
一步一步复现loam<一>、rviz可视化rosbag发布的数据
一、在空的工作空间创建功能包
catkin_create_pkg aloam roscpp rospy rosbag nav_msgs geometry_msgs image_transport tf std_msgs sensor_msgs
后续发现依赖别的包,可以在package.xml中修改。


1 <?xml version="1.0"?> 2 <package format="2"> 3 <name>aloam</name> 4 <version>0.0.0</version> 5 <description>The aloam package</description> 6 7 <!-- One maintainer tag required, multiple allowed, one person per tag --> 8 <!-- Example: --> 9 <!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> --> 10 <maintainer email="sry@todo.todo">sry</maintainer> 11 12 13 <!-- One license tag required, multiple allowed, one license per tag --> 14 <!-- Commonly used license strings: --> 15 <!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 --> 16 <license>TODO</license> 17 18 19 <!-- Url tags are optional, but multiple are allowed, one per tag --> 20 <!-- Optional attribute type can be: website, bugtracker, or repository --> 21 <!-- Example: --> 22 <!-- <url type="website">http://wiki.ros.org/aloam</url> --> 23 24 25 <!-- Author tags are optional, multiple are allowed, one per tag --> 26 <!-- Authors do not have to be maintainers, but could be --> 27 <!-- Example: --> 28 <!-- <author email="jane.doe@example.com">Jane Doe</author> --> 29 30 31 <!-- The *depend tags are used to specify dependencies --> 32 <!-- Dependencies can be catkin packages or system dependencies --> 33 <!-- Examples: --> 34 <!-- Use depend as a shortcut for packages that are both build and exec dependencies --> 35 <!-- <depend>roscpp</depend> --> 36 <!-- Note that this is equivalent to the following: --> 37 <!-- <build_depend>roscpp</build_depend> --> 38 <!-- <exec_depend>roscpp</exec_depend> --> 39 <!-- Use build_depend for packages you need at compile time: --> 40 <!-- <build_depend>message_generation</build_depend> --> 41 <!-- Use build_export_depend for packages you need in order to build against this package: --> 42 <!-- <build_export_depend>message_generation</build_export_depend> --> 43 <!-- Use buildtool_depend for build tool packages: --> 44 <!-- <buildtool_depend>catkin</buildtool_depend> --> 45 <!-- Use exec_depend for packages you need at runtime: --> 46 <!-- <exec_depend>message_runtime</exec_depend> --> 47 <!-- Use test_depend for packages you need only for testing: --> 48 <!-- <test_depend>gtest</test_depend> --> 49 <!-- Use doc_depend for packages you need only for building documentation: --> 50 <!-- <doc_depend>doxygen</doc_depend> --> 51 <buildtool_depend>catkin</buildtool_depend> 52 <build_depend>geometry_msgs</build_depend> 53 <build_depend>image_transport</build_depend> 54 <build_depend>nav_msgs</build_depend> 55 <build_depend>rosbag</build_depend> 56 <build_depend>roscpp</build_depend> 57 <build_depend>rospy</build_depend> 58 <build_depend>sensor_msgs</build_depend> 59 <build_depend>std_msgs</build_depend> 60 <build_depend>tf</build_depend> 61 <build_export_depend>geometry_msgs</build_export_depend> 62 <build_export_depend>image_transport</build_export_depend> 63 <build_export_depend>nav_msgs</build_export_depend> 64 <build_export_depend>rosbag</build_export_depend> 65 <build_export_depend>roscpp</build_export_depend> 66 <build_export_depend>rospy</build_export_depend> 67 <build_export_depend>sensor_msgs</build_export_depend> 68 <build_export_depend>std_msgs</build_export_depend> 69 <build_export_depend>tf</build_export_depend> 70 <exec_depend>geometry_msgs</exec_depend> 71 <exec_depend>image_transport</exec_depend> 72 <exec_depend>nav_msgs</exec_depend> 73 <exec_depend>rosbag</exec_depend> 74 <exec_depend>roscpp</exec_depend> 75 <exec_depend>rospy</exec_depend> 76 <exec_depend>sensor_msgs</exec_depend> 77 <exec_depend>std_msgs</exec_depend> 78 <exec_depend>tf</exec_depend> 79 80 81 <!-- The export tag contains other, unspecified, tags --> 82 <export> 83 <!-- Other tools can request additional information be placed here --> 84 85 </export> 86 </package>
二、添加依赖库
package.xml中,不用修改,在CMakelist中添加如下内容:
add_executable(ascanRegistration src/scanRegistration.cpp)
target_link_libraries(ascanRegistration ${catkin_LIBRARIES} ${PCL_LIBRARIES} ${OpenCV_LIBS})
在功能包src目录下新建 scanRegistration.cpp,准备编码。
在CMakelist中添加第三方依赖库:OpenCV、PCL、Eigen等等。
1 cmake_minimum_required(VERSION 3.0.2) 2 project(aloam) 3 4 ## Compile as C++11, supported in ROS Kinetic and newer 5 # add_compile_options(-std=c++11) 6 set(CMAKE_BUILD_TYPE "Release") 7 set(CMAKE_CXX_FLAGS "-std=c++14") 8 set(CMAKE_CXX_FLAGS_RELEASE "-O3 -Wall -g") 9 10 ## Find catkin macros and libraries 11 ## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz) 12 ## is used, also find other catkin packages 13 find_package(catkin REQUIRED COMPONENTS 14 geometry_msgs 15 image_transport 16 nav_msgs 17 rosbag 18 roscpp 19 rospy 20 sensor_msgs 21 std_msgs 22 cv_bridge 23 tf 24 ) 25 26 find_package(PCL REQUIRED) 27 find_package(OpenCV REQUIRED) 28 29 30 include_directories( 31 include 32 ${catkin_INCLUDE_DIRS} 33 ${PCL_INCLUDE_DIRS} 34 ${OpenCV_INCLUDE_DIRS} 35 ) 36 37 catkin_package( 38 # INCLUDE_DIRS include 39 # LIBRARIES aloam 40 CATKIN_DEPENDS geometry_msgs image_transport nav_msgs rosbag roscpp rospy sensor_msgs std_msgs tf 41 DEPENDS EIGEN3 PCL 42 INCLUDE_DIRS include 43 # DEPENDS system_lib 44 ) 45 46 47 48 49 add_executable(ascanRegistration src/scanRegistration.cpp) 50 target_link_libraries(ascanRegistration ${catkin_LIBRARIES} ${PCL_LIBRARIES} ${OpenCV_LIBS})
三、开始编码
我们可以采用rosbag播放数据,直接拿rviz作可视化,参考我的博客:https://www.cnblogs.com/winslam/p/15064478.html
现在咱们顺序是:rosbag播放数据 -> 算法处理 -> rviz可视化,如下图:
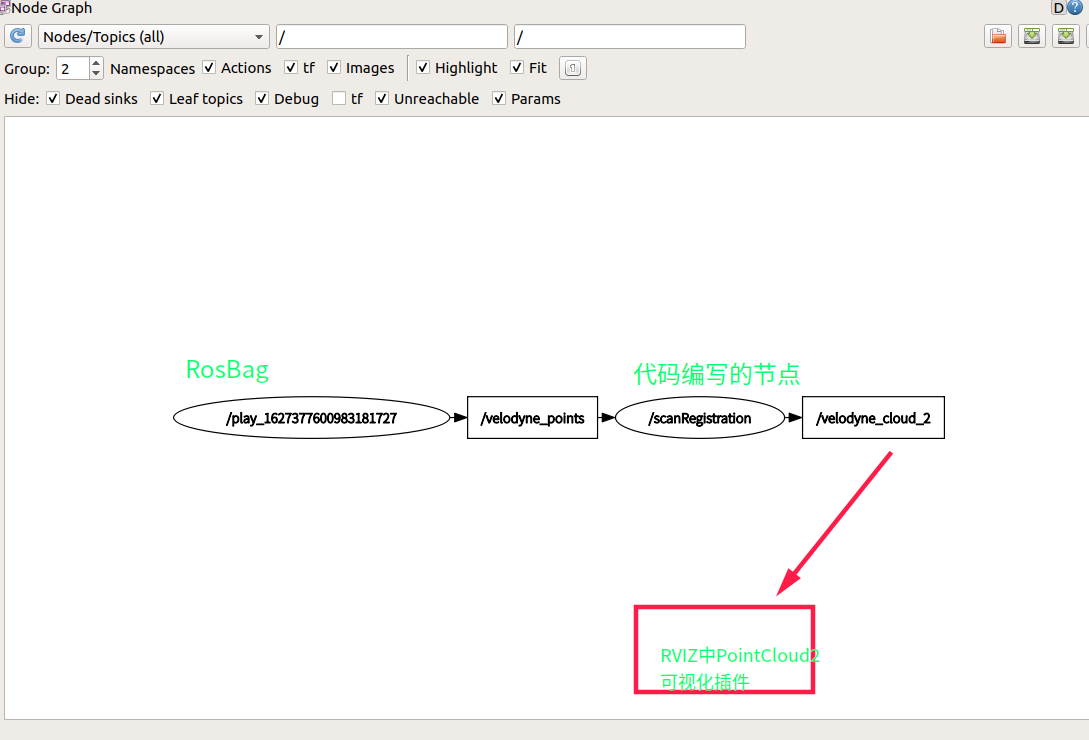
知道框架以后,就可以编码了,已知:
rosbag发布节点:/velodyne_points #默认 自定义帧ID:/camera_init 自定义发布节点:velodyne_cloud_2
1 // 2 // Created by sry on 2021/7/26. 3 // 4 #include <iostream> 5 #include<opencv2/opencv.hpp> 6 7 #include<ros/ros.h> 8 #include <pcl/point_cloud.h> 9 #include <pcl_conversions/pcl_conversions.h> 10 #include<sensor_msgs/PointCloud2.h> 11 #include<tf/transform_datatypes.h> 12 13 typedef pcl::PointXYZI PointType; 14 //pcl::PointCloud<PointType> g_Points; 15 ros::Publisher pubLaserCloud; 16 17 // 激光点云接收函数 18 void laserCloudHandler(const sensor_msgs::PointCloud2ConstPtr &laserCloudMsg) 19 { 20 // 接受 topic:velodyne_points 发布的点云 21 pcl::PointCloud<pcl::PointXYZ> laserCloudIn; 22 pcl::fromROSMsg(*laserCloudMsg, laserCloudIn); 23 std::cout << laserCloudIn.points.size() << "; w = " << laserCloudIn.width << "; h = " << laserCloudIn.height << std::endl; 24 25 // pcl -> ros 26 sensor_msgs::PointCloud2 laserCloudOutMsg; 27 pcl::toROSMsg(laserCloudIn, laserCloudOutMsg); 28 laserCloudOutMsg.header.stamp = laserCloudMsg->header.stamp; 29 laserCloudOutMsg.header.frame_id = "/camera_init"; 30 // 发布 31 pubLaserCloud.publish(laserCloudOutMsg); 32 33 34 } 35 36 int main(int argc, char** argv) 37 { 38 ros::init(argc, argv, "scanRegistration"); 39 ros::NodeHandle nh; 40 // parameter 41 // 订阅 42 ros::Subscriber subLaserCloud = nh.subscribe<sensor_msgs::PointCloud2>("/velodyne_points", 100, laserCloudHandler); 43 // 发送到插件 44 pubLaserCloud = nh.advertise<sensor_msgs::PointCloud2>("velodyne_cloud_2", 100); 45 ros::spin(); // 循环等待 46 return 1; 47 }
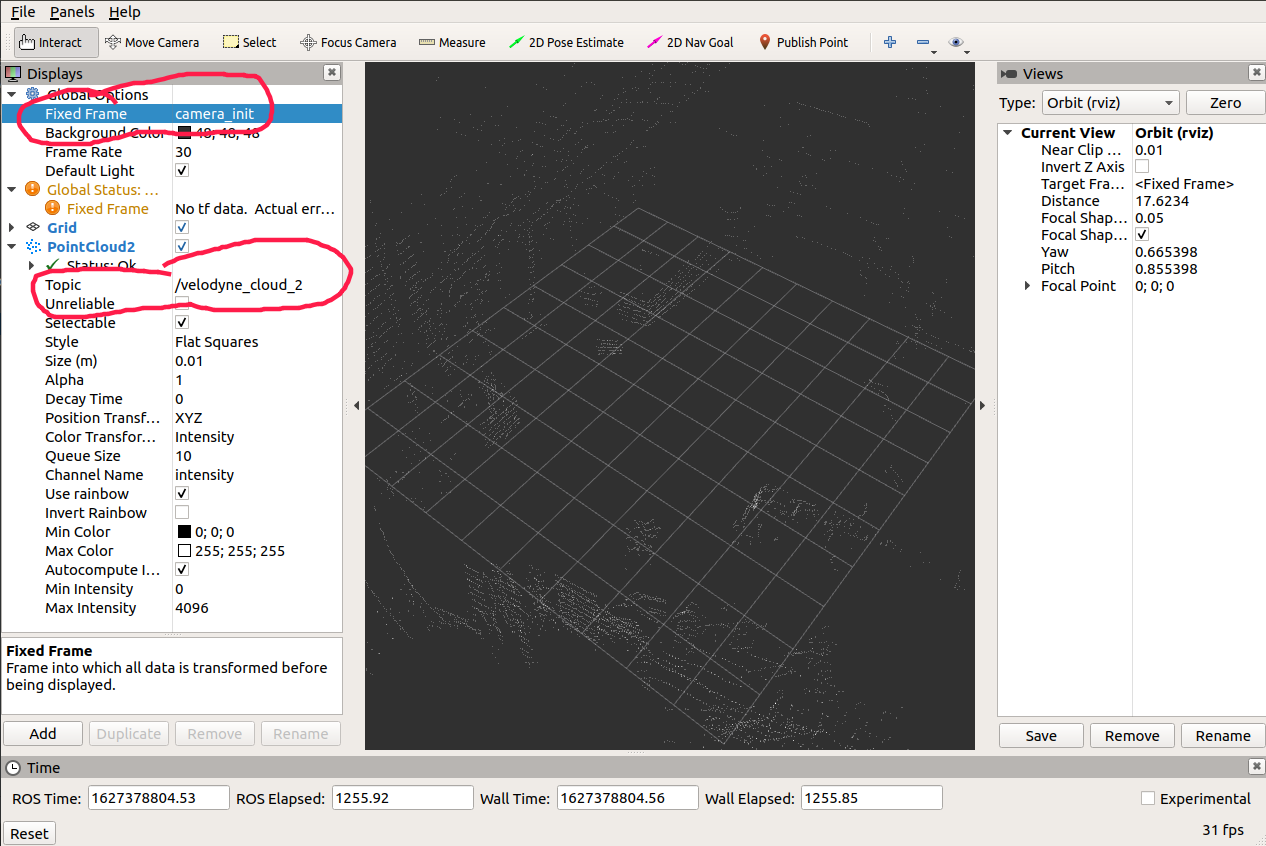
四、可视化
点击add -> PointCloud2,修改如下图两个位置:
CV&DL

 浙公网安备 33010602011771号
浙公网安备 33010602011771号