离散化算法 (Discretization Algorithm)
简介(Introduction)
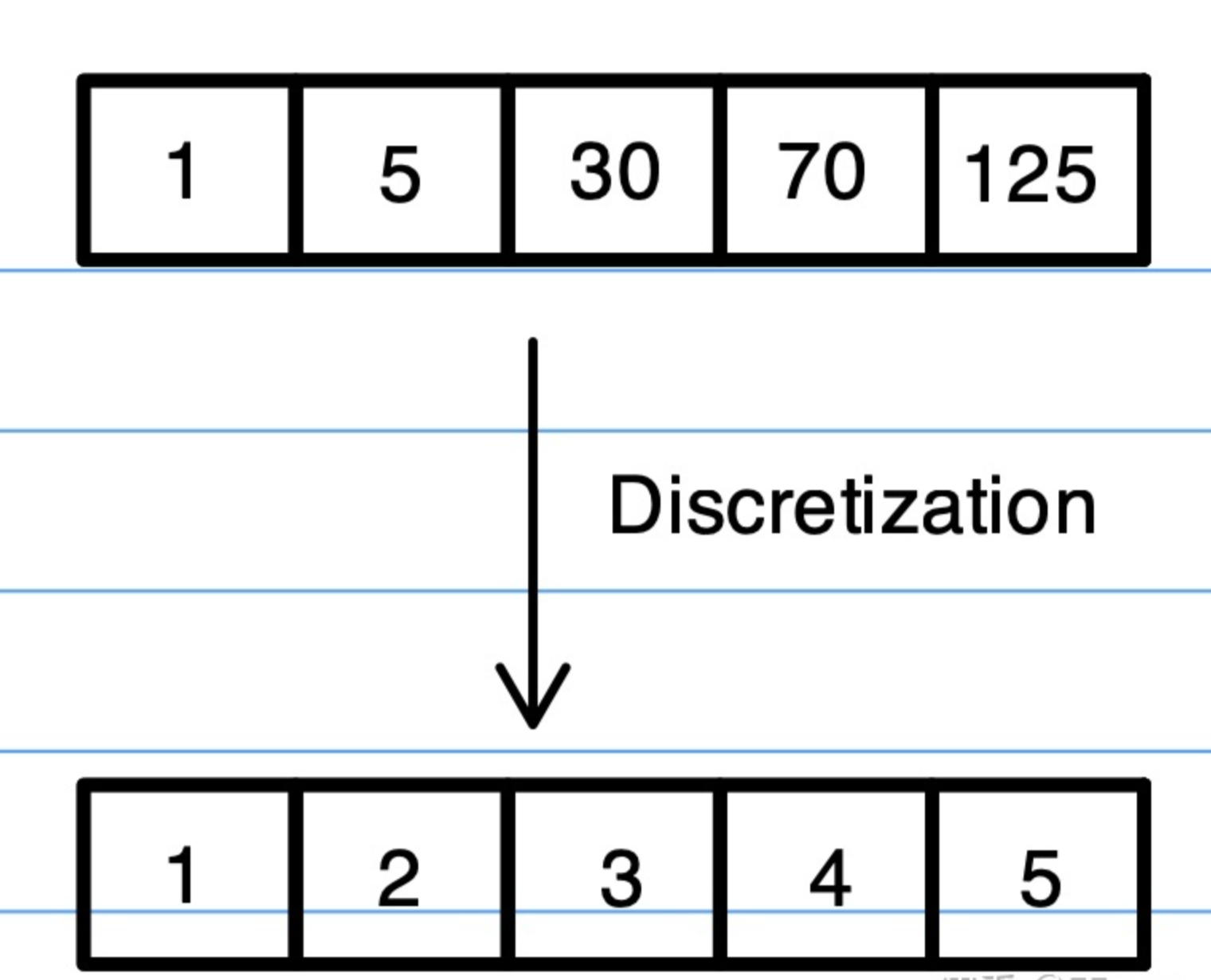
离散化 —— 把无限空间中有限的个体映射到有限的空间中去,以此提高算法的时空效率,即:在不改变数据相对大小的条件下,对数据进行相应的缩小。
离散化本质上可以看成是一种 哈希,其保证数据在哈希以后仍然保持原来的 全/偏序 关系。
描述(Description)
- 离散化用于处理一些个数不多,但是数据本身很大但是仍需要作为数组等无法过大的下标时,我们可以处理一下这些大的下标,并且依然保持其原序。
- 通俗地讲就是当有些数据因为本身很大或者类型不支持,自身无法作为数组的下标来方便地处理,而影响最终结果的只有元素之间的相对大小关系时,我们可以将原来的数据按照从大到小编号来处理问题
Tips:
1. 注意去重复元素
2. 快速保序映射
示例(Example)
代码(Code)
- 排序:
sort(a.begin(), a.end()); - 去重:
a.erase(unique(a.begin(), a.end()), a.end()); - 查找:
- 使用
std::lower_bound函数查找离散化之后的排名(即,新编号):
lower_bound(a + 1, a + len + 1, x) - a; // 查询 x 离散化后对应的编号 - 二分查找:
int find(int x) { int l = 0 , r = a.size() -1; while (l < r) { int mid = l + r >> 1; if (a[mid] >= x) r = mid; else l = mid + 1; } return l + 1; // 从1 ~ n的映射。 }
- 使用
应用(Application)
区间和
假定有一个无限长的数轴,数轴上每个坐标上的数都是 \(0\)
现在,我们首先进行 \(n\) 次操作,每次操作将某一位置 \(x\) 上的数加 \(c\) 。
接下来,进行 \(m\) 次询问,每个询问包含两个整数 \(l\) 和 \(r\) ,你需要求出在区间 \([l,r]\) 之间的所有数的和。输入格式
第一行包含两个整数 \(n\) 和 \(m\) 。 接下来 \(n\) 行,每行包含两个整数 \(x\) 和 \(c\) 。 再接下里 \(m\) 行,每行包含两个整数 \(l\) 和 \(r\) 。
输出格式
共 \(m\) 行,每行输出一个询问中所求的区间内数字和。
数据范围
\(−10^9\le x \le 10^9 ,\)
\(1 \le n,\ m\le 10^5,\)
\(−10^9 \le l \le r \le 10^9,\)
\(−10000 \le c \le 10000\)
输入样例:
3 3
1 2
3 6
7 5
1 3
4 6
7 8
输出样例:
8
0
5
- 分析:
- 由于坐标数据范围很大,但是数据量较小,考虑离散化处理所有坐标
- 最后要求区间和,可以使用前缀和来求
- 题解:
// C++ Version #include <iostream> #include <algorithm> using namespace std; typedef pair<int, int> pii; const int N = 3e5 + 10; int n, m; int a[N]; //用于前缀和计算 vector<pii> add, query; //用于存储输入 vector<int> all; //用于存储所有目标下标 /** * 二分查找 * @param x target * @return 从1 ~ n的映射,返回值需要加1 */ int find(int x) { int l = 0, r = all.size() - 1; while (l < r) { int mid = l + r >> 1; if (all[mid] >= x) r = mid; else l = mid + 1; } return l + 1; } int main() { scanf("%d%d", &n, &m); for (int i = 0; i < n; i ++ ) { int a, b; scanf("%d%d", &a, &b); add.push_back({a, b}); all.push_back(a); // 将有用的下标全部存入all } for (int i = 0; i < m; i ++ ) { int a, b; scanf("%d%d", &a, &b); query.push_back({a, b}); all.push_back(a); all.push_back(b); } //排序 sort(all.begin(), all.end()); //去重 all.erase(unique(all.begin(), all.end()), all.end()); //插入数据 for (auto &item: add) { a[find(item.first)] += item.second; //映射 } //预处理前缀和 for (int i = 1; i <= all.size(); i ++ ) a[i] += a[i - 1]; //前缀和 //查询 for (auto &item: query) { cout << a[find(item.second)] - a[find(item.first) - 1] << endl; } return 0; }
补充(Supplement)
-
对 \(vector\) 进行离散化:
vector<int> a, b; // b 是 a 的一个副本 sort(a.begin(), a.end()); a.erase(unique(a.begin(), a.end()), a.end()); for (int i = 0; i < n; ++i) b[i] = lower_bound(a.begin(), a.end(), b[i]) - a.begin(); -
对 \(map\) 映射进行离散化:
- 可以用 \(map\) (每次在 \(map\) 中查询一下这个值是否存在,如果存在则返回对应的值,否则对应另一个值)或 \(hash\) 表(即 \(unordered\_map\) 或手写 \(hash\) 表,运用方式和 \(map\) 相同)。
\(unordered\_map\) 与 \(map\) 的区别:
对于 \(map\) 的底层原理,是通过红黑树(一种非严格意义上的平衡二叉树)来实现的,\(map\) 内部所有的数据都是 有序 的(默认按 \(key\) 进行升序排序)
\(unordered\_map\) 和 \(map\) 类似,都是存储的 \(key-value\) 的值,可以通过 \(key\) 快速索引到 \(value\)。不同的是 \(unordered\_map\) 不会 根据 \(key\) 的大小进行排序,存储时是根据 \(key\) 的 \(hash\) 值判断元素是否相同,即 \(unordered\_map\) 内部元素是无序的。\(unordered\_map\) 的底层是一个防冗余的哈希表(开链法避免地址冲突)
时间复杂度:\(O(\log n)\)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号