[Paper Reading] Tesla AI Day 2022 for FSD Beta
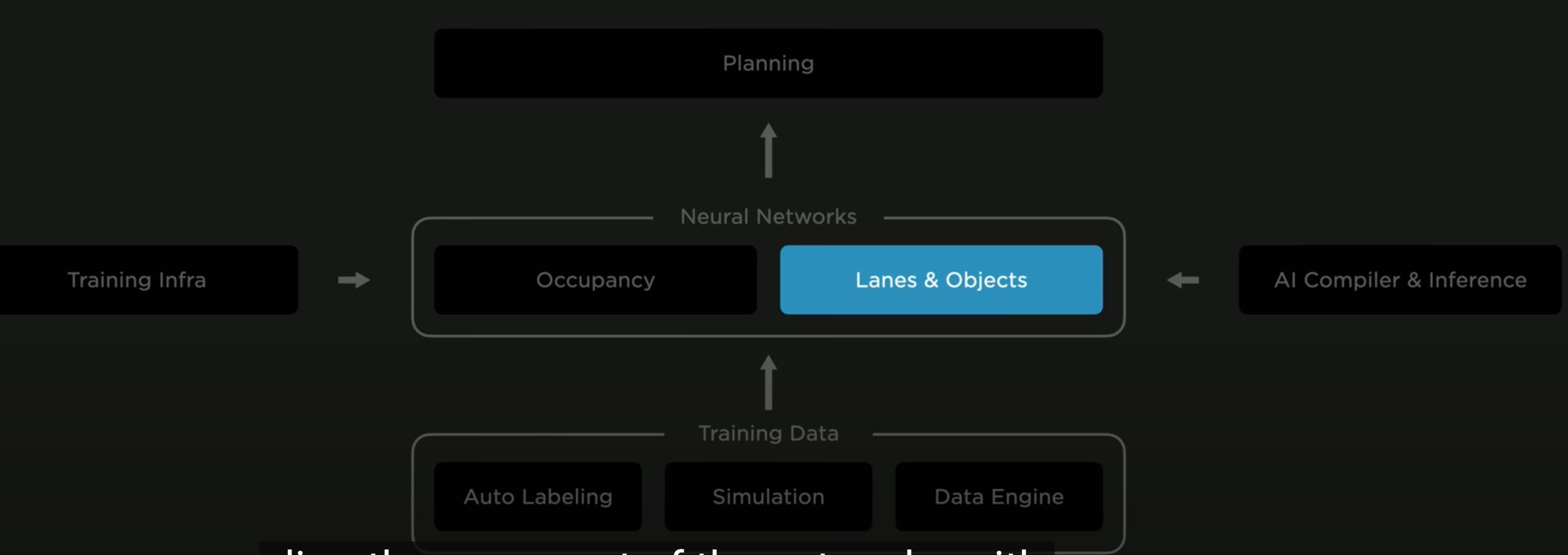
Framework
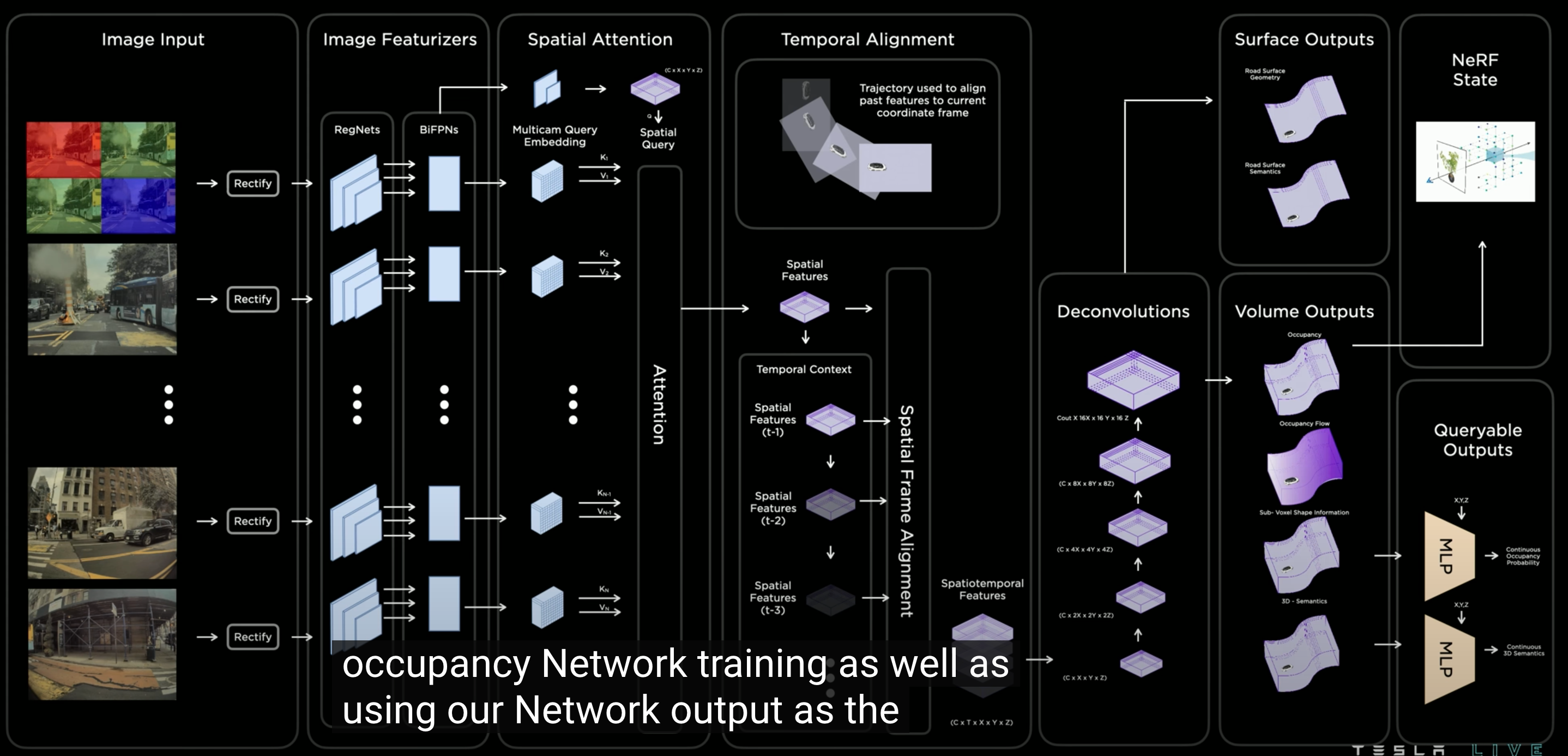
Occupancy
模型结构比较像ICCV 2023的OccNet的做法,不过还会额外预测Suface以及NeRF state,预测可行驶区别suface的好处是可以辅助Planning&Control给出更加准确的运动速度等信息(比如,上下坡可根据suface坡度做更准确判断)。
Lanes Neural Network
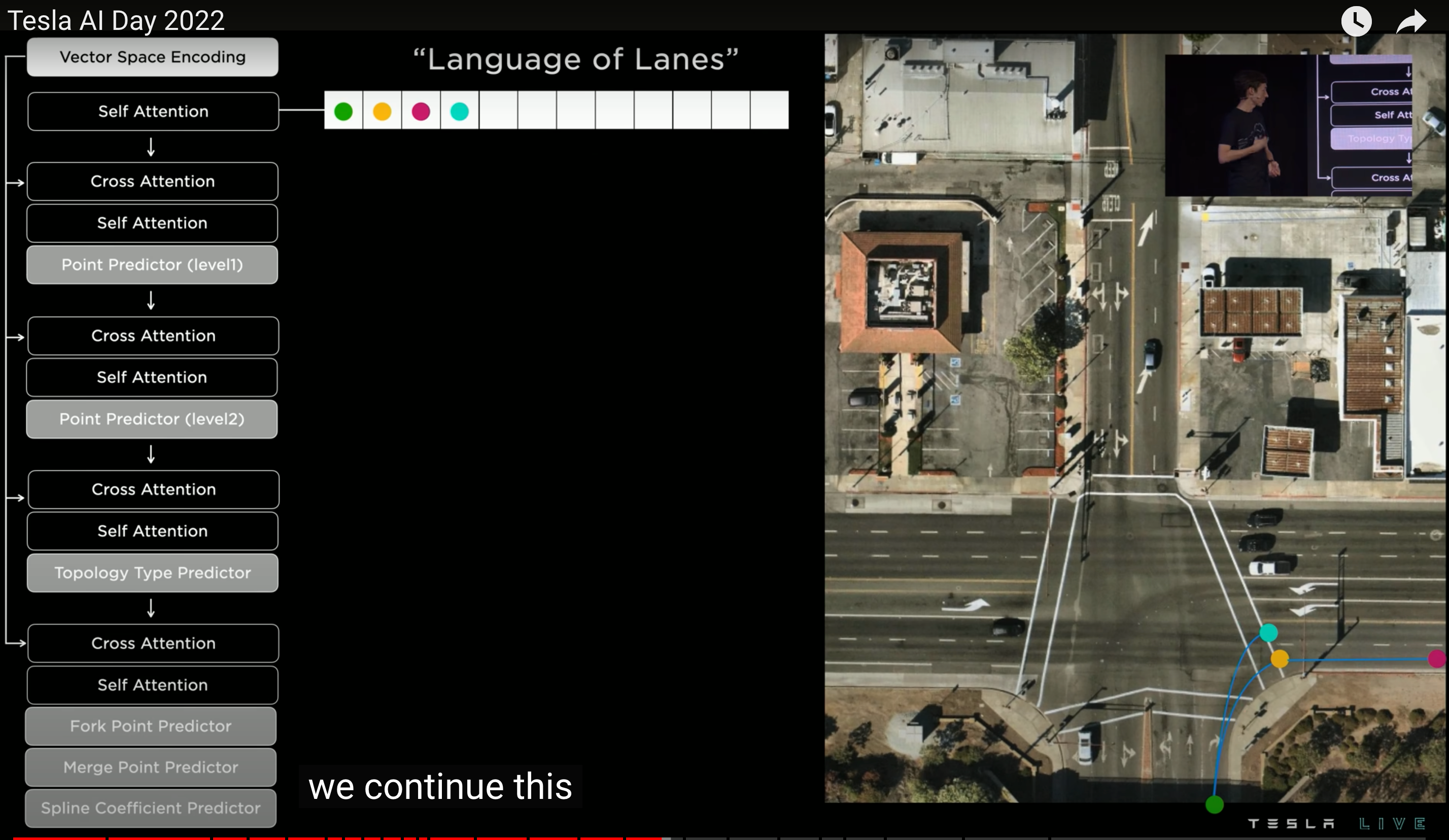
比较有意思的是将车道线的节点(eg. 起点、中间点、分叉点)的位置信息作为token,使用Transformer的Decoder预测节点token以及链接关系矩阵。
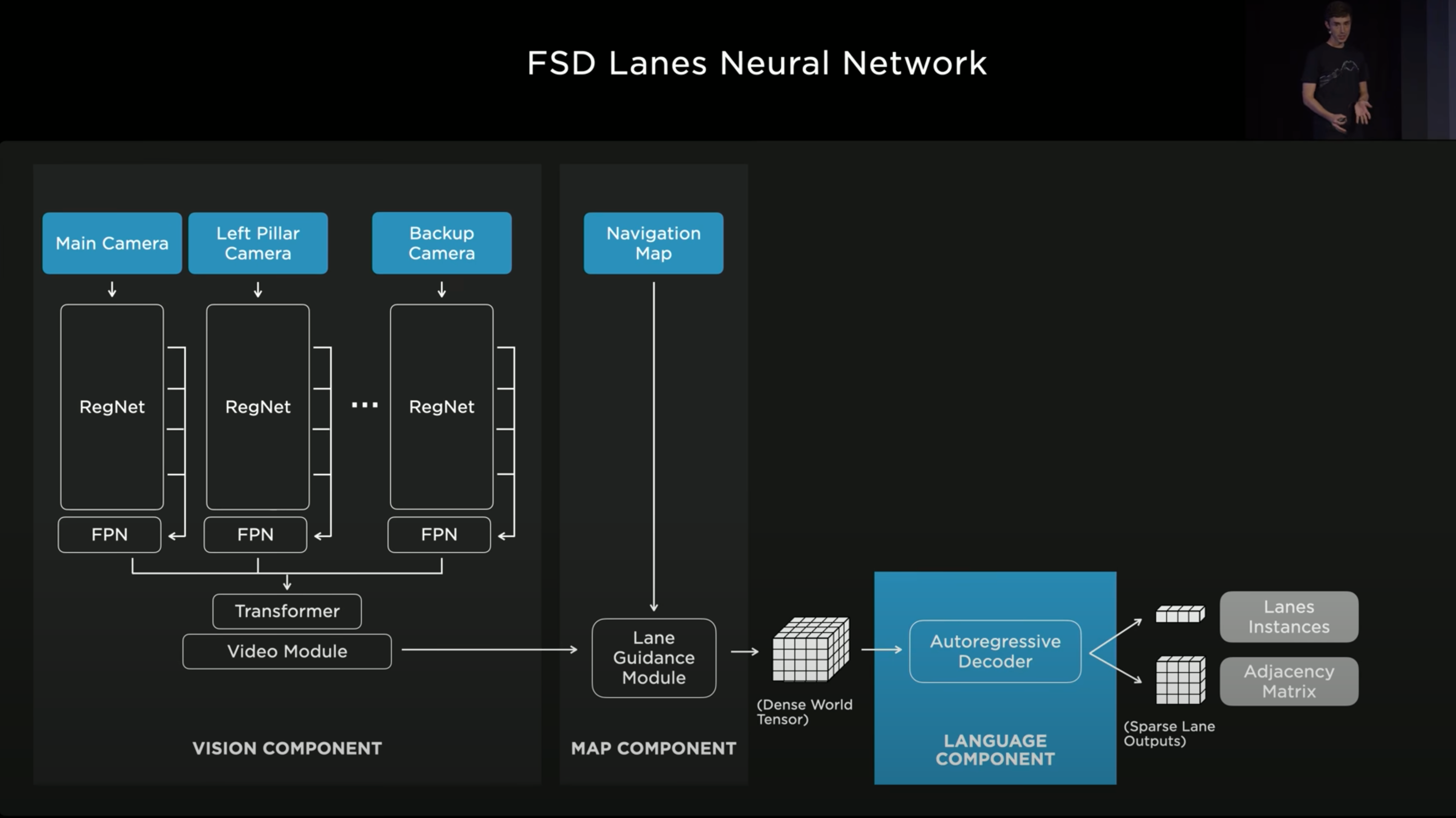
Language Decoder
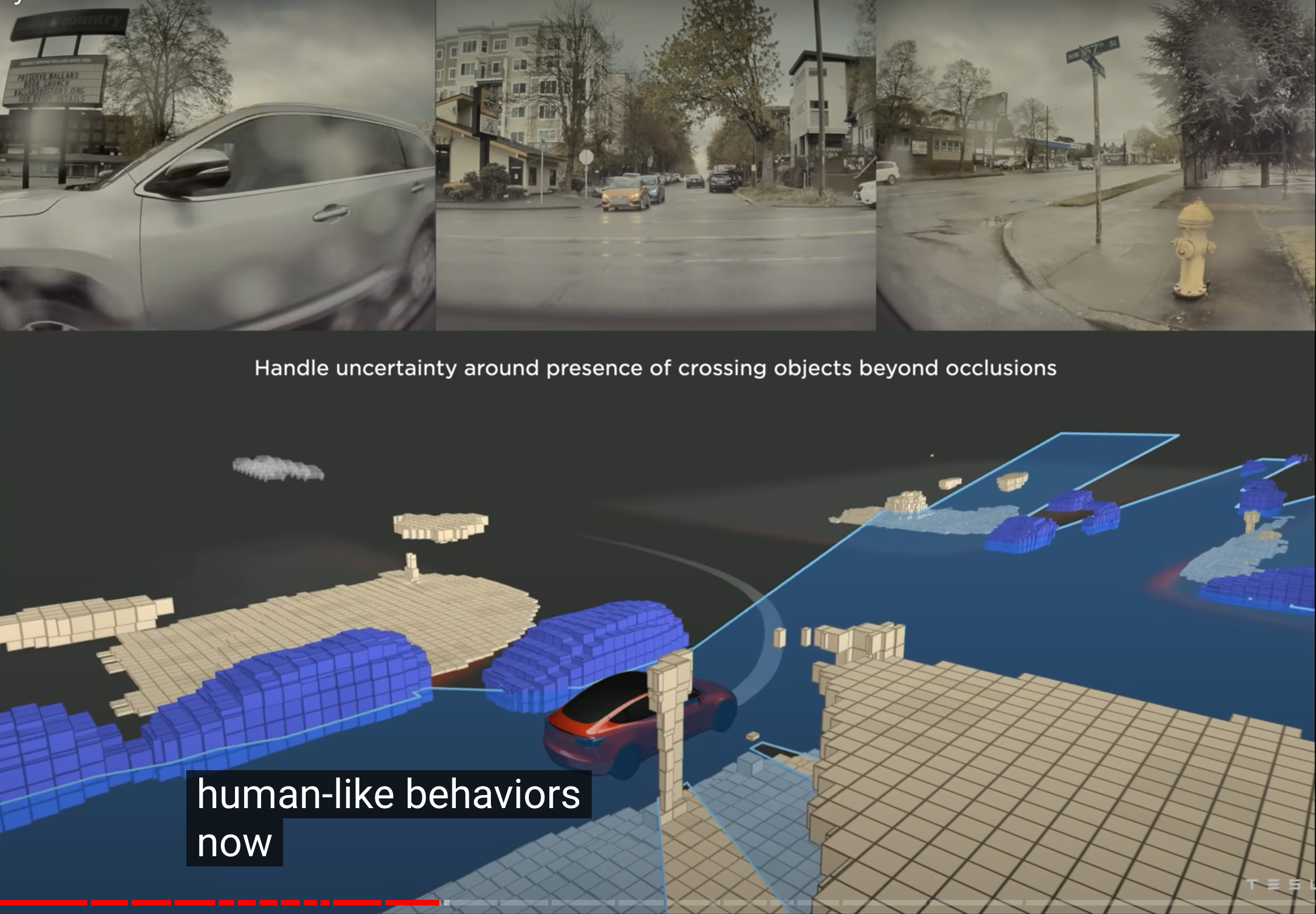
Planning
不同agent(动态目标)会有K种可能运动轨迹,这些可能运动轨迹组合起来会形成大量潜在可能性,每种可能性的概率判别速度就非常重要,FSD Beta展示的基于NN的planner大大提升了每次判断的速度。

下图是Occupancy可视化,Occupancy会做为3D概率图来辅助轨迹预测。
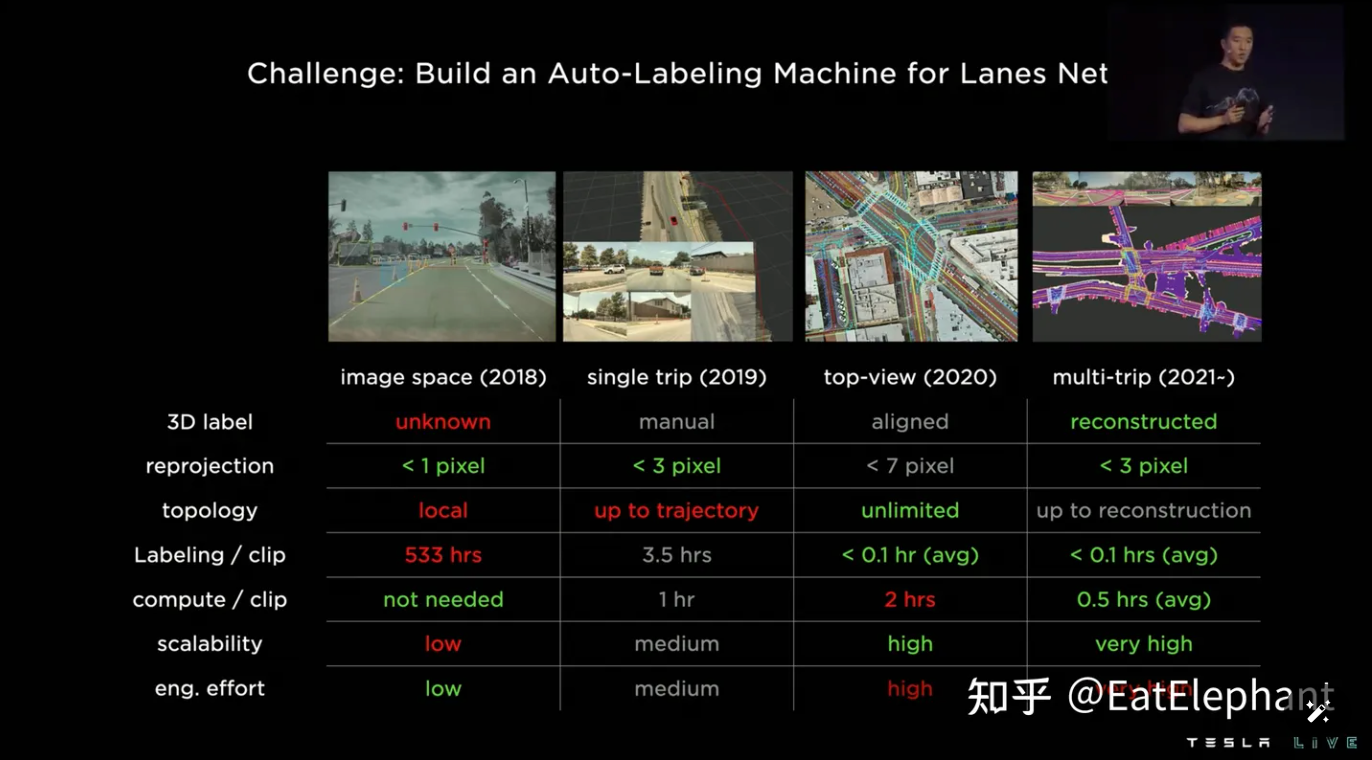
Auto Labeling
2019年SfM重建点云上标注
2020年BEV上标注
2021年多趟3D轨迹拼接重建点云上标注
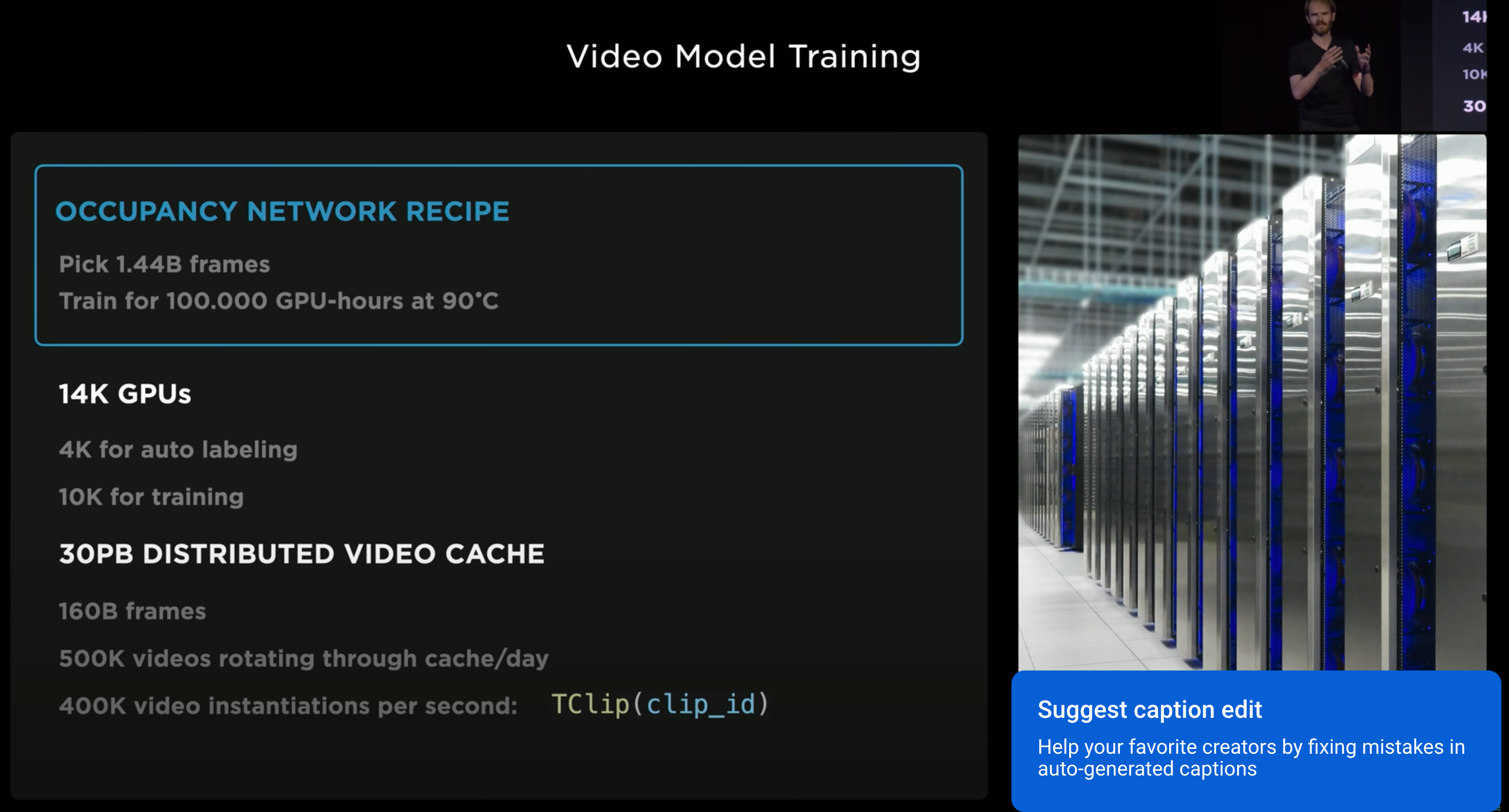
Training Infra
14k gpus
160亿帧的训练数据
相关链接
https://www.youtube.com/watch?v=ODSJsviD_SU
https://zhuanlan.zhihu.com/p/570431956?utm_source=weibo&utm_medium=social&utm_oi=34558732926976&utm_content=snapshot&utm_id=0
本文来自博客园,作者:fariver,转载请注明原文链接:https://www.cnblogs.com/fariver/p/18242550

 浙公网安备 33010602011771号
浙公网安备 33010602011771号