ROS(五)----服务通信
服务通信,通过服务端客户端 ,请求响应的同步模式进行通信。
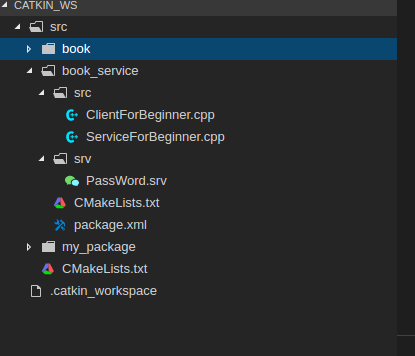
一、工程结构
二、自定义srv
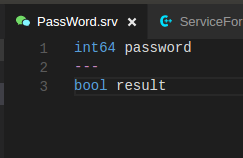
使用 ---进行分割
上边为 :resquest
下边为:response
添加.srv 文件后 ,CMakeLists.txt
add_service_files(FILES
PassWord.srv
)
generate_messages(DEPENDENCIES
std_msgs
)
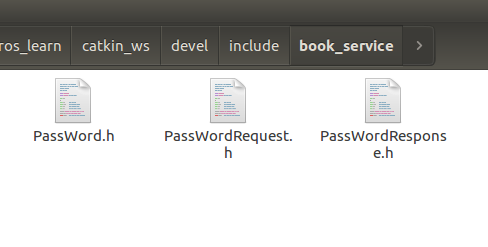
编译后:
三、 服务端 和 客户端示例
服务端
#include"ros/ros.h" #include"book_service/PassWord.h" #include <cstdlib> using namespace std; // server callback function bool serverCallback(book_service::PassWord::Request &req, book_service::PassWord::Response &res) { res.result = (req.password==741963)? true:false; return true; } int main(int argc,char** argv) { // initial node and name ros::init(argc, argv, "server_node"); // create nodeHandle ros::NodeHandle nh; ros::ServiceServer serv = nh.advertiseService("pswserver",&serverCallback); // 创建服务器 指定回调函数 ros::spin(); return 0; }
客户端
#include "ros/ros.h" #include "book_service/PassWord.h" #include <cstdlib> using namespace std; int main(int argc,char** argv) { // initial node and name ros::init(argc,argv,"node_client"); ros::NodeHandle nh; ros::ServiceClient client = nh.serviceClient<book_service::PassWord>("pswserver",100); book_service::PassWord srv; //服务信息 .srv if(argc < 2) { ROS_INFO("input error!"); return 0; } srv.request.password=atoi(argv[1]); if(client.call(srv)) { ROS_INFO("client connect success!"); if(srv.response.result) { ROS_INFO("password is correct!!"); } else { ROS_INFO("password is error!!"); } } else { ROS_INFO("client connect fail !!!!!!"); } return 0; }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号