
控制器 制作 单一的推箱子游戏(马推箱子)
马推箱子(有些复杂化了(当时没有想那么多,尽量不要出bug))
思路:
1.二维数组(三个左边(终点,箱子,马)),随机坐标,不相同。
2.只需要做出一个方向的全部操作,另外三个都一样。
3.确定情况四种(W)代码都是重复的只是改了下标:
一)整个Y轴
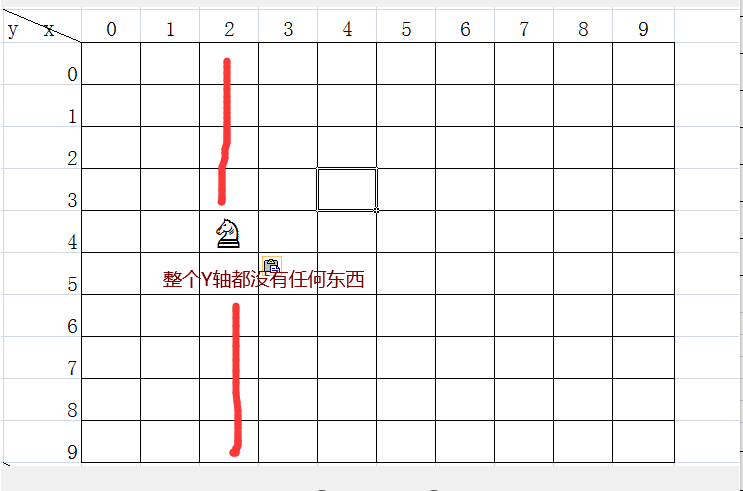
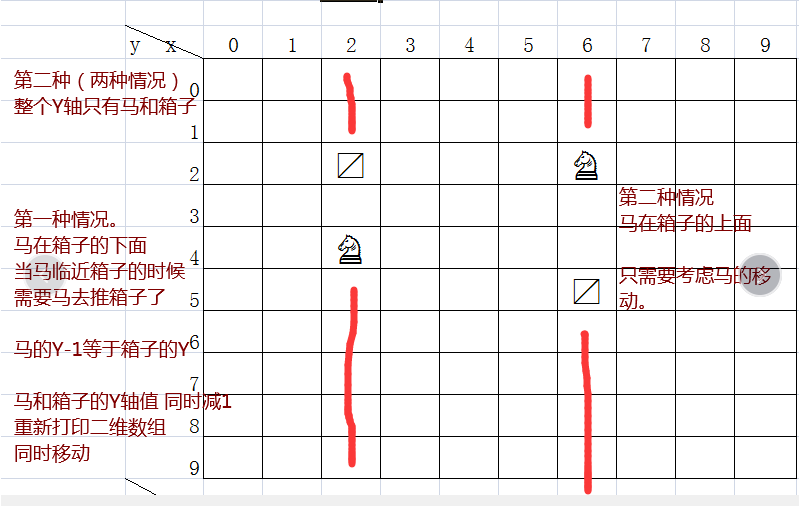
二)整个Y轴只有马和箱子
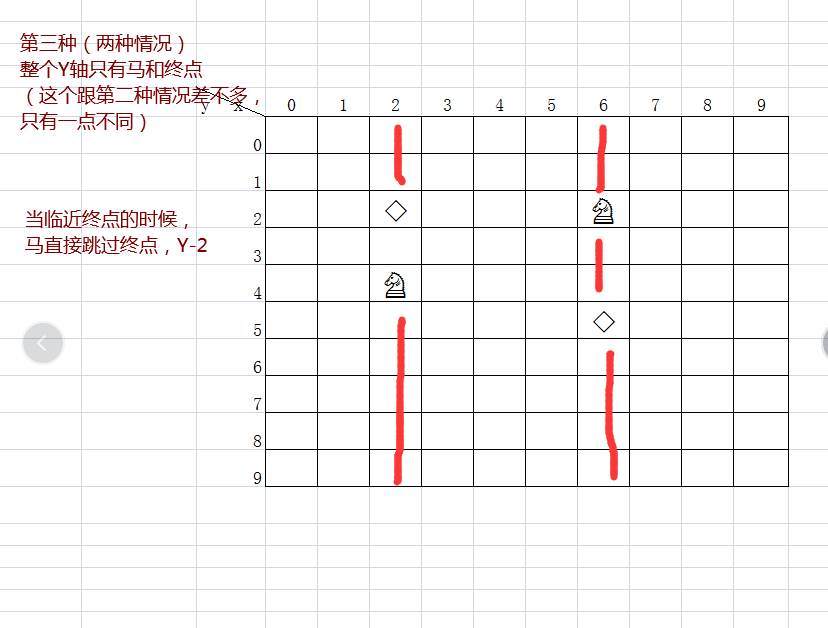
三)整个Y轴只有马和终点
四)整Y轴,有马,箱子,终点
1)马在最上面,另外两个随便位置

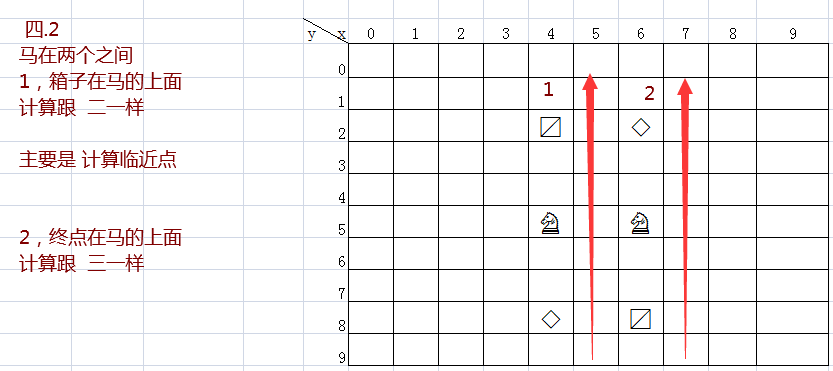
2)马在两个之间(两种情况)
3)马在最下面(最复杂的)
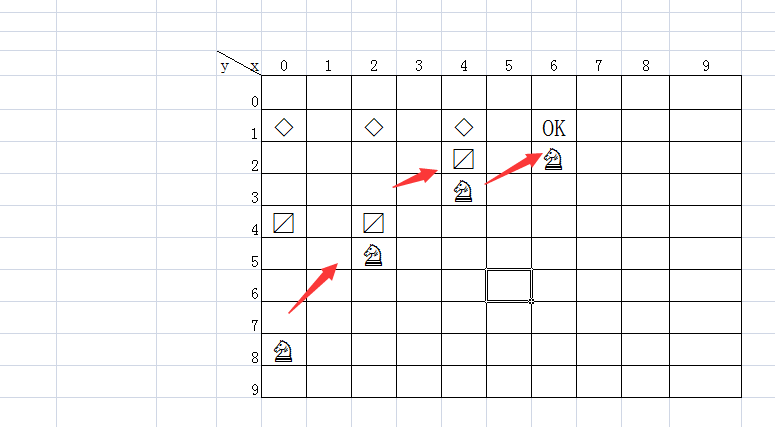
3.1)箱子在最上面,终点在中间
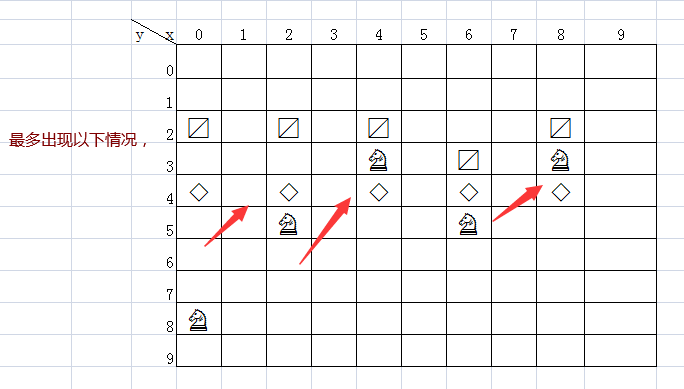
3.2)终点在最上面,箱子在中间(成功)
package com.xmx.lzy5_array;
import java.util.Arrays;
import java.util.Random;
import java.util.Scanner;
public class SokobanTwoDimensionalArrayDemo4 {
public static void main(String[] args) {
Scanner input=new Scanner(System.in);
Random rd=new Random();
//1.确定地图样式
String[][] map=new String[10][10];
for (String[] strings : map) {
Arrays.fill(strings, "口");
}
//2.确定马的坐标 这里的10个数 0:第1个数 从0开始一共10个数所以是0~9
int h_x= rd.nextInt(10),h_y=rd.nextInt(10);
map[h_y][h_x]="♘";
//3.确定箱子的坐标 判断是否跟马重叠 这里0~8 箱子不挨边 挨边会出现问题
int b_x= rd.nextInt(8)+1,b_y=rd.nextInt(8)+1;
//判断
while (h_x==b_x&&h_y==b_y){
b_x= rd.nextInt(8)+1;
b_y=rd.nextInt(8)+1;
}
map[b_y][b_x]="〼";
//4.确定终点的坐标 判断是否跟马和箱子重叠
int t_x=rd.nextInt(10),t_y=rd.nextInt(10);
//判断
while ((t_x==b_x&&t_y==b_y)||(h_x==t_x&&h_y==t_y)){
t_x= rd.nextInt(8)+1;
t_y=rd.nextInt(8)+1;
}
map[t_y][t_x]="◇";
//测试
// b_x=h_x;
// t_x=h_x;
//检测
int sum=0;
//显示地图
drawMap(map);
//5.移动马(先弄一个死循环)
while (true){
System.out.println("请输入(w-向_上;s-向下;a-向左;d-向右):");
String trend=input.next();
switch (trend){
case "w":
//清空马
map[h_y][h_x]="口";
//改变Y(-)坐标
if (h_y!=0){
//1.马Y轴,只有箱子。
if(h_x==b_x&&b_x!=t_x){
// 1.1).马前面是箱子
if(h_y-1==b_y){
//判断在临界点
if (b_y!=0){
//清空原来的位置
map[b_y][b_x]="口";
//更新位置
h_y-=1;
b_y-=1;
}
}
// 1.2).马前面为空
else {
h_y-=1;
}
}
//2.马Y轴,只有终点。
if(h_x==t_x&&b_x!=t_x){
// 2.1).马前面是终点
if(h_y-1==t_y){
//判断在临界点
if(t_y!=0){
//更新位置
h_y-=2;
}
}
// 2.2).马前面为空
else {
h_y-=1;
}
}
//3.马Y轴,有箱子-终点。
if(h_x==t_x&&h_x==b_x){
//3.1).马在下面
if(h_y>t_y&&h_y>b_y){
//终点在上面--箱子中间
if (b_y>t_y){
//马临界箱子的时候
if(h_y-1==b_y){
//箱子临界终点的时候
if (b_y-1==t_y){
//清空
map[b_y][b_x]="口";
map[t_y][t_x]="口";
//更新位置
h_y-=1;
b_y=t_y;//b_y-=1; 这个时候 b_y=t_y b_x=t_x
//填充位置 在下面 做判断
sum++;
}else {
//清空箱子
map[b_y][b_x]="口";
//更新位置
h_y-=1;
b_y-=1;
}
}else {
h_y-=1;
}
}
//箱子在上面--终点中间
else {
//判断马临界终点的时候
if(h_y-1==t_y){
//当终点前面是箱子
if(t_y-1==b_y){
//判断箱子临界
if(b_y!=0){
//更新位置
h_y-=2;
b_y-=1;
}
}else {
//更新位置
h_y-=2;
}
}else {
h_y-=1;
}
}
}
//3.2).马在上面 不需要判断 前面为全是空
else if (h_y<t_y&&h_y<b_y){
//更新位置
h_y-=1;
}
//3.3).马在中间
else {
//箱子在上面--终点下面(这个不需要管)
if(b_y<t_y){
//临界
if(h_y-1==b_y){
//临界
if (b_y!=0){
//更新位置
h_y-=1;
b_y-=1;
}
}else {
//更新位置
h_y-=1;
}
}
//终点在上面--箱子下面(这个不需要管)
else {
//临界
if(h_y-1==t_y){
//临界
if (t_y!=0){
//更新位置
h_y-=2;
}
}else {
//更新位置
h_y-=1;
}
}
}
}
//4.马Y轴前面什么都没有
if(h_x!=b_x&&h_x!=t_x) {
h_y-=1;
}
}
map[h_y][h_x]="♘";
//判断 输出OK的时候 sum=1,map[t_y][t_x]="ok";
if(sum==1){
map[t_y][t_x]="ok";
}else {
map[b_y][b_x]="〼";
}
break;
case "s":
//清空马
map[h_y][h_x]="口";
//改变Y(+)坐标
if (h_y!=9){
//1.马Y轴,只有箱子。
if(h_x==b_x&&b_x!=t_x){
// 1.1).马后面是箱子
if(h_y+1==b_y){
//判断在临界点
if (b_y!=9){
//清空原来的位置
map[b_y][b_x]="口";
//更新位置
h_y+=1;
b_y+=1;
}
}
// 1.2).马后面为空
else {
h_y+=1;
}
}
//2.马Y轴,只有终点。
if(h_x==t_x&&b_x!=t_x){
// 2.1).马后面是终点
if(h_y+1==t_y){
//判断在临界点
if(t_y!=9){
//更新位置
h_y+=2;
}
}
// 2.2).马前面为空
else {
h_y+=1;
}
}
//3.马Y轴,有箱子-终点。
if(h_x==t_x&&h_x==b_x){
//3.1).马在下面 不需要判断 后面为全是空
if(h_y>t_y&&h_y>b_y){
//更新位置
h_y+=1;
}
//3.2).马在上面
else if (h_y<t_y&&h_y<b_y){
//终点在下面--箱子中间
if (b_y<t_y){
//马临界箱子的时候
if(h_y+1==b_y){
//箱子临界终点的时候
if (b_y+1==t_y){
//清空
map[b_y][b_x]="口";
map[t_y][t_x]="口";
//更新位置
h_y+=1;
b_y=t_y;//b_y-=1; 这个时候 b_y=t_y b_x=t_x
//填充位置 在下面 做判断
sum++;
}else {
//清空箱子
map[b_y][b_x]="口";
//更新位置
h_y+=1;
b_y+=1;
}
}else {
h_y+=1;
}
}
//箱子在下面--终点中间
else {
//判断马临界终点的时候
if(h_y+1==t_y){
//当终点前面是箱子
if(t_y+1==b_y){
//判断箱子临界
if(b_y!=9){
//更新位置
h_y+=2;
b_y+=1;
}
}else {
//更新位置
h_y+=2;
}
}else {
h_y+=1;
}
}
}
//3.3).马在中间
else {
//箱子在下面--终点上面(这个不需要管)
if(b_y>t_y){
//临界
if(h_y+1==b_y){
//临界
if (b_y!=9){
//更新位置
h_y+=1;
b_y+=1;
}
}else {
//更新位置
h_y+=1;
}
}
//终点在上面--箱子下面(这个不需要管)
else {
//临界
if(h_y+1==t_y){
//临界
if (t_y!=9){
//更新位置
h_y+=2;
}
}else {
//更新位置
h_y+=1;
}
}
}
}
//4.马Y轴前面什么都没有
if(h_x!=b_x&&h_x!=t_x) {
h_y+=1;
}
}
map[h_y][h_x]="♘";
//判断 输出OK的时候 sum=1,map[t_y][t_x]="ok";
if(sum==1){
map[t_y][t_x]="ok";
}else {
map[b_y][b_x]="〼";
}
break;
case "a":
//清空马
map[h_y][h_x]="口";
//改变X(-)坐标
if (h_x>0){
//1.马X轴,只有箱子。
if(h_y==b_y&&b_y!=t_y){
// 1.1).马前面是箱子
if(h_x-1==b_x){
//判断在临界点
if (b_x!=0){
//清空原来的位置
map[b_y][b_x]="口";
//更新位置
h_x-=1;
b_x-=1;
}
}
// 1.2).马前面为空
else {
h_y-=1;
}
/*
// 1.3).填充新位置
map[h_y][h_x]="♘";
map[b_y][b_x]="〼";*/
}
//2.马X轴,只有终点。
if(h_y==t_y&&b_y!=t_y){
// 2.1).马前面是终点
if(h_x-1==t_x){
//判断在临界点
if(t_x!=0){
//更新位置
h_x-=2;
}
}
// 2.2).马前面为空
else {
h_x-=1;
}
}
//3.马X轴,有箱子-终点。
if(h_y==t_y&&h_y==b_y){
//3.1).马在右边
if(h_x>t_x&&h_x>b_x){
//终点在左边--箱子中间
if (b_x>t_x){
//马临界箱子的时候
if(h_x-1==b_x){
//箱子临界终点的时候
if (b_x-1==t_x){
//清空
map[b_y][b_x]="口";
map[t_y][t_x]="口";
//更新位置
h_x-=1;
b_x=t_x;//b_y-=1; 这个时候 b_y=t_y b_x=t_x
//填充位置 在下面 做判断
sum++;
}else {
//清空箱子
map[b_y][b_x]="口";
//更新位置
h_x-=1;
b_x-=1;
}
}else {
h_x-=1;
}
}
//箱子在左边--终点中间
else {
//判断马临界终点的时候
if(h_x-1==t_x){
//当终点前面是箱子
if(t_x-1==b_x){
//判断箱子临界
if(b_x!=0){
//更新位置
h_x-=2;
b_x-=1;
}
}else {
//更新位置
h_x-=2;
}
}else {
h_x-=1;
}
}
}
//3.2).马在左边 不需要判断 左边为全是空
else if (h_x<t_x&&h_x<b_x){
//更新位置
h_x-=1;
}
//3.3).马在中间
else {
//箱子在左边--终点右边(这个不需要管)
if(b_x<t_x){
//临界
if(h_x-1==b_x){
//临界
if (b_x!=0){
//更新位置
h_x-=1;
b_x-=1;
}
}else {
//更新位置
h_x-=1;
}
}
//终点在左边--箱子右边(这个不需要管)
else {
//临界
if(h_x-1==t_x){
//临界
if (t_x!=0){
//更新位置
h_x-=2;
}
}else {
//更新位置
h_x-=1;
}
}
}
}
//4.马X轴前面什么都没有
if(h_y!=b_y&&h_y!=t_y) {
h_x-=1;
}
}
map[h_y][h_x]="♘";
//判断 输出OK的时候 sum=1,map[t_y][t_x]="ok";
if(sum==1){
map[t_y][t_x]="ok";
}else {
map[b_y][b_x]="〼";
}
break;
case "d":
//清空马
map[h_y][h_x]="口";
//改变X(+)坐标
if (h_x<9){
//1.马Y轴,只有箱子。
if(h_y==b_y&&b_y!=t_y){
// 1.1).马右边是箱子
if(h_x+1==b_x){
//判断在临界点
if (b_x!=9){
//清空原来的位置
map[b_y][b_x]="口";
//更新位置
h_x+=1;
b_x+=1;
}
}
// 1.2).马右边为空
else {
h_x+=1;
}
}
//2.马Y轴,只有终点。
if(h_y==t_y&&b_y!=t_y){
// 2.1).马右边是终点
if(h_x+1==t_x){
//判断在临界点
if(t_x!=9){
//更新位置
h_x+=2;
}
}
// 2.2).马右边为空
else {
h_x+=1;
}
}
//3.马Y轴,有箱子-终点。
if(h_y==t_y&&h_y==b_y){
//3.1).马在右边 不需要判断 后面为全是空
if(h_x>t_x&&h_x>b_x){
//更新位置
h_x+=1;
}
//3.2).马在左边
else if (h_x<t_x&&h_x<b_x){
//终点在右边--箱子中间
if (b_x<t_x){
//马临界箱子的时候
if(h_x+1==b_x){
//箱子临界终点的时候
if (b_x+1==t_x){
//清空
map[b_y][b_x]="口";
map[t_y][t_x]="口";
//更新位置
h_x+=1;
b_x=t_x;//b_y-=1; 这个时候 b_y=t_y b_x=t_x
//填充位置 在下面 做判断
sum++;
}else {
//清空箱子
map[b_y][b_x]="口";
//更新位置
h_x+=1;
b_x+=1;
}
}else {
h_x+=1;
}
}
//箱子在右边--终点中间
else {
//判断马临界终点的时候
if(h_x+1==t_x){
//当终点前面是箱子
if(t_x+1==b_x){
//判断箱子临界
if(b_x!=9){
//更新位置
h_x+=2;
b_x+=1;
}
}else {
//更新位置
h_x+=2;
}
}else {
h_x+=1;
}
}
}
//3.3).马在中间
else {
//箱子在右边--终点左边(这个不需要管)
if(b_x>t_x){
//临界
if(h_x+1==b_x){
//临界
if (b_x!=9){
//更新位置
h_x+=1;
b_x+=1;
}
}else {
//更新位置
h_x+=1;
}
}
//终点在右边--箱子左边(这个不需要管)
else {
//临界
if(h_x+1==t_x){
//临界
if (t_x!=9){
//更新位置
h_x+=2;
}
}else {
//更新位置
h_x+=1;
}
}
}
}
//4.马Y轴什么都没有
if(h_y!=b_y&&h_y!=t_y) {
h_x+=1;
}
}
map[h_y][h_x]="♘";
//判断 输出OK的时候 sum=1,map[t_y][t_x]="ok";
if(sum==1){
map[t_y][t_x]="ok";
}else {
map[b_y][b_x]="〼";
}
break;
default:
System.out.println("************傻逼************"+"\n*********遵守游戏规则********");
}
//覆盖
drawMap(map);
if(sum==1){
break;
}
}
System.out.println("*****************成功*****************");
}
//定义一个方法 打印地图
public static void drawMap(String [][] map){
//显示地图
for (String[] strings : map) {
for (String string : strings) {
System.out.print(string + "\t");
}
System.out.println();
}
}
}


 浙公网安备 33010602011771号
浙公网安备 33010602011771号