
LINUX系统机器人
简介
在2016年,国内的软硬件尚不能有效支撑我们制造智能机器人,我们无法有效在Linux进行语音唤醒,只能使用斯坦福大学狮身人面像语音开源项目来进行英文识别我们对RIMA的呼唤,抗干扰性为0,意味着除了实验室这种安静环境,机器人将无法完成自主运行任务。
后来科大讯飞在2017年下半年推出了智能设备智能机器人的配套服务,使得智能机器人开发人员可以在Linux上使用可靠的智能机器人服务,但是价格高昂,试用仅3个月。
系统设计
纯Linux上的ROS机器人系统设计你既可以在ROS系统实现机器人通信、功能、控制,也可以跳出 ROS系统,经过我们测试catkin仅仅是便于roslaunch等操作系统命令以及c++编译,python这时体现出自己的优点。因为python是解释型语言,一方面可以避开编译错误这种错误,另一方面python程序文件可以不在catkin中放置,无论它在哪,只要文件中代码接入到了ROS通信系统中,就可以和ROS消息之间进行交互。这意味着加入我们使用python系统可以很方便的调整我们的系统架构,使得ROS系统和其他模块隔离开来,成为一个子系统。

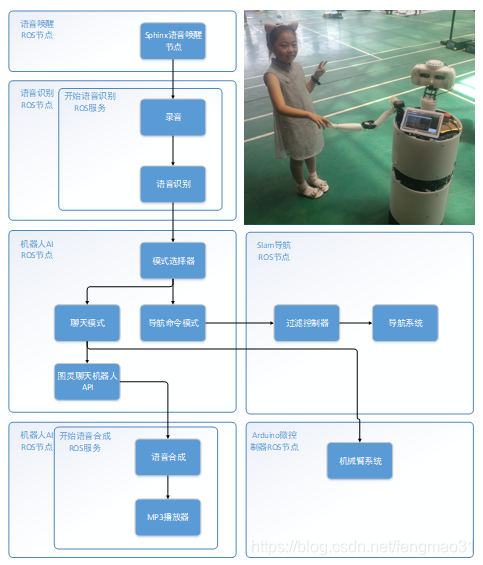
首先Sphinx就是斯坦福大学的开源语音项目,它识别出rima后唤醒语音识别服务,进行语音识别,之后根据模式选择发派给聊天及导航模块,机械臂模块,最后进行语音合成。
项目效果


演示视频 https://www.bilibili.com/d12ea0e3-c353-45ff-835c-40d3822b3051
