CMOS模拟集成电路笔记 | 第二部分 | Chapter 4
第四章 差动放大器
4.1 单端和差动的工作方式
差动工作相比单端工作的优势:
-
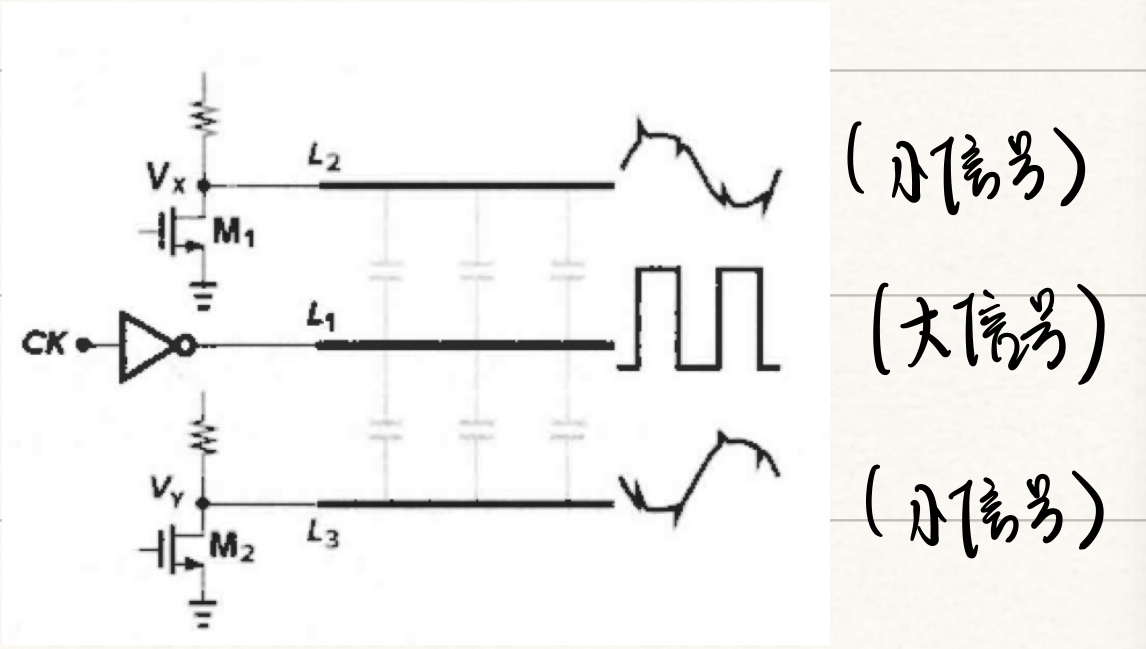
对环境噪声具有更强的抗干扰能力
小信号取差值可以消除大信号(时钟跃变)带来的干扰
-
更大的输出摆幅
4.2 基本差动对
4.2.1 定性分析
-
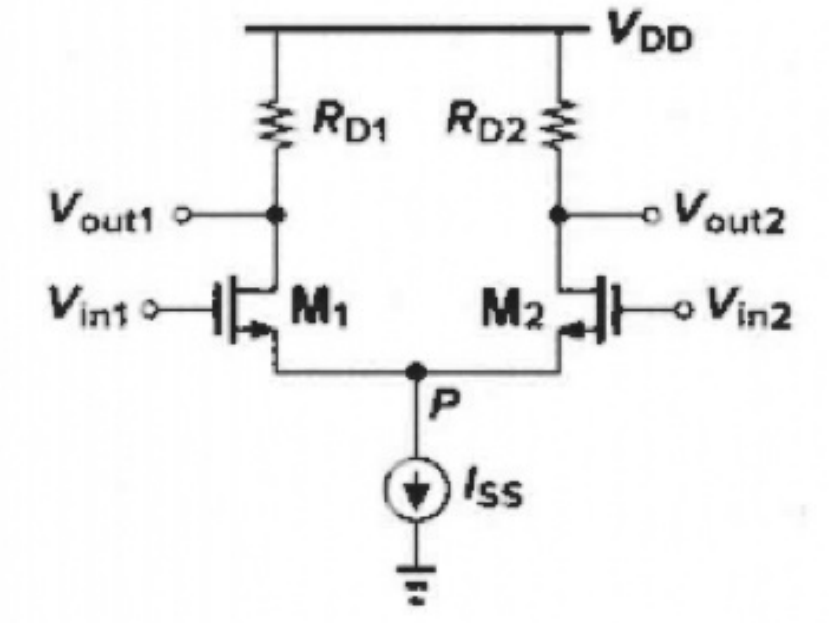
基本差动对
-
差动分析
分析:
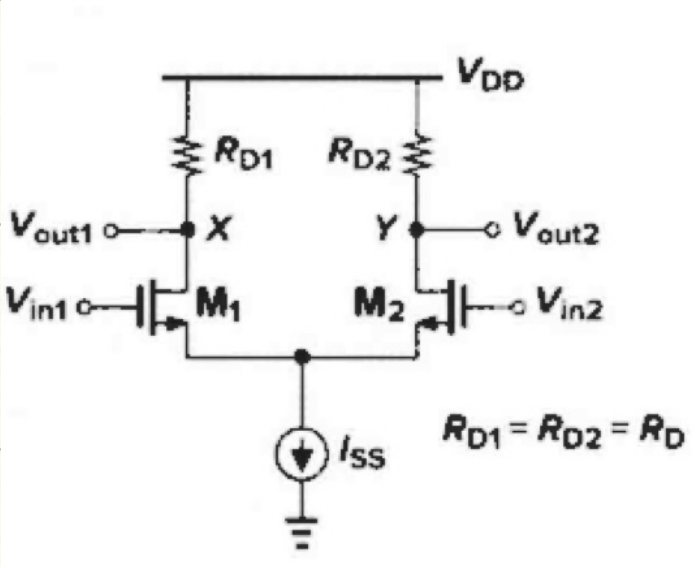
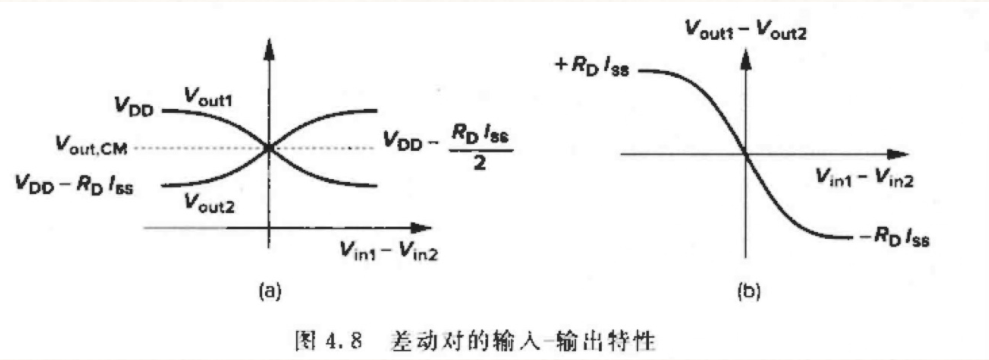
Vin1−Vin2 从−∞ 到 +∞ 变化,当 Vin1 非常小时,M1 截止,M2 导通,ID1=0,lD2=ISS,Vout1=VDD,Vout2=VDD−RD ×Iss。同理当 Vin2 也非常小时有类似结果。特别地,当电路处于平衡状态(Vin1=Vin2) ,ID1=ID2=Iss/2,Vout1=Vout2=VDD−ISS/2。
重要特性:
- 输出最大/最小电平与输入共模电平无关。
- 相比简单差动电路,随着输出摆幅的增大,电路变得更加非线性(图4.8(b))
-
共模特性
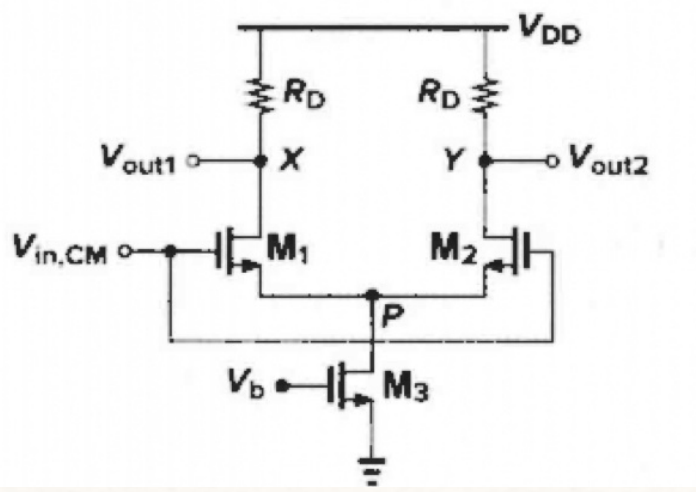
输入共模电平 Vin,CM 从 0 变化到 VDD
- 当 Vin,CM=0 时,M1,M2 截止,M3 在深线性区(因为 lD3=lD2=ID1=0,且 Vb>Vth,得到 Vp=0);
- 当 Vin 增大时,可以将 M3 当成一个电阻(因为在 VGS 不变的条件下,观察 lD 和 VDS 的关系可以知道,电流从 0 开始增大会先经过线性区),M1,M2 导通进入饱和区,ID1,ID2,lD3 也增大,Vp 也增大,
Vp大到一定程度使得 M3 进入饱和区;
- Vin 进一步增大会使得 M1,M2 进入线性区。
为使电路正常工作,输入共模电平范围为:
VCS1+(VGS3−VTH3)M1,M2导通,M3为饱和区和线性区边界⟹VP>VGS3−VTH3⩽Vin,CM⩽min[VDD−RDISS2+VTH,VDO]使M1,M2为饱和区和线性区边界⟹VGS1−VTH<Vout=VDD−12ISSRD
4.2.2 定量分析
-
定量分析
对差动对电路进行分析,确定 Vout1−Vout2与 Vin1−Vin2的函数关系:
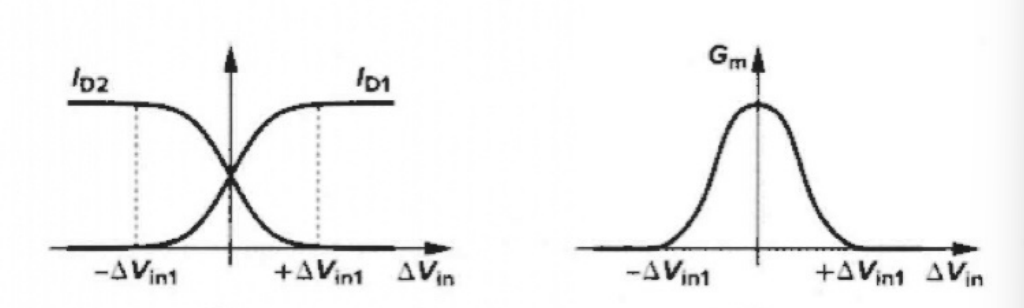
Vout1−Vout2=RD(ID2−ID1)=RDΔI=RDGmΔVin,(小信号)Gm=∂ΔID∂ΔVin=12μnCoxWL4ISSμnCoxW/L−2ΔV2in√4IssμnCoxW/L−ΔV2in
有漏极电流 ID1ID2 和总跨导 Gm 随输入电压变化曲线:
ΔVin1 为所有的 lss 流经一个晶体管,而另一个晶体管截止的情况。
ΔVinl=√2ISSμnCox(W/L)
-
小信号分析
-
叠加法分析
(分别考虑只有一个输入时对输出 Vout1 和 Vout2 的影响, 再将两种结果相加)
-
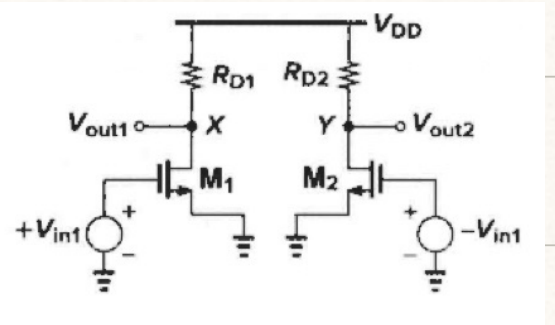
半边电路法(计算差模增益)
(找到交流地的点, 计算 Vx/Vin1 和 VY/−Vin1,再计算差模增益)
4.2.3 带源极负反馈的差动对
采用电阻负反馈可以提高线性度(简单分析 M1 导通,M2 截止的情况可得到,新电路使一边晶体管关断所需的差动电压的幅度增加,ΔVin1 变为 ΔVin2)
ΔVin2−ΔVin1=RSISS
4.3 共模响应
(差动对对共模扰动影响具有抑制能力,但是共模输入的变化会或多或少地传递到输出端)
-
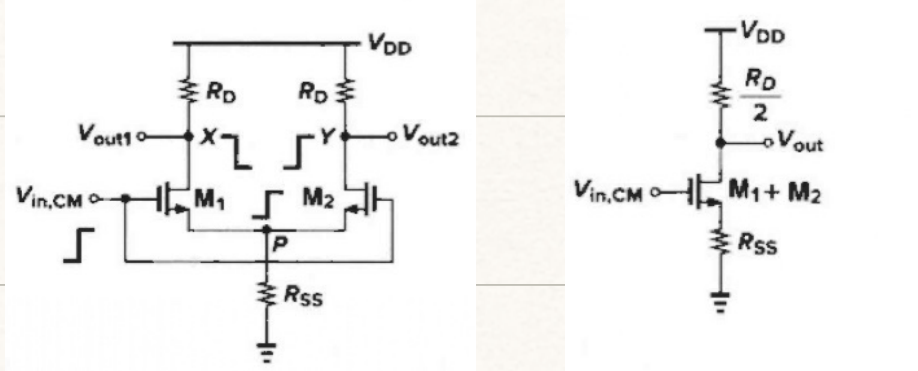
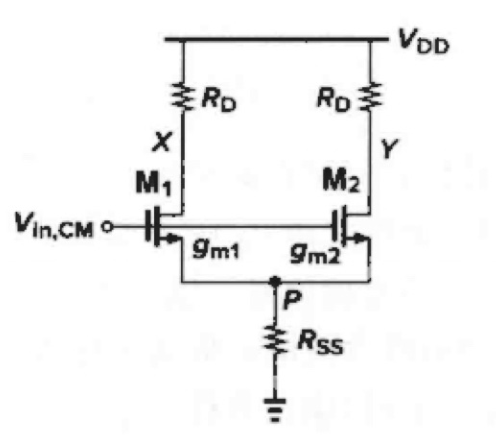
电流源具有有限的输出阻抗 RSS
共模输入的情况下 ID1=ID2,Vout1=Vout2,电路可以等效为下图
AV,CM=−RD/21/(2gm)+Rss
AV 表示共模输入的变化会传递到输出
-
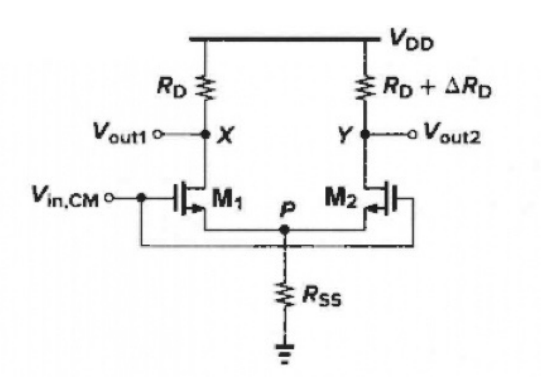
RD 电阻不对称且尾电流源的输出阻抗有限
ΔVX=−ΔVin,CMgm1+2gmRSSRDΔVY=−ΔVin,CMgm1+2gmRSS(RD+ΔRD)
分析:
VX、VY不相等,输入端共模的变化 ΔVin,CM 在输出端产生了一个差动成分 ΔRD,电路表现为共模到差模的转换
-
M1 管和 M2 管不匹配
Vx−VY=−gm1−gm2(gm1+gm2)˙RSS+1RDVin.CMACM−DM=−ΔgmRD(gm1+gm2)RSs+1
其中 ACM−DM 表示共模到差模的转换,且 Δgm=gm1−gm2
-
共模抑制比 CMRR
CMRR=∣∣∣ADMACM−DM∣∣∣(期望增益与非期望增益之比)
4.4 MOS为负载的差动对
(略)
4.5 吉尔伯特单元
(增益随控制电压变化而变化的差动对)
-
简单的可变增益放大器(VGA)
增益 AV=−gmRD 是尾电流源的函数,控制电压 Vcont 确定了尾电流的大小,从而决定了增益的大小
-
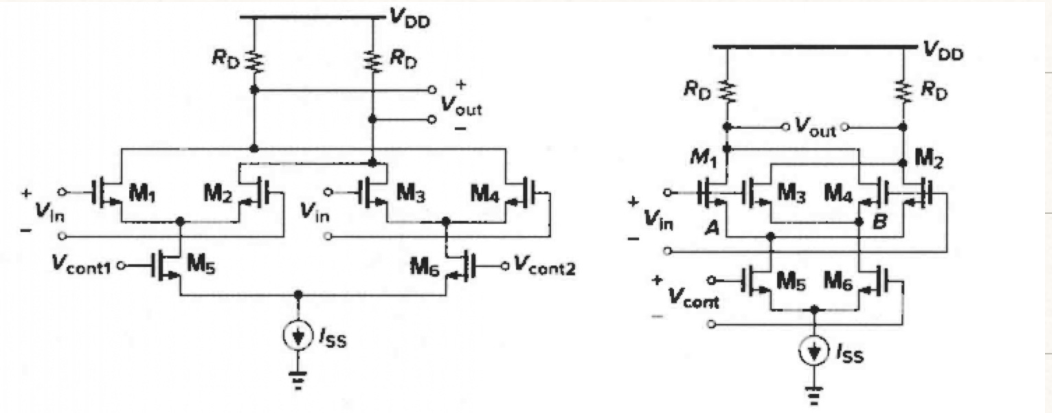
吉尔伯特单元
Vcont 控制增益,如果 Vcont 很大,M6 截止,ID6=0,ID3,4=0,M1,M2,M5 构成差动对, Vout=−gm⋅Ro;同理 Vcont 很小,Vout=gm⋅RD。






【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· winform 绘制太阳,地球,月球 运作规律
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人
· 上周热点回顾(3.3-3.9)
· AI 智能体引爆开源社区「GitHub 热点速览」
· 写一个简单的SQL生成工具