AWR1243+DCA100——二维合成孔径(2D-SAR)(上集)
利用AWR1243,通过二维滑轨的机械扫描实现二维平面孔径,可以获取目标场景的三维信息,实现3D成像(水平-垂直-深度)。概念图如下:
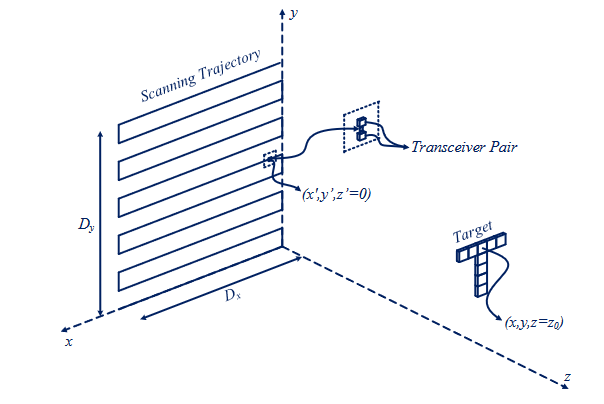
参考:
[1] Yanik.Simplified-2D-mmWave-Imaging
[2] Yanik M, Torlak M. Millimeter-wave near-field imaging with two-dimensional SAR data[A]. 2018.
需要解决的问题:
一、 雷达板如何采样?
两种方式:
- 连续扫描(连续采集):
雷达板发射连续均匀间隔的Chirp信号。
例如,滑轨最大速度:20mm/s,平面孔径大小:200mm×200mm,采样间隔:1mm(1/20=0.05s),设置1帧中只有1个Chirp信号,帧周期:0.05s(50ms),总帧数(即总Chirp数,采样点数)为:40000,扫描时间共计:2000s(=40000*0.05)≈33.3min
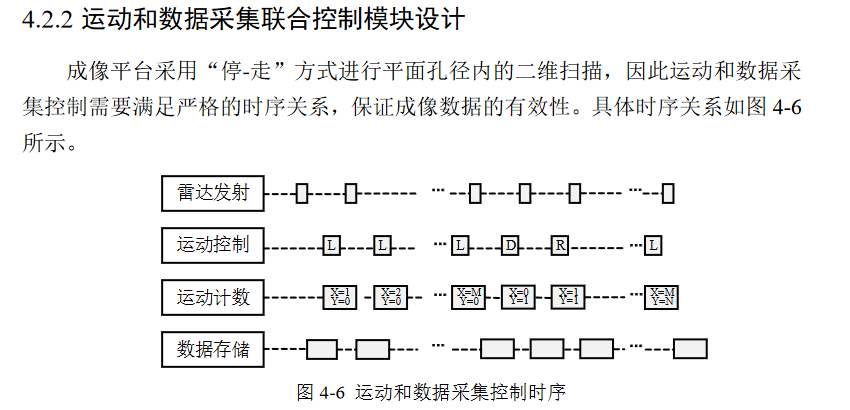
- 离散扫描(一步一停):
滑轨每移动一步则停下来等待雷达板发射1个Chirp信号。
滑轨移动一步 --> 雷达采样 --> 等待雷达采样和数据回传完成 --> 雷达移动一步 --> 雷达采样 --> ...... 如此循环。
在Matlab中通过循环,等待和判断等方法实现。
可预见离散扫描比连续扫描所耗时间更长。
此外,还要考虑以下几点
- 软件触发和硬件触发
- 发送采集命令到完成数据采样生成原始数据包需要多长时间?这涉及到相邻两次触发雷达信号的时间间隔!
参考文献:AWR1843: 用AWR1843与mmwave studio使用LUA采集数据时--Start Record ADC data和--Trigger frame之间可以没有时间间隔吗?
bin文件生成时间见(下集)。
几种雷达平面扫描流程图:
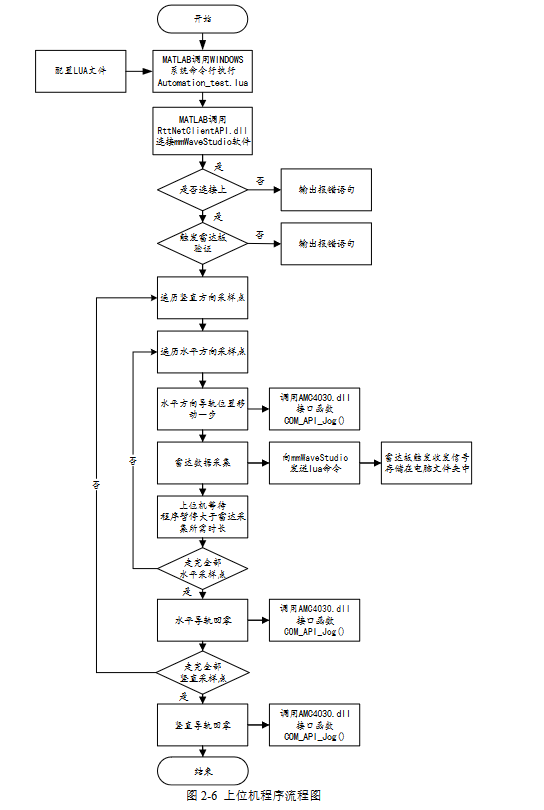
参考:[3] 汪林.基于77GHz的毫米波雷达成像应用研究[D].桂林电子科技大学,2021.
参考:[4] 徐哲.毫米波雷达MIMO-SAR成像研究[D].哈尔滨工业大学,2020.
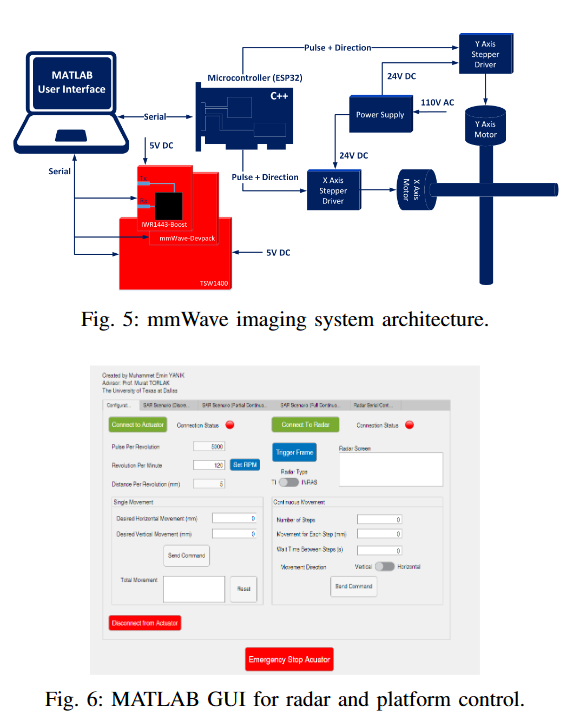
几种雷达扫描系统款框图:
参考:[5] Hao Z, Wang R, Peng J, ea al. Static Hand Gesture Recognition Based on Millimeter-Wave Near-Field FMCW-SAR Imaging[J]. Electronics, 2023, 12: 4013.
二、 雷达板与二维滑轨的同步
MATLAB则通过串口与步进电机控制器通信(问题:如何建立Matlab与滑轨的通信?),实现相应轴导轨的移动。
滑轨运动和雷达数据采集要联合控制,可在Matlab中进行控制,大多数人在Matlab中实现了一个GUI来同时控制二者。
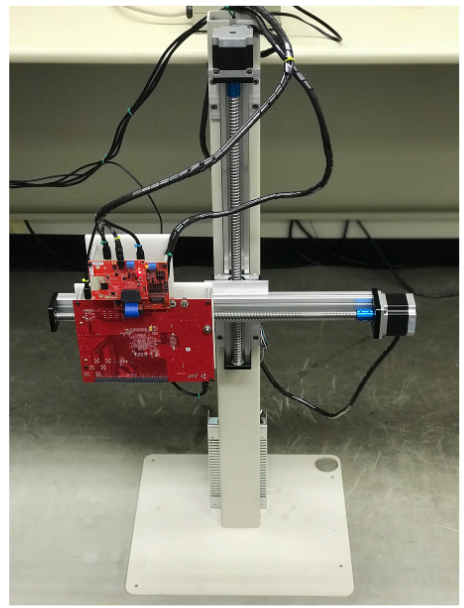
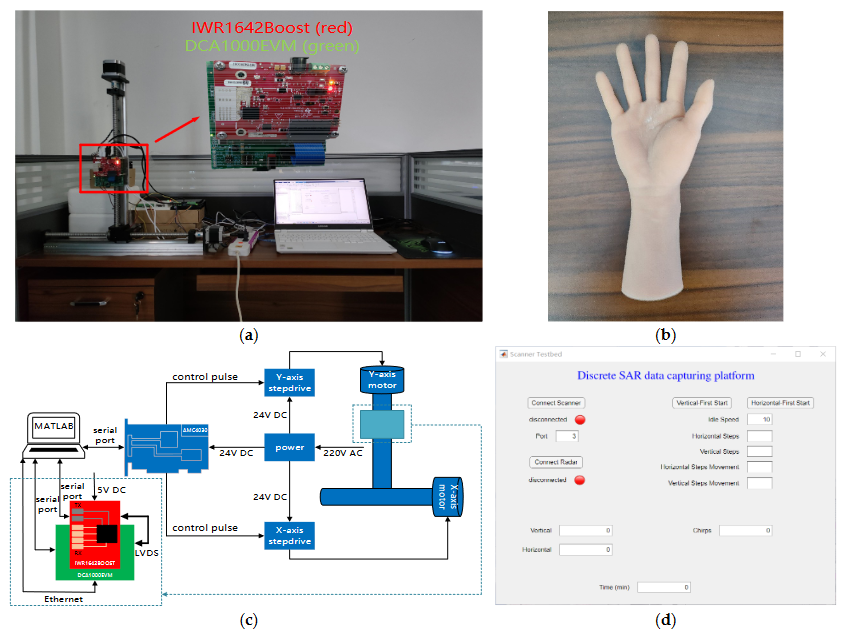
三、 硬件安装
3.1 硬件准备
- AWR1243
- DCA1000
- 二维滑轨FMC4030
- 螺丝、螺母、亚克力板(用于将雷达板以及数据采集板和滑台固定在一起)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号