图像滤波
噪声:
MATLAB中函数imnoise 是表示添加噪声污染一幅图像,叫做噪声污染图像函数。
g = imnoise(I,type)
g = imnoise(I,type,parameters)
g = imnoise(I,‘gaussian’,m,v)
g = imnoise(I,‘localvar’,V)
g = imnoise(I,‘localvar’,image_intensity,var)
g = imnoise(I,‘poisson’)
g = imnoise(I,‘salt & pepper’,d)
g = imnoise(I,‘speckle’,v)
f为是输入图像。函数imnoise在给图像添加噪声之前,将它转换为范围[0,1]内的double类图像。指定噪声参数时必须考虑到这一点。
g=imnoise(f,‘gaussian’,m,var)将均值m,方差为var的高斯噪声加到图像f上,默认值是均值m为0,方差var为0.01的噪声。
g=imnoise(f,‘localvar’,V)将均值为0,局部方差为V的高斯噪声添加到图像f上,其中V是与f大小相同的一个数组,它包含了每一个点的理想方差值。
g=imnoise(f,‘localvar’,image_intensity,var)将均值为0的高斯噪声添加到图像f中,其中噪声的局部方差var是图像f的亮度值的函数。参量image_intensity和var是大小相同的向量,plot(image_intensity,var)绘制出噪声方差和图像亮度的函数关系。向量image_intensity必须包含范围在[0,1]内的归一化亮度值。
g=imnoise(f,‘salt & pepper’,d)用椒盐噪声污染图像f,其中d是噪声密度(即包括噪声值的图像区域的百分比)。因此,大约有d*numel(f)个像素受到影响。默认的噪声密度为0.05。
g=imnoise(f,‘speckle’,var)用方程g=f+n*f)将乘性噪声添加到图像f上,其中n是均值为0,方差为var的均匀分布的随机噪声,var的默认值是0.04。
g=imnoise(f,‘poisson’)从数据中生成泊松噪声,而不是将人工的噪声添加到数据中,为了遵守泊松统计,unit8和unit16类图像的亮度必须和光子的数量相符合。当每个像素的光子数量大于65535时,就要使用双精度图像。亮度值在0到1之间变化,并且对应于光子的数量除以10e12。
滤波方法:均值滤波
函数名称:imfilter
函数语法:g=imfilter(f,w,filtering_mode,boundary_options,size_optinos)
函数功能:对任意类型数组或多维图像进行滤波
参数介绍:f是输入图像,w为滤波模板,g为滤波结果;表1-1总结了其他参数的含义。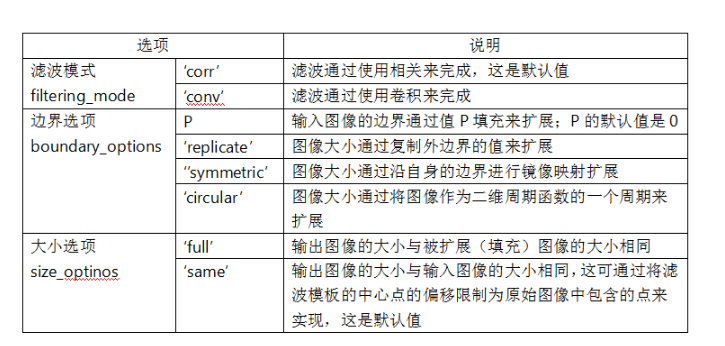
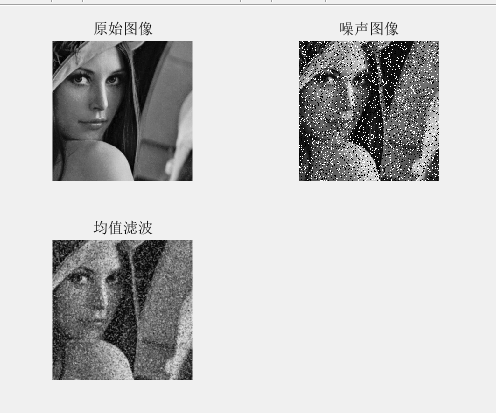
f = imread('02.tif');
subplot(2,2,1), imshow(f), title('原始图像');
g = imnoise(f,'salt & pepper',0.2);
subplot(2,2,2), imshow(g), title('噪声图像');
w = [1/9 1/9 1/9; 1/9 1/9 1/9; 1/9 1/9 1/9]
g2 = imfilter(g,w, 'replicate')
subplot(2,2,3), imshow(g2), title('均值滤波');