RVIZ教程1:显示Markers
一、创建功能包
catkin_create_pkg using_markers roscpp visualization_msgs
二、键入代码
新增CMakeLists.txt
1 add_executable(basic_shapes src/basic_shapes.cpp) 2 target_link_libraries(basic_shapes ${catkin_LIBRARIES})
在功能包的src下新增代码basic_shapes.cpp:
1 // 2 // Created by sry on 2021/7/27. 3 // 4 5 #include<ros/ros.h> 6 #include<visualization_msgs/Marker.h> 7 8 int main(int argc, char** argv) 9 { 10 ros::init(argc, argv, "basic_shapes"); 11 ros::NodeHandle n; 12 ros::Rate r(1); 13 ros::Publisher marker_pub = n.advertise<visualization_msgs::Marker>("visualization_marker", 1); 14 15 // 初始化shape为cube 16 uint32_t shape = visualization_msgs::Marker::CUBE; 17 18 while(ros::ok()) 19 { 20 visualization_msgs::Marker marker; 21 // 设置帧ID和时间戳 22 marker.header.frame_id = "/my_frame"; 23 marker.header.stamp = ros::Time::now(); 24 // Set the namespace and id for this marker. This serves to create a unique ID 25 // Any marker sent with the same namespace and id will overwrite the old one 26 marker.ns = "basic_shapes"; 27 marker.id = 0; 28 // Set the marker type. Initially this is CUBE, and cycles between that and SPHERE, ARROW, and CYLINDER 29 marker.type = shape; 30 // Set the marker action. Options are ADD, DELETE, and new in ROS Indigo: 3 (DELETEALL) 31 marker.action = visualization_msgs::Marker::ADD; 32 // Set the pose of the marker. This is a full 6DOF pose relative to the frame/time specified in the header 33 marker.pose.position.x = 0; 34 marker.pose.position.y = 0; 35 marker.pose.position.z = 0; 36 marker.pose.orientation.x = 0.0; 37 marker.pose.orientation.y = 0.0; 38 marker.pose.orientation.z = 0.0; 39 marker.pose.orientation.w = 1.0; 40 41 // 设置缩放 42 marker.scale.x = 1.0; 43 marker.scale.y = 1.0; 44 marker.scale.z = 1.0; 45 46 // 设置颜色 47 marker.color.r = 0.0f; 48 marker.color.g = 1.0f; 49 marker.color.b = 0.0f; 50 marker.color.a = 1.0; 51 52 marker.lifetime = ros::Duration(); // 生命周期 53 // 发布marker 54 while(marker_pub.getNumSubscribers() < 1) 55 { 56 if (!ros::ok()) 57 { 58 return 0; 59 } 60 ROS_WARN_ONCE("Please create a subscriber to the marker"); 61 sleep(1); 62 } 63 marker_pub.publish(marker); 64 65 // Cycle between different shapes 66 switch (shape) 67 { 68 case visualization_msgs::Marker::CUBE: 69 shape = visualization_msgs::Marker::SPHERE; 70 break; 71 72 case visualization_msgs::Marker::SPHERE: 73 shape = visualization_msgs::Marker::ARROW; 74 break; 75 76 case visualization_msgs::Marker::ARROW: 77 shape = visualization_msgs::Marker::CYLINDER; 78 break; 79 80 case visualization_msgs::Marker::CYLINDER: 81 shape = visualization_msgs::Marker::MESH_RESOURCE; 82 break; 83 84 case visualization_msgs::Marker::MESH_RESOURCE: 85 shape = visualization_msgs::Marker::CUBE; 86 break; 87 } 88 r.sleep(); 89 } 90 91 92 return -1; 93 }
三、利用RVIZ显示
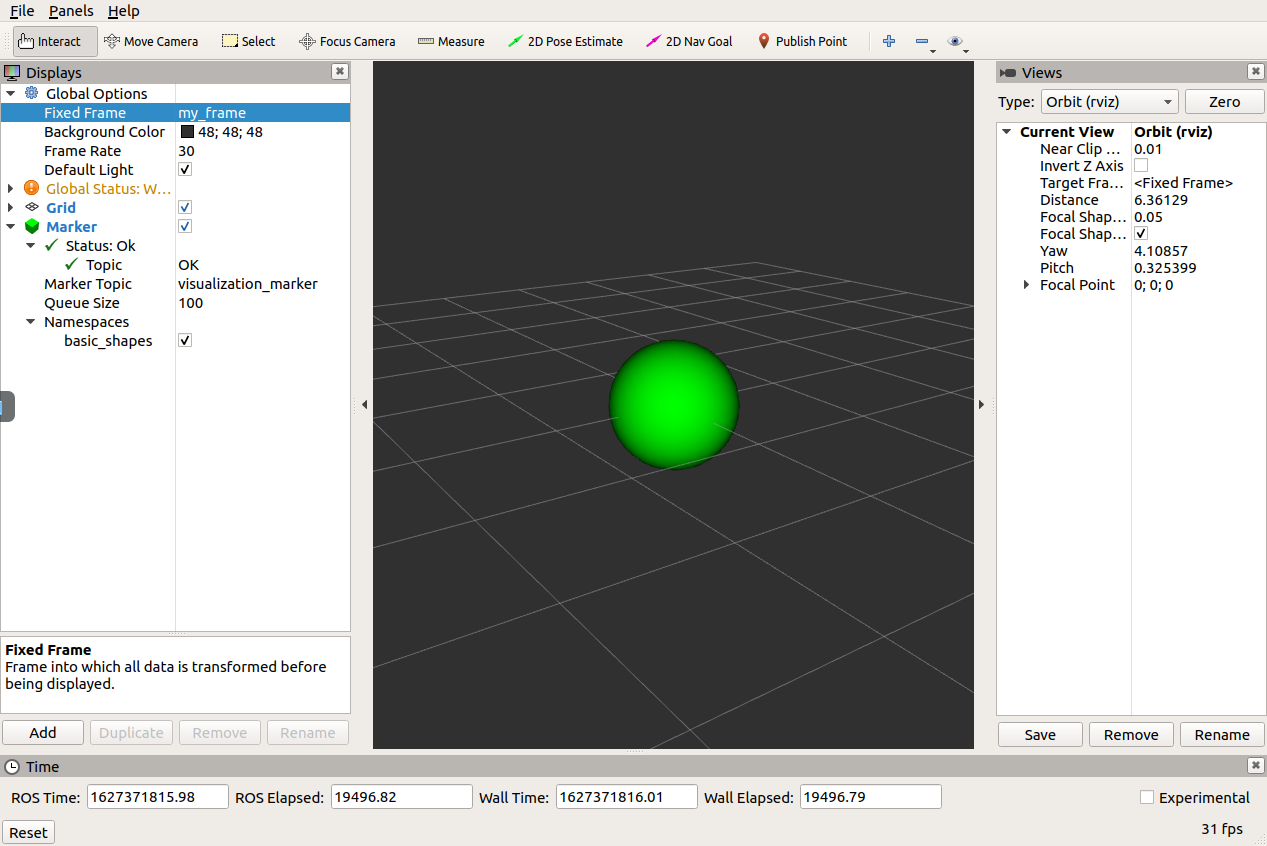
在命令行启动RVIZ,点击Add -> Marker -> 选择topic为:visualization_marker,将Fixed Frame修改为:/my_frame 。
CV&DL

 浙公网安备 33010602011771号
浙公网安备 33010602011771号