

okvis代码解读
1. IMU消费者线程:
在imuConsumerLoop()中主要处理imu的propagation
每次imuMeasurementsReceived_队列中出现IMU数据,就会propagate一次,如果刚完成BA优化(需要repropagationNeeded_),则将优化后的状态值作为propagation的初值,否则在上一状态基础上完成状态propagation。
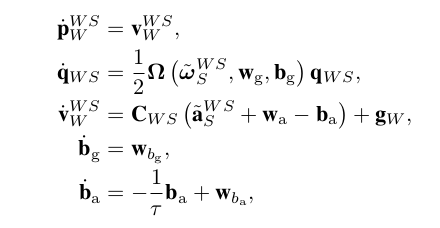
主要对应ImuError::propagation()函数,该函数大概两百行,主要实现OKVIS论文中的 4.2 IMU Kinematics and bias model。
if (end < nexttime) { double interval = (nexttime - it->timeStamp).toSec(); nexttime = t_end; dt = (nexttime - time).toSec(); const double r = dt / interval; omega_S_1 = ((1.0 - r) * omega_S_0 + r * omega_S_1).eval(); //cha zhi acc_S_1 = ((1.0 - r) * acc_S_0 + r * acc_S_1).eval(); } if (dt <= 0.0) { continue; } Delta_t += dt; if (!hasStarted) { hasStarted = true; const double r = dt / (nexttime - it->timeStamp).toSec(); omega_S_0 = (r * omega_S_0 + (1.0 - r) * omega_S_1).eval(); //kaishijieduanzuochazhi acc_S_0 = (r * acc_S_0 + (1.0 - r) * acc_S_1).eval(); }
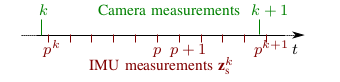
这两段代码把time 和 end与imu的时间戳做插值对齐,因为两个相机帧跟imu帧可能存在时间戳不一致
imu运动学模型
旋转的传播
首先对相邻的两个角速度取中值并去除偏差
const Eigen::Vector3d omega_S_true = (0.5*(omega_S_0+omega_S_1) - speedAndBiases.segment<3>(3));
旋转角度等于角速度乘以时间,根据四元数的计算公式,我们取计算旋转角度的一半
const double theta_half = omega_S_true.norm() * 0.5 * dt;
然后按照旋转角和四元数的转换关系计算四元数q

Eigen::Quaterniond dq; const Eigen::Vector3d omega_S_true = (0.5*(omega_S_0+omega_S_1) - speedAndBiases.segment<3>(3)); const double theta_half = omega_S_true.norm() * 0.5 * dt; const double sinc_theta_half = ode::sinc(theta_half); const double cos_theta_half = cos(theta_half); dq.vec() = sinc_theta_half * omega_S_true * 0.5 * dt; dq.w() = cos_theta_half; Eigen::Quaterniond Delta_q_1 = Delta_q * dq;
对旋转矩阵和加速度进行积分
const Eigen::Matrix3d C = Delta_q.toRotationMatrix(); const Eigen::Matrix3d C_1 = Delta_q_1.toRotationMatrix(); const Eigen::Vector3d acc_S_true = (0.5*(acc_S_0+acc_S_1) - speedAndBiases.segment<3>(6)); const Eigen::Matrix3d C_integral_1 = C_integral + 0.5*(C + C_1)*dt; const Eigen::Vector3d acc_integral_1 = acc_integral + 0.5*(C + C_1)*acc_S_true*dt;
对旋转矩阵和加速度进行二重积分
C_doubleintegral += C_integral*dt + 0.25*(C + C_1)*dt*dt; acc_doubleintegral += acc_integral*dt + 0.25*(C + C_1)*acc_S_true*dt*dt;
计算雅可比矩阵
协方差传播
2. Frame消费者线程
// Loop to process frames from camera with index cameraIndex void ThreadedKFVio::frameConsumerLoop(size_t cameraIndex) {
2.1 判断该帧是否关键帧(第一帧是关键帧)
2.2 利用IMU预测pose,为特征点匹配提供方向参考
在frameConsumerLoop()中Image和IMU的同步策略是这样的:
若没有IMU数据,则不处理;IMU第一帧数据之前的那一帧Image也抛弃,下一帧Image(第一帧Frame)才进行特征检测处理。同时第一帧之前的IMU数据会用来计算pose(该函数返回值永远是true,因此initPose是否准确完全依赖IMU给出的读数):
bool success = okvis::Estimator::initPoseFromImu(imuData, T_WS);
第一帧之后的IMU数据进行propagation(注意multiframe在单目情形下就是frame),注意到这里propagation的covariance和jacobian均为0,仅仅用于预测,对特征点检测提供先验的T_WC:
okvis::ceres::ImuError::propagation(imuData, parameters_.imu, T_WS, speedAndBiases, lastTimestamp, multiFrame->timestamp());
2.3 Harris角点检测+BRISK描述子计算
接下来对frame特征检测(Harris)和描述子(BRISK)计算(这里的T_WC由前一步的propagation提供,主要为了获取重力方向,提高描述子匹配鲁棒性):
