
DeepLabV3+网络模型与源码解读
源码链接:
链接:https://pan.baidu.com/s/1GkUM9WiGpzUHuFgBe1t2rA
提取码:57zr
or
https://github.com/VainF/DeepLabV3Plus-Pytorch
以上两个连接是一样的,只不过百度盘中的包含voc数据。
环境安装:
先装pytorch&torchvision,再安装requirments.txt其他依赖
报错处理:
# error:raise ValueError("cannot allocate more than 256 colors") from e
# solution:将batch_size由16改为4
源码中,main.py既可以用于训练,也可以用于测试,命令行参数如下:
1 """ 2 训练: 3 --model deeplabv3plus_mobilenet 4 --gpu_id 0 5 --year 2012_aug 6 --crop_val 7 --lr 0.01 8 --crop_size 513 9 --batch_size 4 10 --output_stride 16 11 测试: 12 --model deeplabv3plus_mobilenet 13 --gpu_id 0 --year 2012_aug 14 --crop_val 15 --lr 0.01 16 --crop_size 513 17 --batch_size 16 18 --output_stride 16 19 --ckpt checkpoints/best_deeplabv3plus_mobilenet_voc_os16.pth 20 --test_only 21 --save_val_results 22 """
- 一、网络概述
- 二、BackBone
- 三、Neck:ASPP
- 3.1 空洞卷积
- 3.2 感受野
- 3.3 SPP
- 3.4 ASPP
- 四、Head:DeepLabHead
- 五、性能评估
- 六、模型部署
一、网络概述
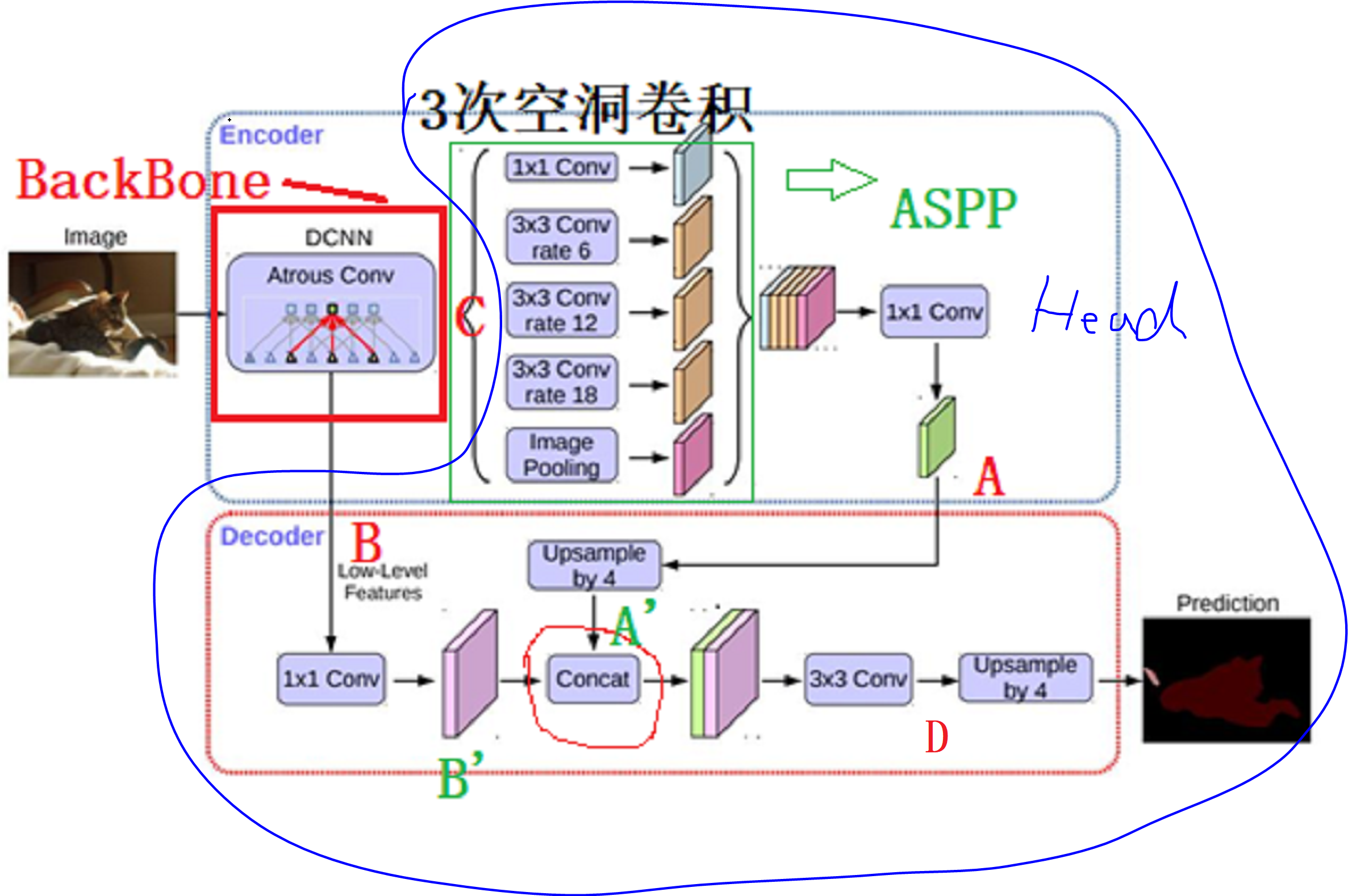
输入图像为:N*3*513*513,输出特征图为:N*C*513*513(N表示batch_size,C表示分类别数)。网络主要包含两部分:
EnCoder:一个BackBone和ASPP
Decoder:特征融合,进一步提取。
对于BackBone可选的有:resnet50、restnet101,mobilenet(v2版本,显然最快),代码会自动下载与训练模型,默认存储路径:C:\Users\shiruiyu\.cache\torch\hub\checkpoints 。如下图,BackBone即:DCNN(以restnet50为例),输出5组特征:
layer1、layer2、layer3、layer4、layer5;layer1表示low-Level Features,记为B,layer5表示高层特征,记为C。
将C输入到ASPP中得到A,然后上采样得到A‘,将B进一步处理得到B’,然后将A‘、B’叠加......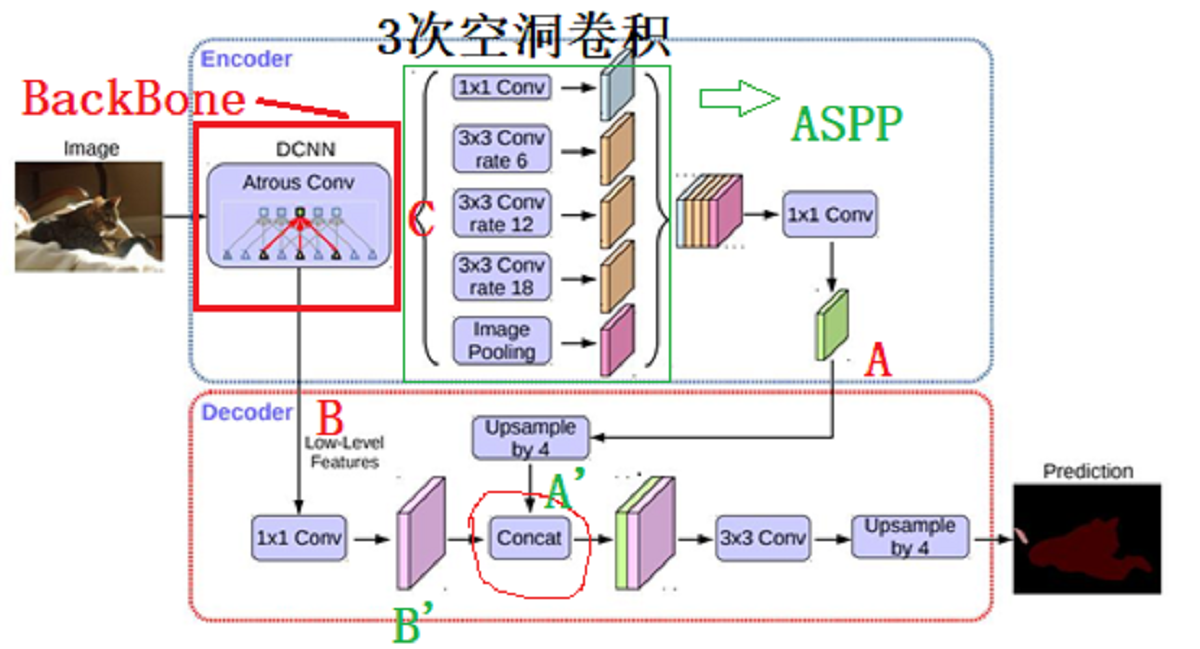
图1 网络框架图
二、BackBone
打开文件modeling.py文件,如下图:
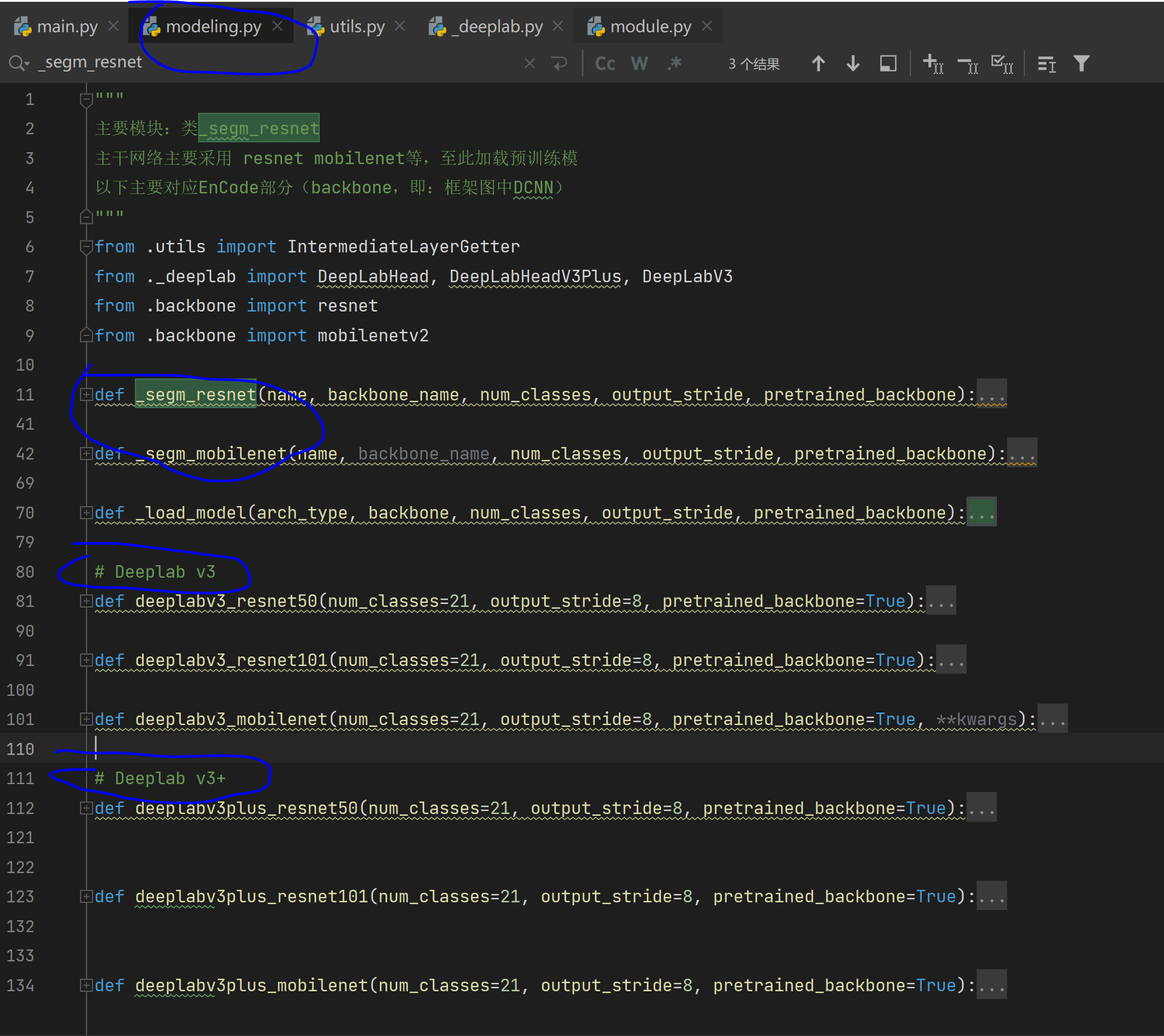
如上图,最下面6个函数表述读取6各种backbone各自的预训练模型,最上面的_segm_resnet、_segm_mobilenet表示对这6种backbone输出的多尺度特征图作处理,具体处理就是:拿出最高层、最低层特征图。在_deeplab.py文件中,我们以_segm_resnet()函数为例子,将resnet输出特征图中的其中两组重命名为: 'out'(如图1中B), 'low_level'(如图1中C),便于后续拿出。
1 def _segm_resnet(name, backbone_name, num_classes, output_stride, pretrained_backbone): 2 3 if output_stride==8: 4 replace_stride_with_dilation=[False, True, True] 5 aspp_dilate = [12, 24, 36] # 空洞卷积倍率 6 else: 7 replace_stride_with_dilation=[False, False, True] 8 aspp_dilate = [6, 12, 18] # 如图1,空洞卷积倍率 9 10 backbone = resnet.__dict__[backbone_name]( 11 pretrained=pretrained_backbone, 12 replace_stride_with_dilation=replace_stride_with_dilation) 13 14 inplanes = 2048 15 low_level_planes = 256 16 17 if name=='deeplabv3plus': 18 # eg:resnet输出5个尺度的特征图:layer1 layer2 layer3 layer4 layer5 19 # low_level:对应框架图中的B 20 # out:对应框架图中的C 21 return_layers = {'layer4': 'out', 'layer1': 'low_level'} 22 classifier = DeepLabHeadV3Plus(inplanes, low_level_planes, num_classes, aspp_dilate) 23 elif name=='deeplabv3': 24 return_layers = {'layer4': 'out'} 25 classifier = DeepLabHead(inplanes , num_classes, aspp_dilate) 26 # 提取网络的第几层输出结果并给一个别名 27 backbone = IntermediateLayerGetter(backbone, return_layers=return_layers) 28 29 model = DeepLabV3(backbone, classifier) 30 return model
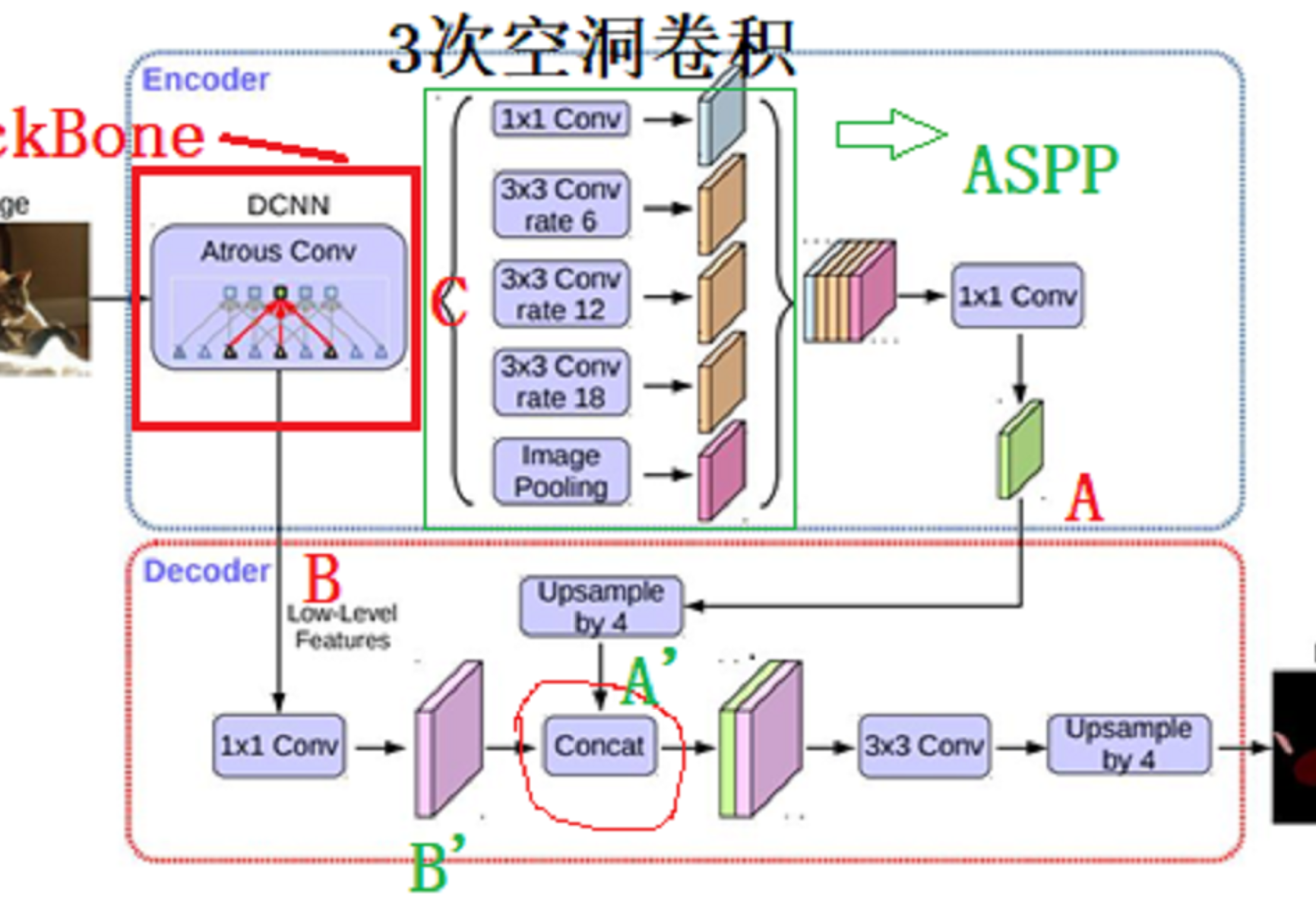
上面已经解释了如果拿到特征C、B,如下图,C由ASPP得到A,A经过4倍上采样得到A‘。B经过处理后得到B’,然后和A一起concat,然后作后面的处理。
三、Neck:ASPP
3.1 空洞卷积
越难预测的样本,往往需要更加全局的信息,空洞卷积提取大视野特征,可解决这个问题。
略
2014年 FCN
Xxxx年 DeepLabV3+(增加空洞卷积,增加感受野)
空洞卷积的优势:
- 图像分割任务中(其他场景也适用)需要较大感受野来更好完成任务
- 通过设置dilation rate参数来完成空洞卷积,并没有额外计算
- 可以按照参数扩大任意倍数的感受野,而且没有引入额外的参数
- 应用简单,就是卷积层中多设置一个参数就可以了
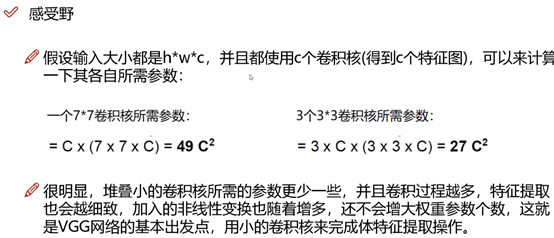
3.2 感受野
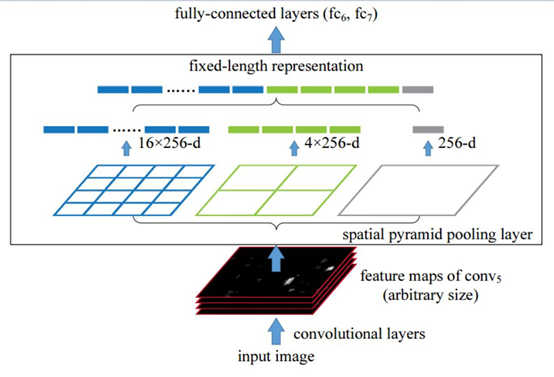
3.3 SPP(Spital pyramid pooling)
我在博客:yolov5中讲解过:https://www.cnblogs.com/winslam/p/14452136.html 但是当时理解深度不够,这里补充下:当网络中有FC层,此时输入图像分辨率必须是固定的;而当网络FC前接一个SPP层后,则输入图像分辨率将不在有任何限制。如下图,任意分辨率的图像经过卷积层后,分三条路走,分别是经过4*4、2*2、1*1的pooling,将得到16*256、4*256、1*256的特征图,然后concat一起,得到(16+4+1)*256的特征图,后续连接FC层。
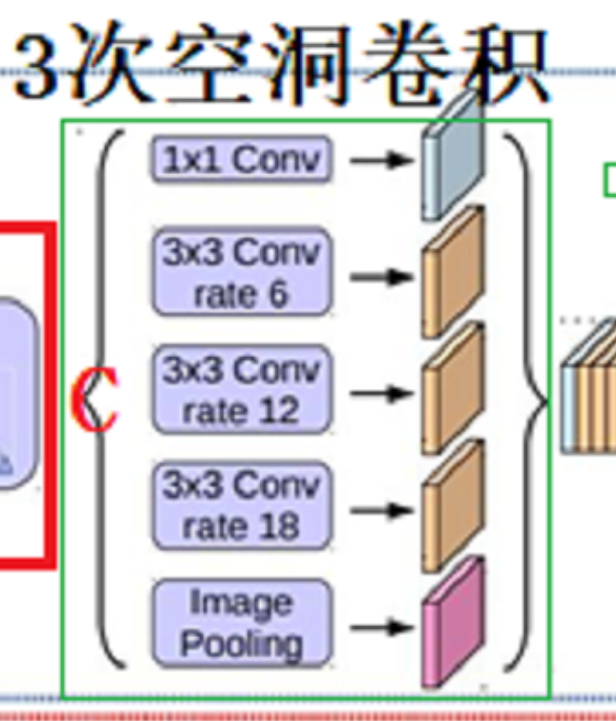
3.4 ASPP(atrous conv SPP)
ASPP差不多就是将SPP中的Pooling换成了空洞卷积,在文件_deeplab.py中,类ASPP代码如下:红色注释对应下图中ASPP的5个步骤:
1 # 如上图:输入特征C,输出特征A 2 class ASPP(nn.Module): 3 def __init__(self, in_channels, atrous_rates): 4 super(ASPP, self).__init__() 5 out_channels = 256 6 modules = [] 7 # 1×1 Conv 8 modules.append(nn.Sequential( 9 nn.Conv2d(in_channels, out_channels, 1, bias=False), 10 nn.BatchNorm2d(out_channels), 11 nn.ReLU(inplace=True))) 12 13 rate1, rate2, rate3 = tuple(atrous_rates) 14 # 3×3 Conv rate6 15 modules.append(ASPPConv(in_channels, out_channels, rate1)) 16 # 3×3 Conv rate12 17 modules.append(ASPPConv(in_channels, out_channels, rate2)) 18 # 3×3 Conv rate18 19 modules.append(ASPPConv(in_channels, out_channels, rate3)) 20 # Image Pooling 21 modules.append(ASPPPooling(in_channels, out_channels)) 22 23 self.convs = nn.ModuleList(modules) 24 25 self.project = nn.Sequential( 26 nn.Conv2d(5 * out_channels, out_channels, 1, bias=False), 27 nn.BatchNorm2d(out_channels), 28 nn.ReLU(inplace=True), 29 nn.Dropout(0.1),) 30 31 def forward(self, x): 32 res = [] 33 for conv in self.convs: 34 #print(conv(x).shape) 35 res.append(conv(x)) 36 res = torch.cat(res, dim=1) 37 return self.project(res)
四、Head:DeepLabHead
网络的head部分写在_deeplab.py文件中的类DeepLabHeadV3Plus,从代码看,Head部分包括如下图蓝圈部分,即:由B、C得到A‘、B’,之后concat+conv得到D,网络最后的“UpSample by 4”在文件utils.py中的类_SimpleSegmentationModel。
1 class DeepLabHeadV3Plus(nn.Module): 2 def __init__(self, in_channels, low_level_channels, num_classes, aspp_dilate=[12, 24, 36]): 3 super(DeepLabHeadV3Plus, self).__init__() 4 self.project = nn.Sequential( 5 nn.Conv2d(low_level_channels, 48, 1, bias=False), # 实验证明48比64好 6 nn.BatchNorm2d(48), 7 nn.ReLU(inplace=True), 8 ) 9 10 self.aspp = ASPP(in_channels, aspp_dilate) 11 12 self.classifier = nn.Sequential( 13 nn.Conv2d(304, 256, 3, padding=1, bias=False), 14 nn.BatchNorm2d(256), 15 nn.ReLU(inplace=True), 16 nn.Conv2d(256, num_classes, 1) 17 ) 18 self._init_weight() 19 20 def forward(self, feature): 21 # feature:见modeling.py文件中第28行 22 # low_level:对应上图中的B 23 # out:对应上图中的C 24 # 25 # B -> B‘ 26 low_level_feature = self.project( feature['low_level'] )#return_layers = {'layer4': 'out', 'layer1': 'low_level'} 27 #print(low_level_feature.shape) 28 # ASSP:C -> A 29 output_feature = self.aspp(feature['out']) 30 #print(output_feature.shape) 31 # (UpSample by 4):A -> A' 32 output_feature = F.interpolate(output_feature, size=low_level_feature.shape[2:], mode='bilinear', align_corners=False) 33 #print(output_feature.shape) 34 # concat(A',B') & 3*3 Conv 35 return self.classifier( torch.cat( [ low_level_feature, output_feature ], dim=1 ) ) 36 37 def _init_weight(self): 38 for m in self.modules(): 39 if isinstance(m, nn.Conv2d): 40 nn.init.kaiming_normal_(m.weight) 41 elif isinstance(m, (nn.BatchNorm2d, nn.GroupNorm)): 42 nn.init.constant_(m.weight, 1) 43 nn.init.constant_(m.bias, 0)
五、性能评估
学习下得了
六、性能评估
由于代码使用了预训练模型,例如mobilenet resnet Xception等作为BackBone提取特征,这部分网络没有在代码中定义,代码中定义的只有ASSP和EnCoder部分,所以torch_script导出的模型之后后半部分,这个有点蛋疼,暂时就懒得折腾了。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号