
算法+OpenCV】基于opencv的直线和曲线拟合与绘制(最小二乘法)
最小二乘法多项式曲线拟合,是常见的曲线拟合方法,有着广泛的应用,这里在借鉴最小二乘多项式曲线拟合原理与实现的原理的基础上,介绍如何在OpenCV来实现基于最小二乘的多项式曲线拟合。
概念
最小二乘法多项式曲线拟合,根据给定的m个点,并不要求这条曲线精确地经过这些点,而是曲线y=f(x)的近似曲线y= φ(x)。
原理
给定数据点pi(xi,yi),其中i=1,2,…,m。求近似曲线y= φ(x)。并且使得近似曲线与y=f(x)的偏差最小。近似曲线在点pi处的偏差δi= φ(xi)-y,i=1,2,...,m。
常见的曲线拟合方法:
1.使偏差绝对值之和最小
![]()
2.使偏差绝对值最大的最小
3.使偏差平方和最小
![]()
按偏差平方和最小的原则选取拟合曲线,并且采取二项式方程为拟合曲线的方法,称为最小二乘法。
推导过程:
1. 设拟合多项式为:

2.各点到这条曲线的距离之和,即偏差平方和如下:

3.为了求得符合条件的a值,对等式右边求ai偏导数,因而我们得到了:

.......

4.将等式左边进行一下化简,然后应该可以得到下面的等式:
.......
5.把这些等式表示成矩阵的形式,就可以得到下面的矩阵:
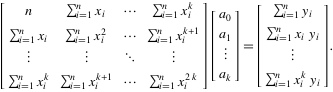
6.即X*A=Y。
我们只要解出这个线性方程,即可求得拟合曲线多项式的系数矩阵。而在opencv中,有一个专门用于求解线性方程的函数,即cv::solve(),具体调用形式如下:
- int cv::solve(
- cv::InputArray X, // 左边矩阵X, nxn
- cv::InputArray Y, // 右边矩阵Y,nx1
- cv::OutputArray A, // 结果,系数矩阵A,nx1
- int method = cv::DECOMP_LU // 估算方法
- );
int cv::solve( cv::InputArray X, // 左边矩阵X, nxn cv::InputArray Y, // 右边矩阵Y,nx1 cv::OutputArray A, // 结果,系数矩阵A,nx1 int method = cv::DECOMP_LU // 估算方法 );
我们只需要按照上述原理,构造出矩阵X和Y,即可调用该函数,计算出多项式的系数矩阵A。
opencv中支持的估算方法如下图所示:
实现如下:
- bool polynomial_curve_fit(std::vector<cv::Point>& key_point, int n, cv::Mat& A)
- {
- //Number of key points
- int N = key_point.size();
- //构造矩阵X
- cv::Mat X = cv::Mat::zeros(n + 1, n + 1, CV_64FC1);
- for (int i = 0; i < n + 1; i++)
- {
- for (int j = 0; j < n + 1; j++)
- {
- for (int k = 0; k < N; k++)
- {
- X.at<double>(i, j) = X.at<double>(i, j) +
- std::pow(key_point[k].x, i + j);
- }
- }
- }
- //构造矩阵Y
- cv::Mat Y = cv::Mat::zeros(n + 1, 1, CV_64FC1);
- for (int i = 0; i < n + 1; i++)
- {
- for (int k = 0; k < N; k++)
- {
- Y.at<double>(i, 0) = Y.at<double>(i, 0) +
- std::pow(key_point[k].x, i) * key_point[k].y;
- }
- }
- A = cv::Mat::zeros(n + 1, 1, CV_64FC1);
- //求解矩阵A
- cv::solve(X, Y, A, cv::DECOMP_LU);
- return true;
- }
bool polynomial_curve_fit(std::vector<cv::Point>& key_point, int n, cv::Mat& A)
{
//Number of key points
int N = key_point.size();
//构造矩阵X
cv::Mat X = cv::Mat::zeros(n + 1, n + 1, CV_64FC1);
for (int i = 0; i < n + 1; i++)
{
for (int j = 0; j < n + 1; j++)
{
for (int k = 0; k < N; k++)
{
X.at<double>(i, j) = X.at<double>(i, j) +
std::pow(key_point[k].x, i + j);
}
}
}
//构造矩阵Y
cv::Mat Y = cv::Mat::zeros(n + 1, 1, CV_64FC1);
for (int i = 0; i < n + 1; i++)
{
for (int k = 0; k < N; k++)
{
Y.at<double>(i, 0) = Y.at<double>(i, 0) +
std::pow(key_point[k].x, i) * key_point[k].y;
}
}
A = cv::Mat::zeros(n + 1, 1, CV_64FC1);
//求解矩阵A
cv::solve(X, Y, A, cv::DECOMP_LU);
return true;
}
测试代码如下:
- int main()
- {
- //创建用于绘制的深蓝色背景图像
- cv::Mat image = cv::Mat::zeros(480, 640, CV_8UC3);
- image.setTo(cv::Scalar(100, 0, 0));
- //输入拟合点
- std::vector<cv::Point> points;
- points.push_back(cv::Point(100., 58.));
- points.push_back(cv::Point(150., 70.));
- points.push_back(cv::Point(200., 90.));
- points.push_back(cv::Point(252., 140.));
- points.push_back(cv::Point(300., 220.));
- points.push_back(cv::Point(350., 400.));
- //将拟合点绘制到空白图上
- for (int i = 0; i < points.size(); i++)
- {
- cv::circle(image, points[i], 5, cv::Scalar(0, 0, 255), 2, 8, 0);
- }
- //绘制折线
- cv::polylines(image, points, false, cv::Scalar(0, 255, 0), 1, 8, 0);
- cv::Mat A;
- polynomial_curve_fit(points, 3, A);
- std::cout << "A = " << A << std::endl;
- std::vector<cv::Point> points_fitted;
- for (int x = 0; x < 400; x++)
- {
- double y = A.at<double>(0, 0) + A.at<double>(1, 0) * x +
- A.at<double>(2, 0)*std::pow(x, 2) + A.at<double>(3, 0)*std::pow(x, 3);
- points_fitted.push_back(cv::Point(x, y));
- }
- cv::polylines(image, points_fitted, false, cv::Scalar(0, 255, 255), 1, 8, 0);
- cv::imshow("image", image);
- cv::waitKey(0);
- return 0;
- }
int main()
{
//创建用于绘制的深蓝色背景图像
cv::Mat image = cv::Mat::zeros(480, 640, CV_8UC3);
image.setTo(cv::Scalar(100, 0, 0));
//输入拟合点
std::vector<cv::Point> points;
points.push_back(cv::Point(100., 58.));
points.push_back(cv::Point(150., 70.));
points.push_back(cv::Point(200., 90.));
points.push_back(cv::Point(252., 140.));
points.push_back(cv::Point(300., 220.));
points.push_back(cv::Point(350., 400.));
//将拟合点绘制到空白图上
for (int i = 0; i < points.size(); i++)
{
cv::circle(image, points[i], 5, cv::Scalar(0, 0, 255), 2, 8, 0);
}
//绘制折线
cv::polylines(image, points, false, cv::Scalar(0, 255, 0), 1, 8, 0);
cv::Mat A;
polynomial_curve_fit(points, 3, A);
std::cout << "A = " << A << std::endl;
std::vector<cv::Point> points_fitted;
for (int x = 0; x < 400; x++)
{
double y = A.at<double>(0, 0) + A.at<double>(1, 0) * x +
A.at<double>(2, 0)*std::pow(x, 2) + A.at<double>(3, 0)*std::pow(x, 3);
points_fitted.push_back(cv::Point(x, y));
}
cv::polylines(image, points_fitted, false, cv::Scalar(0, 255, 255), 1, 8, 0);
cv::imshow("image", image);
cv::waitKey(0);
return 0;
}
绘制结果:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号