

基于AMC4030的二维滑轨的MATLAB编程控制
- 目的:想要再MATLAB中使用函数"COM_API_GetMachineStatus"以便于获取滑轨的位置、是否停止等信息。
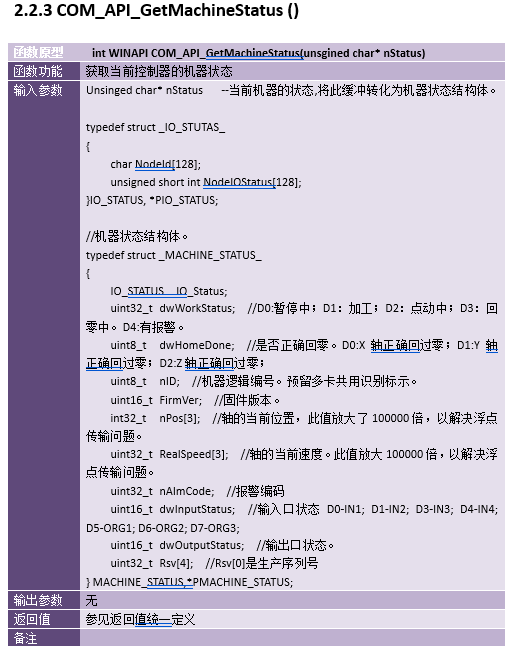
参考:《AMC4030运动控制器编程手册》 - 调研:
- calllib 调用 C 共享库中的函数
- Passing a "char array" as "Int8Ptr" for calllib function argument
- 使用calllib 调用 C 共享库中的函数:
% Load Library From Local FilePath
loadlibrary('AMC4030.dll','ComInterface.h');
libisloaded('AMC4030');
% Connect Device
calllib('AMC4030','COM_API_SetComType',2);
nRtn = calllib('AMC4030','COM_API_OpenLink',13,115200);
% X轴运动 pos:10mm speed:20mm/s
% res = calllib('AMC4030','COM_API_Jog',0,10,20);
% XY轴回零
% y = calllib('AMC4030','COM_API_Home',1,0,1);
%Release Library
unloadlibrary('AMC4030');
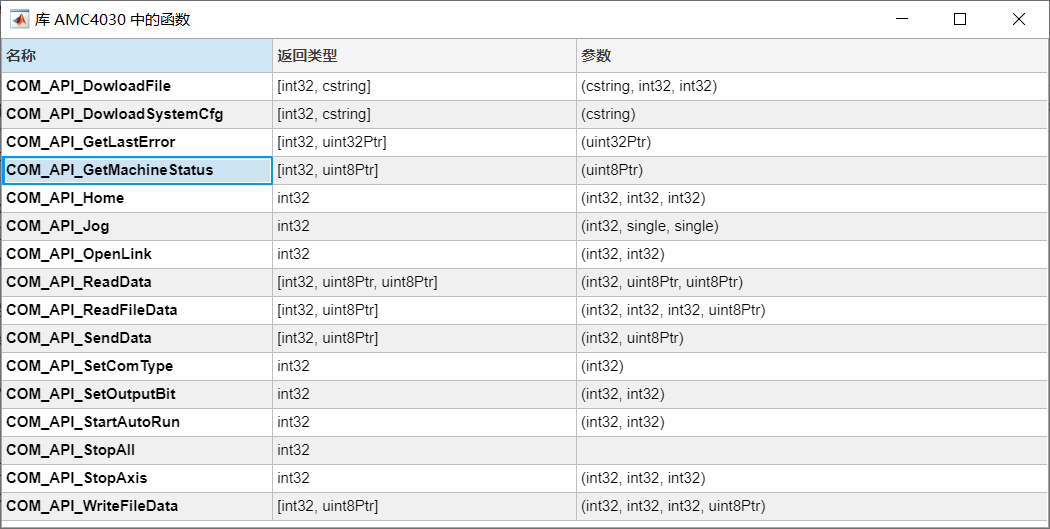
- 使用"libfunctionsview"显示所有的AMC4030函数
libfunctionsview AMC4030
结果:
- 如何传递参数"uint8Ptr"
