opencv中Mat格式的数据访问.at
opencv3中图形存储基本为Mat格式,如果我们想获取像素点的灰度值或者RGB值,可以通过image.at<uchar>(i,j)的方式轻松获取。
Mat类中的at方法对于获取图像矩阵某点的RGB值或者改变某点的值很方便,对于单通道的图像,则可以使用:
image.at<uchar>(i, j)
其中有一个要注意的地方是i对应的是点的y坐标,j对应的是点的x坐标,而不是我们习惯的(x,y)
来获取或改变该点的值,而RGB通道的则可以使用:
image.at<Vec3b>(i, j)[0] image.at<Vec3b>(i, j)[1] image.at<Vec3b>(i, j)[2]
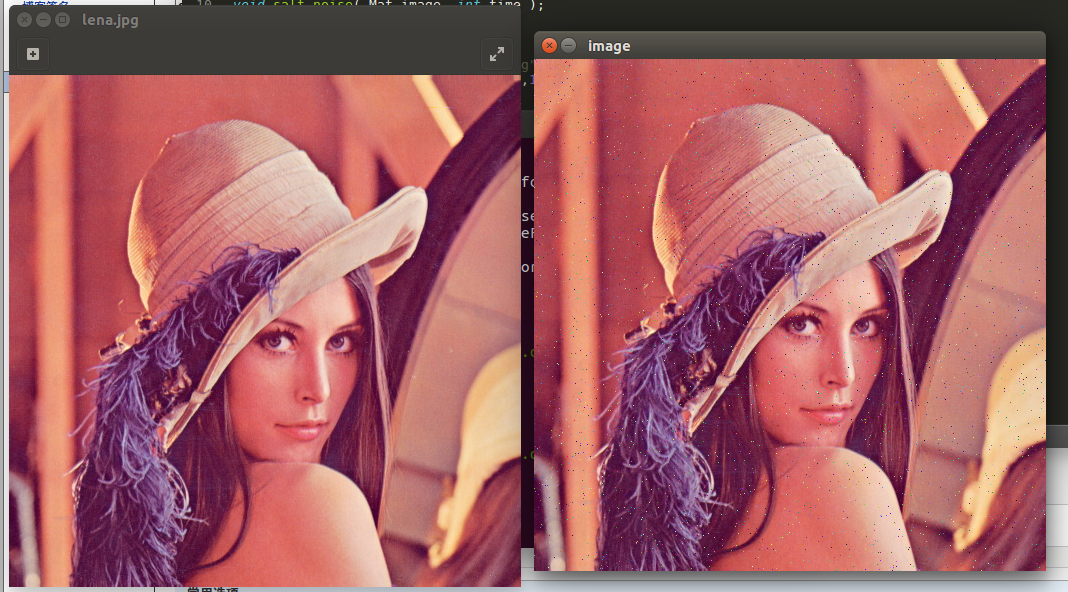
来分别获取B、G、R三个通道的对应的值。下边的代码实现对图像加椒盐噪声:
// created by ning zhang 2018/4/25
// The function of this program is to add noise to the image
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace std;
using namespace cv;
void salt_noise( Mat image, int time );
int main ( int argc, char** argv )
{
Mat image = imread("../lena.jpg",0); //input the gray image
if ( image.empty() )
{
cout << "Load image error" << endl;
return -1;
}
salt_noise(image, 3000);
namedWindow("image", 1);
imshow("image", image);
waitKey();
return 0;
}
void salt_noise ( Mat image, int time )
{
for (int k = 0; k < time; k++ ) //time is the number of noise you add
{
int i = rand() % image.rows;
int j = rand() % image.cols;
if (image.channels() == 1) //single channel
{
image.at<uchar>(i,j) = rand() % 255;
}
else if (image.channels() == 3) //RGB channel
{
image.at<Vec3b>(i, j)[0] = rand() % 255;
image.at<Vec3b>(i, j)[1] = rand() % 255;
image.at<Vec3b>(i, j)[2] = rand() % 255;
}
}
}
效果图如下所示,可以为图片增加噪点
代码地址:https://github.com/feifanrensheng/salt_noise
还有比较省时的方法使用Mat的模板子类Mat_<T>,,对于单通道的具体使用:
Mat_<uchar> img = image; img(i, j) = rand() % 255;
对于RGB通道的使用:
Mat_<Vec3b> img = image; img(i, j)[0] = rand() % 255; img(i, j)[1] = rand() % 255; mg(i, j)[2] = rand() % 255;
还可以用指针的方法遍历每一像素:(耗时较小)
void colorReduce(Mat image, int div = 64) { int nrow = image.rows; int ncol = image.cols*image.channels(); for (int i = 0; i < nrow; i++) { uchar* data = image.ptr<uchar>(i);//get the address of row i; for (int j = 0; j < ncol; j++) { data[i] = (data[i] / div)*div ; } } }
我们要尤其注意OpenCV坐标系与row&col的关系 (Mat::at(x,y)和Mat::at(Point(x, y))的区别)
直接给出对应关系吧
row == heigh == Point.y col == width == Point.x Mat::at(Point(x, y)) == Mat::at(y,x)
因为还有点的坐标,所以建议在访问时都用Mat::at(Point(x, y))这种形式吧,免去了点坐标和行列的转换
详细说明:
-
坐标体系中的零点坐标为图片的左上角,X轴为图像矩形的上面那条水平线;Y轴为图像矩形左边的那条垂直线。该坐标体系在诸如结构体Mat,Rect,Point中都是适用的。(虽然网上有学着说OpenCV中有些数据结构的坐标原点是在图片的左下角,但是我暂时还没碰到过)。
-
在使用image.at(x1, x2)来访问图像中点的值的时候,x1并不是图片中对应点的x轴坐标,而是图片中对应点的y坐标。因此其访问的结果其实是访问image图像中的Point(x2, x1)点,即与image.at(Point(x2, x1))效果相同。
-
如果所画图像是多通道的,比如说image图像的通道数时n,则使用Mat::at(x, y)时,其x的范围依旧是0到image的height,而y的取值范围则是0到image的width乘以n,因为这个时候是有n个通道,所以每个像素需要占有n列。但是如果在同样的情况下,使用Mat::at(point)来访问的话,则这时候可以不用考虑通道的个数,因为你要赋值给获取Mat::at(point)的值时,都不是一个数字,而是一个对应的n维向量。
参考:https://blog.csdn.net/xiao_lxl/article/details/69568963
https://blog.csdn.net/wangxuwen2/article/details/52443978
https://blog.csdn.net/u013203733/article/details/73742247
https://www.baidu.com/s?ie=utf-8&f=8&rsv_bp=0&rsv_idx=1&tn=baidu&wd=mat.at()&rsv_pq=ca3aed07000036c0&rsv_t=24317bhASyuKaxOgeSdlua%2FIqMWm7sRcP%2F1SQu5FhmelisfC2AWVqZaIMPk&rqlang=cn&rsv_enter=1&rsv_sug3=10&rsv_sug1=8&rsv_sug7=100&rsv_sug2=0&inputT=6442&rsv_sug4=7626

 浙公网安备 33010602011771号
浙公网安备 33010602011771号