
ubuntu16.04下笔记本自带摄像头编译运行PTAM
ubuntu16.04下笔记本自带摄像头编译运行PTAM
转载请注明链接:https://i.cnblogs.com/EditPosts.aspx?postid=9014147
个人邮箱:feifanrensheng1@outlook.com
北航飞控一体化技术重点实验室
PTAM是视觉slam的一种开源算法,并做了关于增强现实的应用。代码是完全开源的,可以从github上获取:地址
作者2008年的文章 Parallel tracking and mapping for Small AR workspaces
支持多个系统上编译运行,可以在作者的项目主页上获取一些在其他系统上的安装教程,作者主页:http://www.robots.ox.ac.uk/~gk/
我主要尝试在ubuntu16.04上尝试对ptam进行编译安装。
具体的安装过程
一 依赖库的安装
1 安装 build工具
sudo apt-get update sudo apt-get install build-essential cmake pkg-config
2 更新C++库
sudo apt-get install libboost-dev libboost-doc
3 安装线性代数的低级库
sudo apt-get install liblapack-dev libblas-dev
4 图像IO 和 摄像机驱动
sudo apt-get install libjpeg-dev libpng-dev libtiff-dev libdc1394-22-dev libv4l-dev
5 视频IO, 编解码和 视频显示库
sudo apt-get install libavcodec-dev libavformat-dev libavutil-dev libpostproc-dev libswscale-dev libavdevice-dev libsdl-dev sudo apt-get install libgtk2.0-dev libgstreamer0.10-dev libgstreamer-plugins-base0.10-dev
6 OpenGL
sudo apt-get install mesa-common-dev libgl1-mesa-dev libglu1-mesa-dev freeglut3-de
二 我们要安装ptam的三个第三方库
TooN libcvd Gvars3有依赖关系,所以一定要按照顺序安装,还有就是他们的版本问题也可能造成安装不成功,所以,推荐采用以下的版本搭配,我经过验证是可以编译成功的,在https://github.com/slowlythinking/PTAM 中获得(其中也包含PTAM的源码,但是存在问题);
TooN库一定要先安装
从git上获取这三个库
git clone https://github.com/slowlythinking/PTAM.git
然后把其中的PTAM文件夹删除,里面的文件存在问题,我们要重新编译。
TooN:
cd TooN sudo ./configure && make && sudo make install cd ../
libcvd:
cd libcvd sudo ./configure --without-ffmpeg --without-v4lbuffer --without-dc1394v1 --without-dc1394v2 sudo make sudo make install cd ../
Gvars3:
sudo git clone git://github.com/edrosten/gvars.git cd gvars sudo ./configure --disable-widgets sudo make sudo make install
最后,使安装后的libs生效
cd ../
sudo ldconfig
opencv的安装可以根据网上的教程自行安装。
三 编译PTAM
进入之前的PTAM目录,从github上获取最新的ptam源码
git clone https://github.com/Oxford-PTAM/PTAM-GPL.git ptam cd ptam git checkout feature/Linuxmint15 cd Src make
编译成功会得到CameraCalibrator, PTAM两个可执行文件,CameraCalibrator用于预先对相机进行校正
四 运行PTAM
首先你需要下载一个棋盘格图片,执行相机标定,
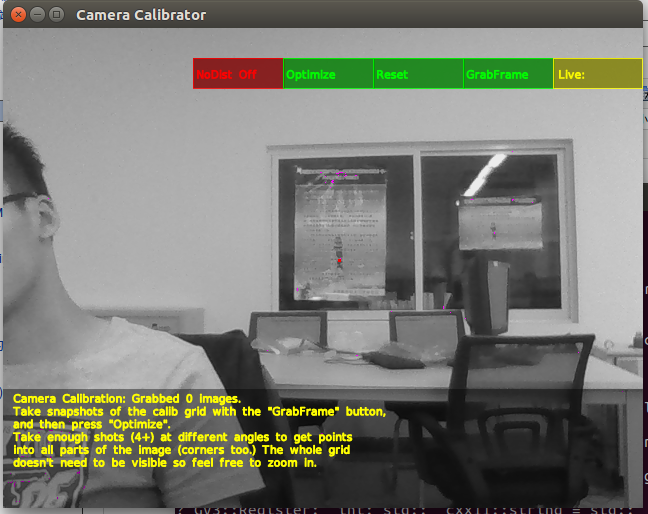
进入到上一步的Src目录,执行./CameraCalibrator,根据提示,使用下图右上角的CapFrame取帧,至少取不同角度的4帧以上,取帧结束以后,按下Optimize,计算相机本质矩阵(焦距等相机参数)。包括焦距f,相机中心cx,cy,还有两个畸变系数。
./CameraCalibrator
标定完成后,输出得到一个camera.cfg文件,然后就可以接着执行 ./PTAM
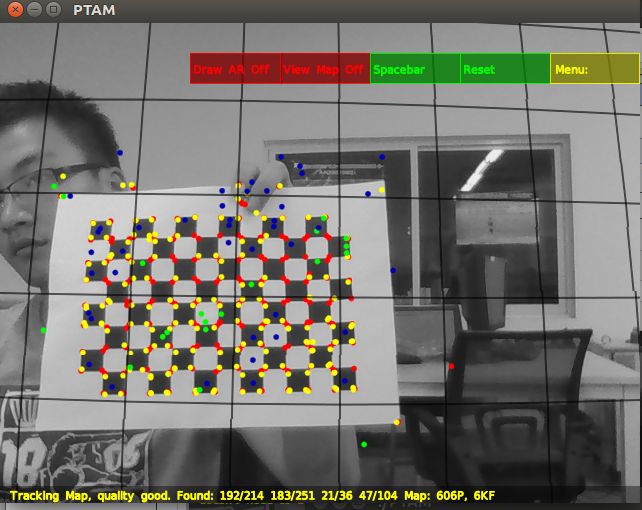
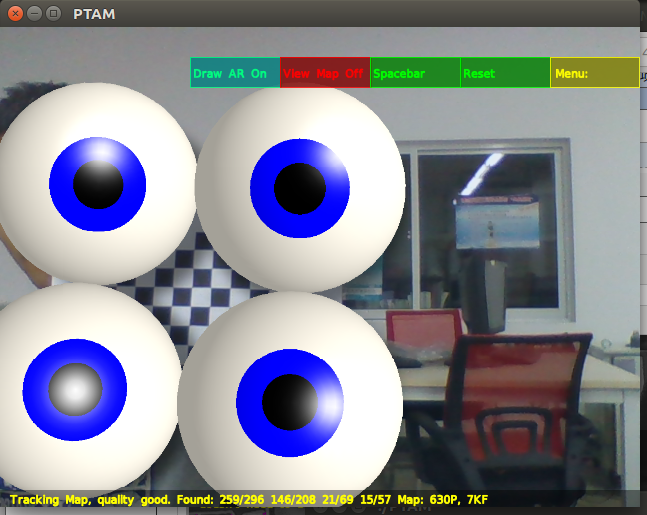
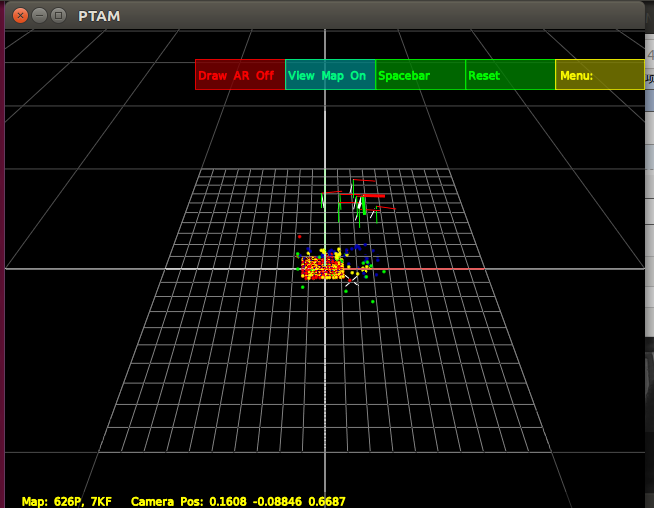
CameraCalibrator运行完毕之后运行PTAM,开始运行时由于需要初始化地图,需要用户选取两帧作为初始化的数据输入,具体操作步骤为按下空格键,程序会计算出这一帧的FAST角点显示在图像上,然后做轻微平移,再次按下空格键,初始化完毕。界面右上方有Draw AR off和View Map on,作用分别是把虚拟物品(此处为四只眼睛)显示到平面上和显示软件所建地图信息。以下是运行截图
更改调用外接摄像头
当然笔记本默认打开的是你的笔记本自带摄像头 /dev/video0
我在电脑上加了一个usb外接摄像头,罗技c270, 地址为/dev/video1
要想打开外接摄像头需要对VideoSource_Linux_V4L.cc文件中的内容进行更改,
string QuickCamFile = GV3::get<string>("VideoSource.V4LDevice", "/dev/video0"); 更改为 string QuickCamFile = GV3::get<string>("VideoSource.V4LDevice", "/dev/video1");
这样,当调用程序时打开的就是你的usb外接摄像头。
参考教程:
https://blog.csdn.net/shhu1993/article/details/47783077
https://blog.csdn.net/jinghouxiang/article/details/46998235
http://blog.sina.com.cn/s/blog_7b83134b0102wabk.html
ptam的增强版ptamm下载地址
http://www.robots.ox.ac.uk/~bob/software/ptamm_download.html
ptamm需要多加一个库lib3ds
下载地址:http://www.lib3ds.org
lib3ds的版本为 :lib3ds-20080909.zip.
但是编译报错
明天继续解决

