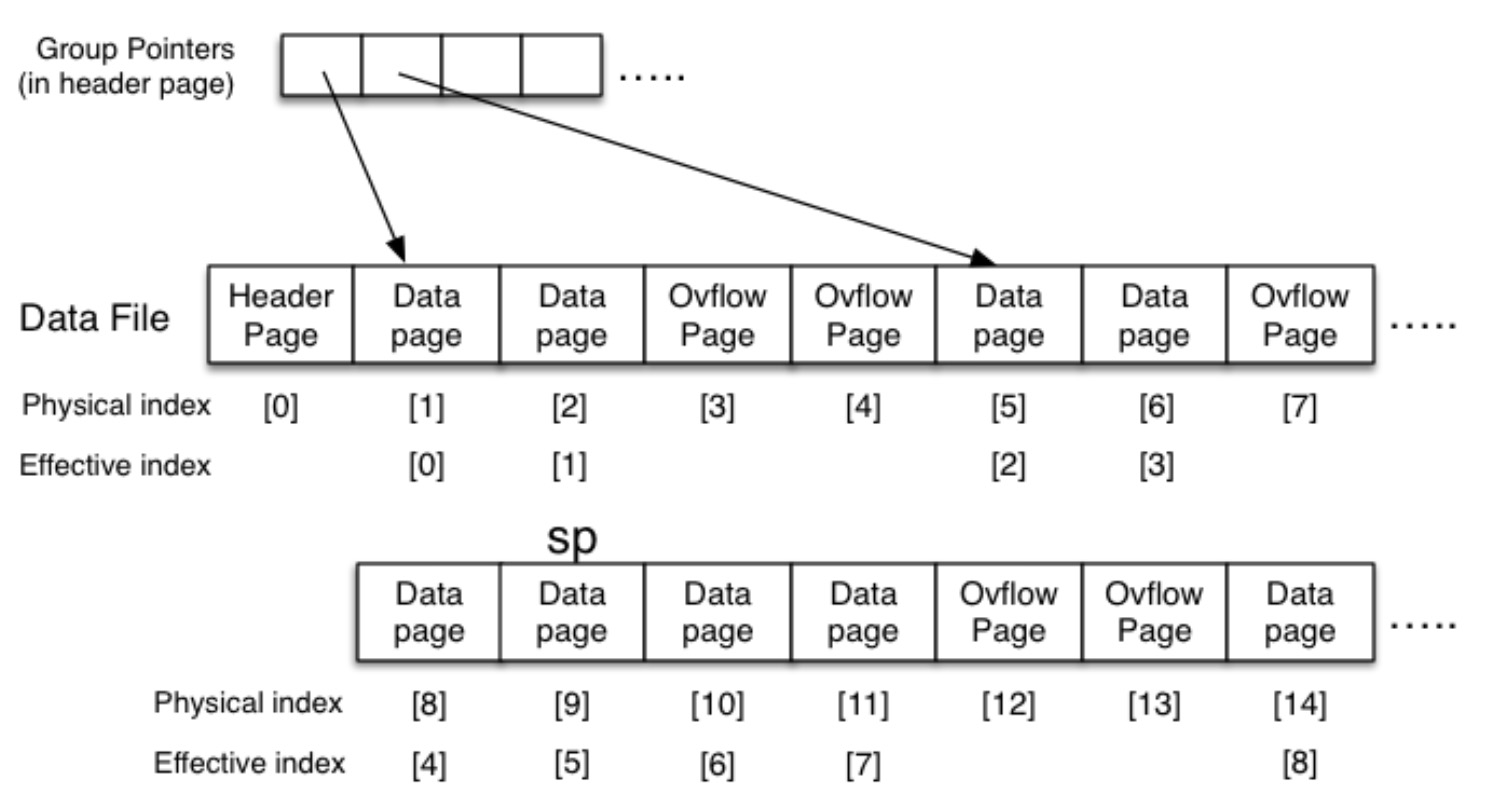
物理索引和 Bucket 索引实际上是不同的。我们需要一个函数将 Bucket Index 转换为物理索引。
// which page is primary page of bucket`
uint bucket_to_page(headerp, B) {
uint *splits = headerp->hashm_spares;
uint chunk, base, offset, lg2(uint);
chunk = (B<2) ? 0 : lg2(B+1)-1;
base = splits[chunk];
offset = (B<2) ? B : B-(1<<chunk);
return (base + offset);
}
// returns ceil(log_2(n))
int lg2(uint n) {
int i, v;
for (i = 0, v = 1; v < n; v <<= 1) i++;
return i;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号