
串口通讯(下)——简单的USART数据收发实验
简单做个USART的串口数据收发实验。实验在stm32f103上完成。
我们选择CH340G芯片来完成,其可以实现USB转USART。
查阅开发板原理图可得,CH340G芯片TXD、RXD默认与USART1的TX、RX连接,即PA9、PA10引脚。如图11-1。
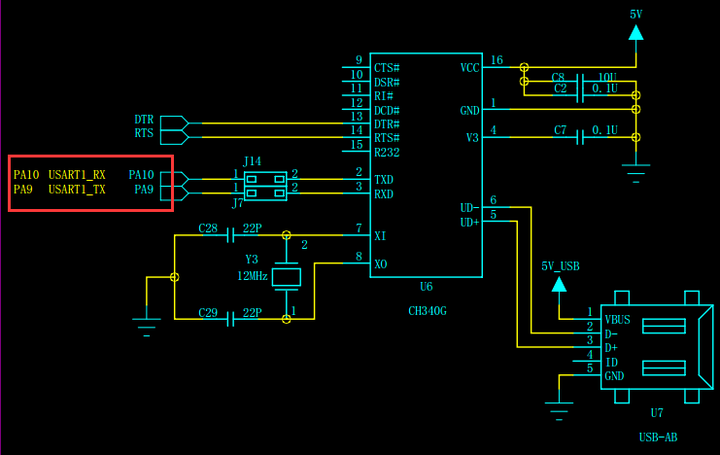
图11-1
当然了,如果你想用其他串口,如USART2的收发引脚,直接用杜邦线连接到相应引脚即可。
实验中会用到USART接收中断,当USART收到数据即执行中断函数。所以我们需要配置NVIC。
static void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
这里如何配置不再赘述,专栏里之前的文章已经有了相关介绍,有不明白的地方可移步阅读。
接下来进行USART初始化的配置。GPIO_InitTypeDef和NVIC_InitTypeDef两个结构体分别定义对应的结构体对象。然后开启GPIO和USART时钟。接下来配置USART的TX、RX引脚和串口的参数。我们配置其波特率为115200,8个数据位,1个停止位,无校验,无硬件流控制,数据收发一起。
void USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
/* USART_TX GPIO配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* USART_RX GPIO配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 串口参数配置 */
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
NVIC_Configuration();
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); // 使能USART1接收中断
USART_Cmd(USART1, ENABLE);
}
相关的配置已经完成,接下来开始发送数据。之前的文章说到过,发送时由TDR寄存器逐位将数据转移到发送移位寄存器,然后由移位寄存器一位一位发送。所以如果需要发送字符串数据,则可按此原理进行逐位发送。
/* 发送单个字符 */
void Usart_SendByte(USART_TypeDef* pUSARTx, uint8_t data)
{
// 操作USART_DR寄存器发送单个数据
USART_SendData(pUSARTx, data);
// 等待发送寄存器TDR为空,为空时则置1
while(USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
/* 发送字符串 */
void Usart_SendStr(USART_TypeDef* pUSARTx, char *str)
{
uint8_t i = 0;
do
{
Usart_SendByte(pUSARTx, *(str+i));
i++;
}while(*(str+i) != '\0');
// 等待发送完成
while(USART_GetFlagStatus(pUSARTx, USART_FLAG_TC) == RESET);
}
当USART收到数据即会执行中断函数,那么我们在stm32f10x_it.c中编写中断服务函数USART1_IRQHandler()。
void USART1_IRQHandler(void)
{
uint8_t ucTemp;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
ucTemp = USART_ReceiveData(USART1);
// 调用库函数,把接收到的数据发给串口调试助手
USART_SendData(USART1, ucTemp);
}
}
最后就是在main函数里调用以上的函数进行数据收发了。
int main(void)
{
USART_Config();
Usart_SendStr(USART1, "This is a test data.\n");
while(1);
}
用USB转串口线连接电脑和开发板,根据程序配置的参数调试串口助手的参数,把程序烧录到板子,便可以开始收发数据了。如下图的助手发送接收截图。
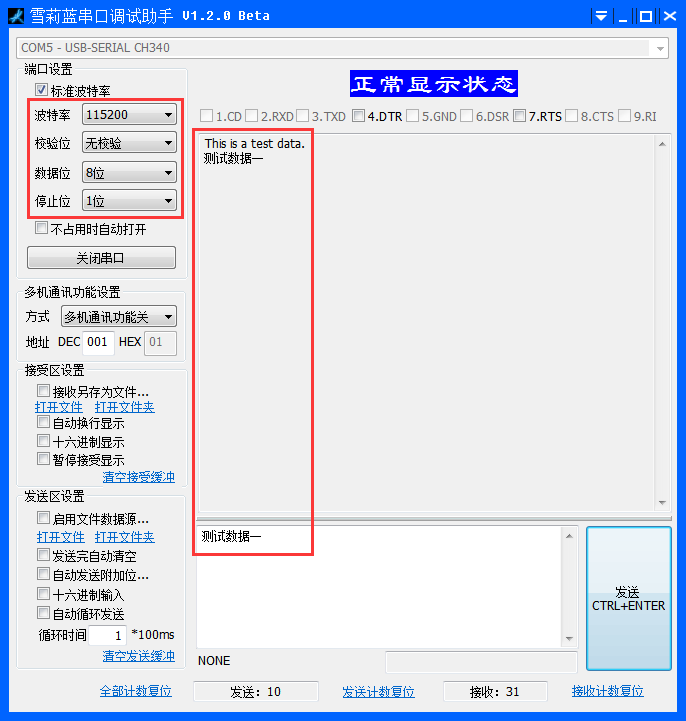 图11-2
图11-2
我们也可以利用收发的数据进而控制LED。有一点需要注意的是,如果想通过串口发送指令控制LED,那么就会涉及到字符读取,这时我们需要重定向c库函数scanf到串口,即重新定义fgetc函数。如果需要打印串口信息,同样也需要重定向printf函数。另外,需要在工程配置里需勾选“Use MicroLIB”。
/* 重定向c库函数printf */
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t)ch);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
return ch;
}
/* 重定向c库函数scanf */
int fgetc(FILE *f)
{
while(USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET);
return (int)USART_ReceiveData(USART1);
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号