泡泡一分钟:
https://pan.baidu.com/s/1RMqhEoz7JuyCWwthp9qXMw
Human-in-the-loop Augmented Mapping
人在环地图增强
Abbas Sidaoui, Imad H. Elhajj, Daniel Asmar
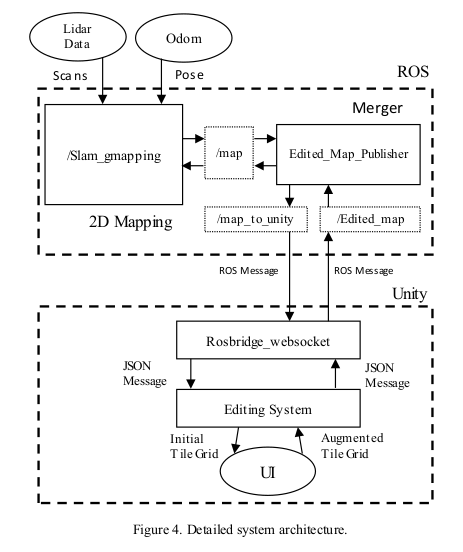
Abstract— In this paper we develop a real-time human augmented mapping system. This approach replaces the traditional offline post processing of maps by a user-friendly system allowing for online editing capabilities. A wide number of applications that acquire accurate mapping of the environment could benefit from such a solution. The proposed framework consists of two main parts: 2D map building using LIDAR, encoders, and IMU; and a user interface for human map augmentation. The first part is built over Gmapping ROS package, while the second is developed in Unity software. Real-world experiments validated the ability of our system to correct for sensor noise and various mapping errors, thus increasing the accuracy of the obtained maps without additional computational costs.
在本文中,我们开发了一个实时人为增强建图系统。这种方法通过一个允许在线编辑功能的用户友好的系统取代了传统的地图离线后处理。获得准确的环境建图的大量应用程序可以从这种解决方案中受益。提出的框架包括两个主要部分:使用LIDAR、编码器和IMU的二维地图构建; 以及用于人为地图增强的用户界面。第一部分是在Gmapping ROS包上构建的,而第二部分是在Unity软件中开发的。真实世界的实验验证了我们的系统校正传感器噪声和各种建图误差的能力,从而提高了所获得的地图的准确性,而无需额外的计算成本。
I. INTRODUCTION
准确的建图是自主移动机器人的基本需求,因为它在导航,路径规划,探索等方面起着至关重要的作用。在过去的几十年中,随着自动移动机器人被广泛地集成到不同的领域,在地图绘制技术方面取得了重大进展。除了在自主导航中的重要作用外,精确的地图构造对施工管理任务具有很大的影响,它可以取代传统的计算机辅助设计(CAD)和人类执行的激光卷尺之间的比较方法。后一种方法是耗时的,并且受制于人类可能总是假设空间是垂直直线的集合这一事实,但情况并非总是如此[1]。在同时定位和建图(SLAM)[2,3,4]中,自治代理生成环境地图,同时在地图内定位自身。SLAM地图可以使用2D传感器(如LIDAR和激光测距扫描仪)在二维空间中构建,也可以使用3D扫描仪,RGB-D传感器等在3D空间中构建[25]。
在本文中,我们提出了一个系统,通过在循环中包含一个人来实时编辑地图。所提出的框架通过用户界面将占用网格图发送给人,然后将人的编辑增强到原始地图上。我们提出的系统是使用ROS和Unity软件实现的。该系统能够校正不完整的障碍物边界,删除测量噪声和不需要的物体(例如,椅子),增强低于/高于LIDAR检测平面的障碍物,并纠正位姿发生跳跃的错误。我们的系统还可以纠正墙壁中的任何偏斜,并添加激光雷达可能看不到的障碍物,例如玻璃墙。据信,将该系统集成到现有的建图算法中可以提高建图的准确性,并允许使用可能不是非常准确的低成本传感器; 这种好处只需要很少的额外计算成本。
V. CONCLUSION
在本文中,我们提出了一个实时地通过人为增强地图的框架。 我们提出的系统允许在线地图编辑功能,而不是传统的离线地图编辑。我们使用ROS软件包和Unity软件开发了我们的系统。 用户界面允许从原始地图添加或移除障碍物边界并将其发送回机器人。我们在实际实验中评估了我们提出的系统。该系统在校正传感器噪声和不同类型错误的地图方面显示出实用性和效率。未来的工作将考虑自动化地图发送/接收过程和校正机器人位姿。此外,为了更轻松的用户界面和更准确的地图编辑,我们将利用增强现实技术。