AWR1243+DCA1000——MIMO设置
一、MIMO设置
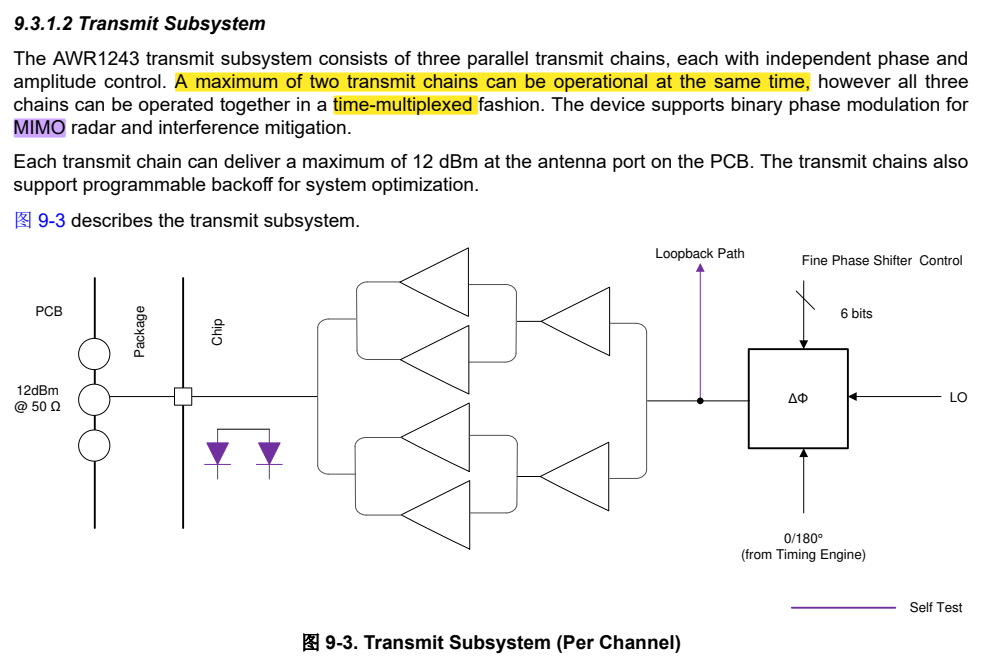
AWR1243为三发四收,每个发射链都有各自独立的相位和增益控制,支持时分多路复用(TDM)MIMO模式,以及最多两个发射天线同时工作。
参考文献:AWR1243单芯片77GHz和79GHzFMCW收发器数据表
TI毫米波雷达芯片(AWR2243)MIMO模式设置
车载毫米波雷达MIMO阵列的天线发射问题
二、TDM-MIMO
1.基于AWR1243的TDM-MIMO读取的数据格式是怎么样的?
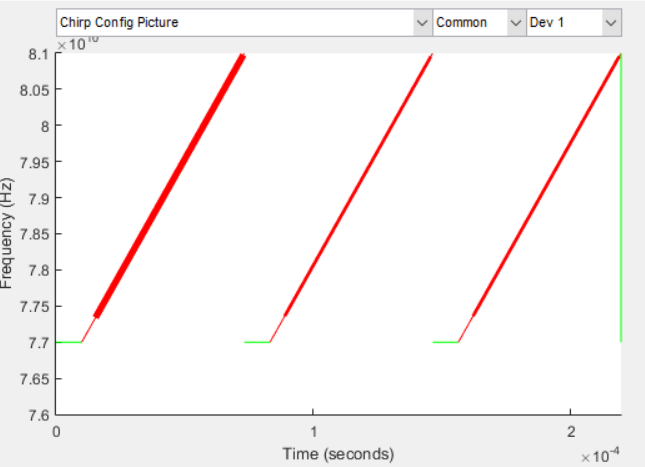
采用多根发射天线,则按照多发的设置方式,发射天线依次轮流发射Chirp信号,多根接收天线则遵循单发多收(SIMO)的格式依次接受回波信号。假设3T1R,1帧中只有1个Chirp,则这1根接收天线相当于依次接收了3个chirp信号(只不过来自3根不同的天线)。因此,adc数据格式与SIMO的相同。

注意:对于一个发射天线来说,其脉冲重复间隔就会增大,导致速度分辨率减小!
Tc = 总的chirp信号时长,包含空闲时间
在使用TDM-MIMO时要注意,Tc是对于同1个Tx的相邻两个Chirp信号之间的间隔 所以要Tc×Ntx => 速度分辨率减小
当然也可以将不同Tx的Chirp信号合并处理,则原有的Tc不变,Nchirp增大Ntx倍(Nchirp×Ntx)=>速度分辨率增大
参考:MIMORadar
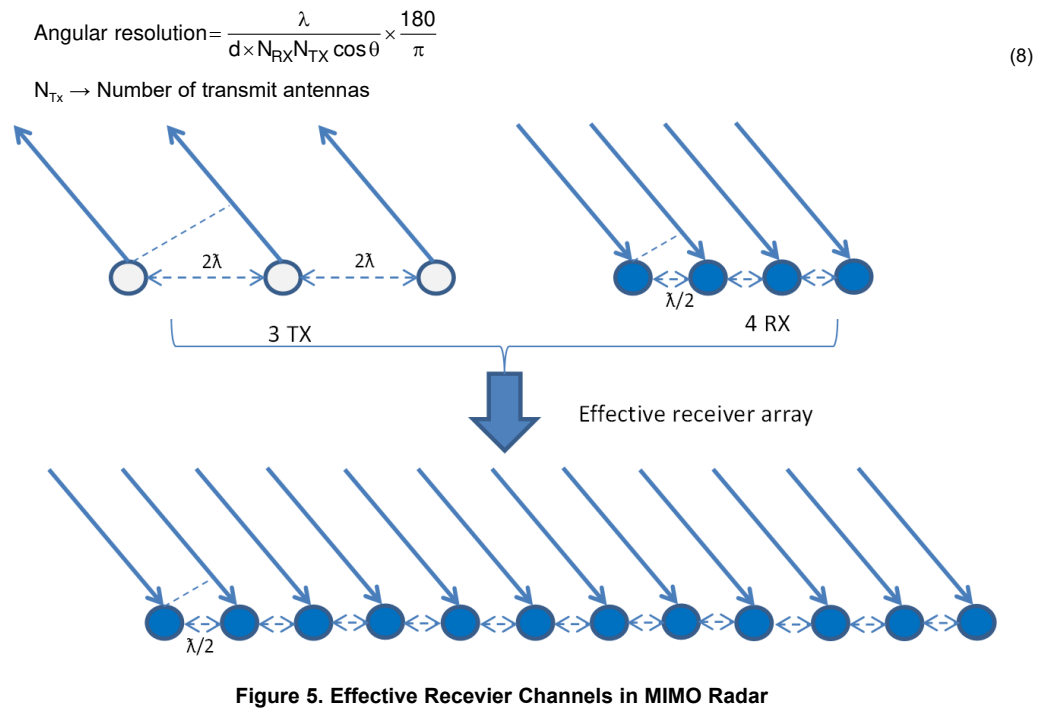
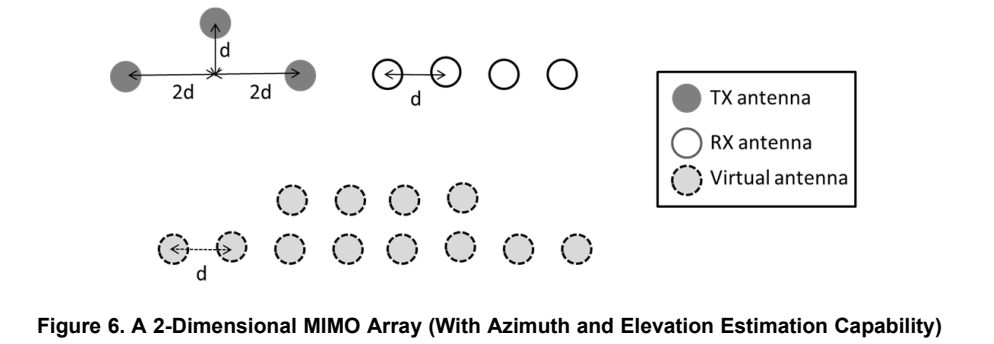
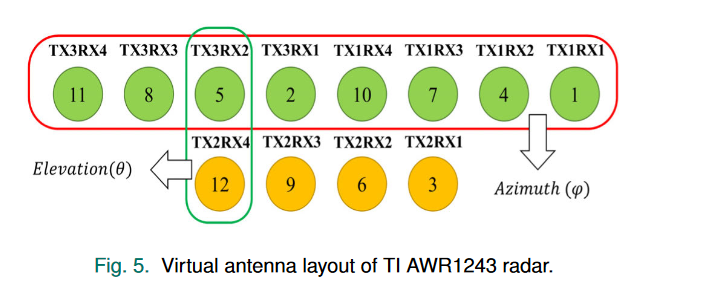
2.利用TDM-MIMO可实现更大的虚拟阵列,以增大角度分辨率。
参考:Programming Chirp Parameters in TI Radar Devices
参考:MIMORadar
参考:Wu Z, Cao Z, Yu X, et al. A Novel Multiperson Activity Recognition Algorithm Based on Point Clouds Measured by Millimeter-Wave MIMO Radar[J]. IEEE Sensors Journal, 2023, 23(17): 19509–19523.
注意:这里等效的虚拟阵列阵元间的间距仍保持原来的小间距;而对于应用毫米波雷达MIMO成像的来说,在等效虚拟阵列过程中,基于“等效相位中心原理”,虚拟阵元之间的间隔是原来间距的1/2。
三、BPM-MIMO
参考:IWR1642BOOST: mmwave studio how to config correct BPM mode?
AWR1642: how to config BPM frame

 浙公网安备 33010602011771号
浙公网安备 33010602011771号