
使用CMSIS-DSP库进行PID控制
CMSIS-DSP是针对嵌入式系统的优化计算库,支持Cortex-M和Cortex-A内核,可以利用内核的FPU、DSP指令,提高算法的性能。这个库为我们提供了针对内核优化的向量计算、矩阵运算、数字信号处理、电机控制、统计和机器学习算法。
本文将介绍如何使用CMSIS-DSP库,在STM32单片机上,构建增量式PID控制程序。
引入CMSIS-DSP库
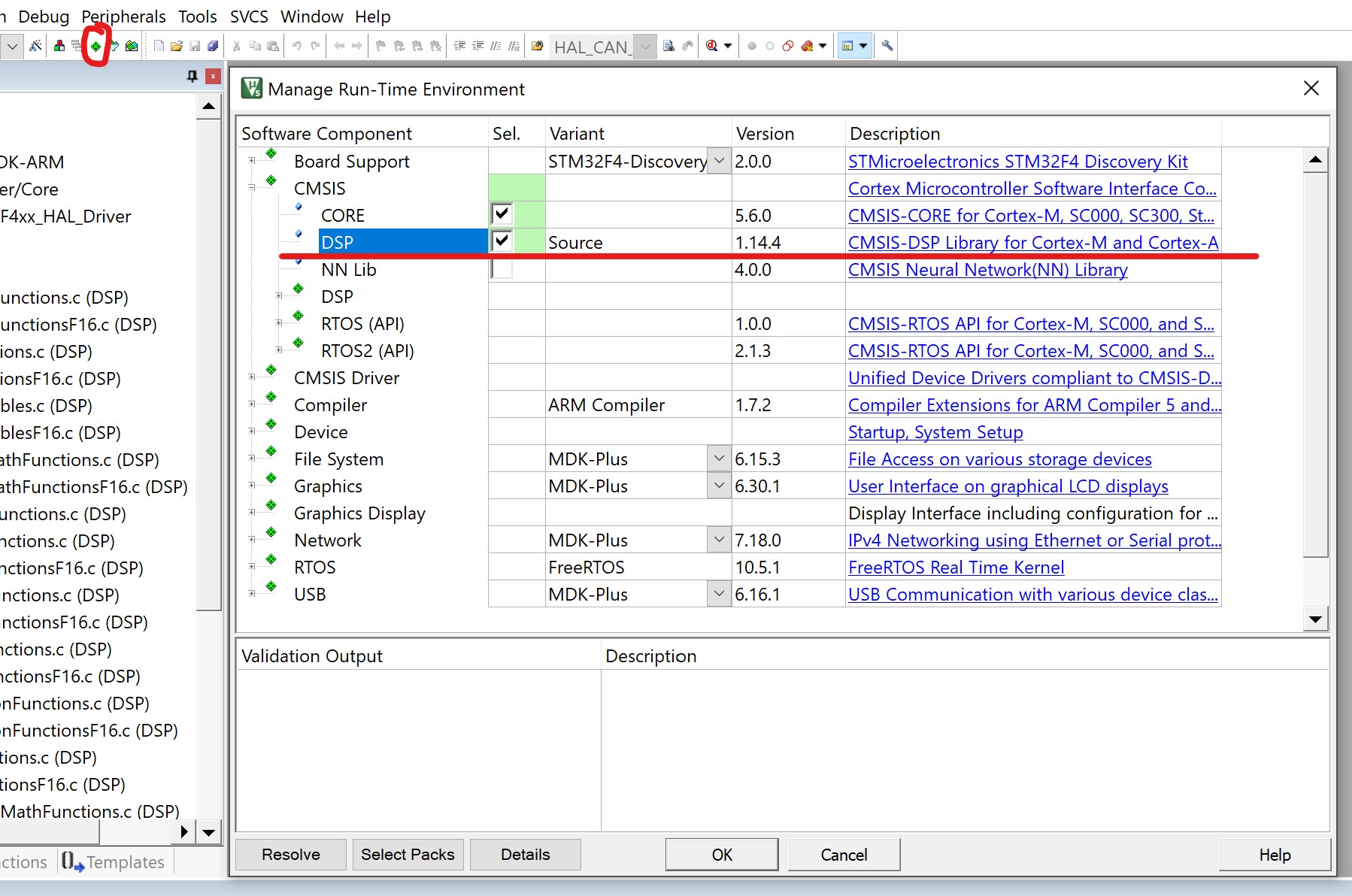
在Keil MDK-Arm中引入CMSIS-DSP库是非常方便的。建立好适用于MDK-Arm的STM32工程后,单击Manage Run-Time Environment,进入MDK-Arm提供的包管理器界面。随后,展开CMSIS,单击DSP右侧的单选框,即可完成库的导入。
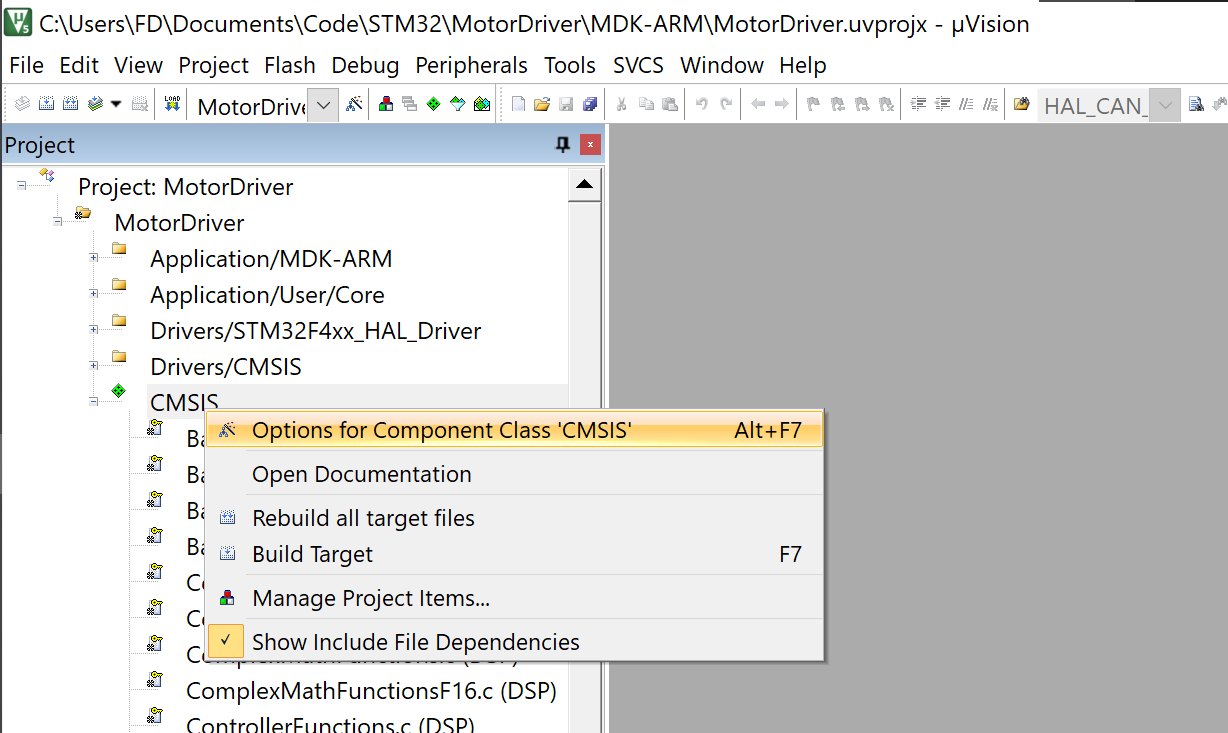
在项目管理器中,右键单击CMSIS库,选择Options for Component Class 'CMSIS',配置DSP库的编译选项。
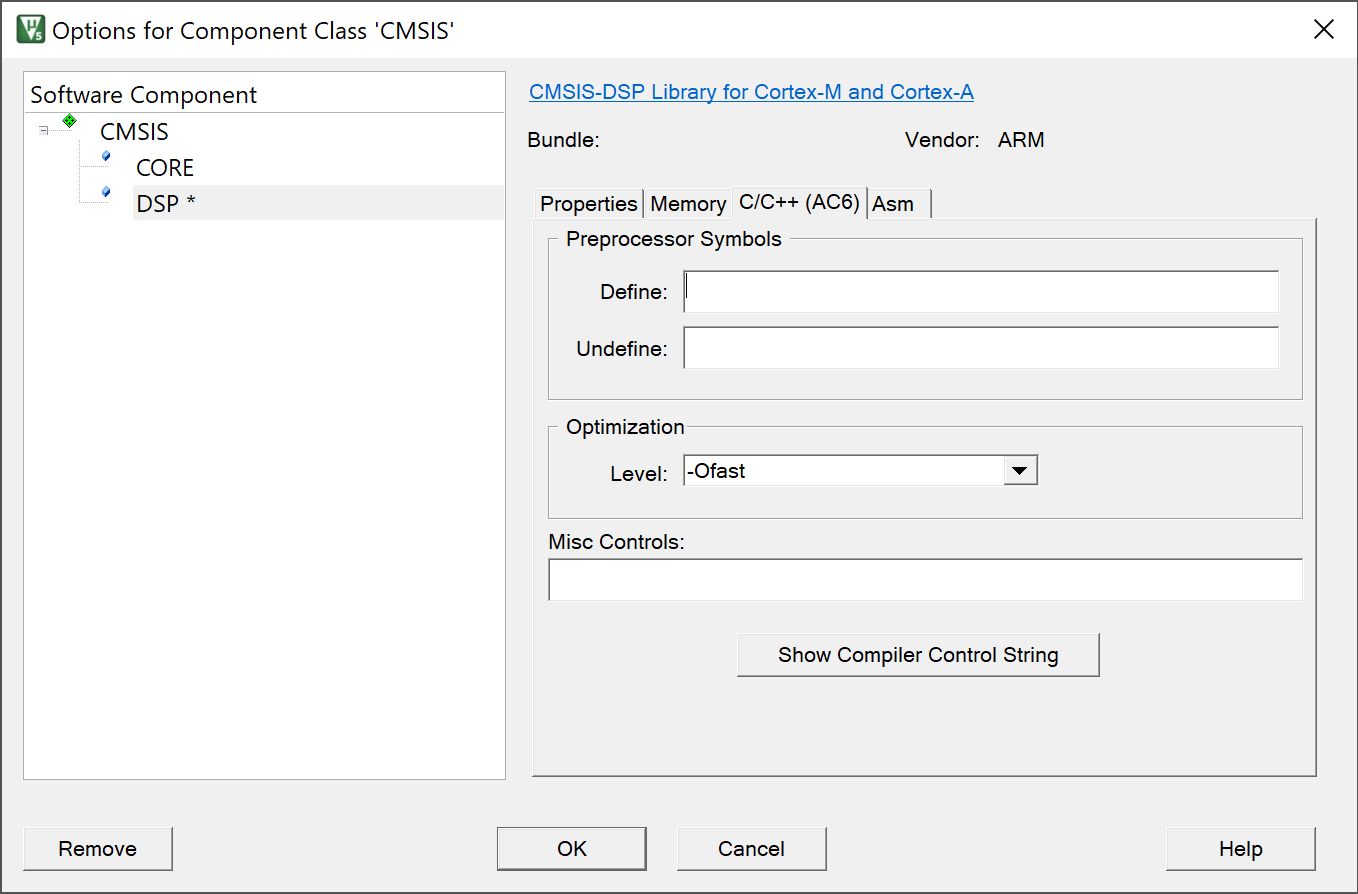
在弹出的界面中,选择DSP库的C/C++编译选项,开启-Ofast优化。
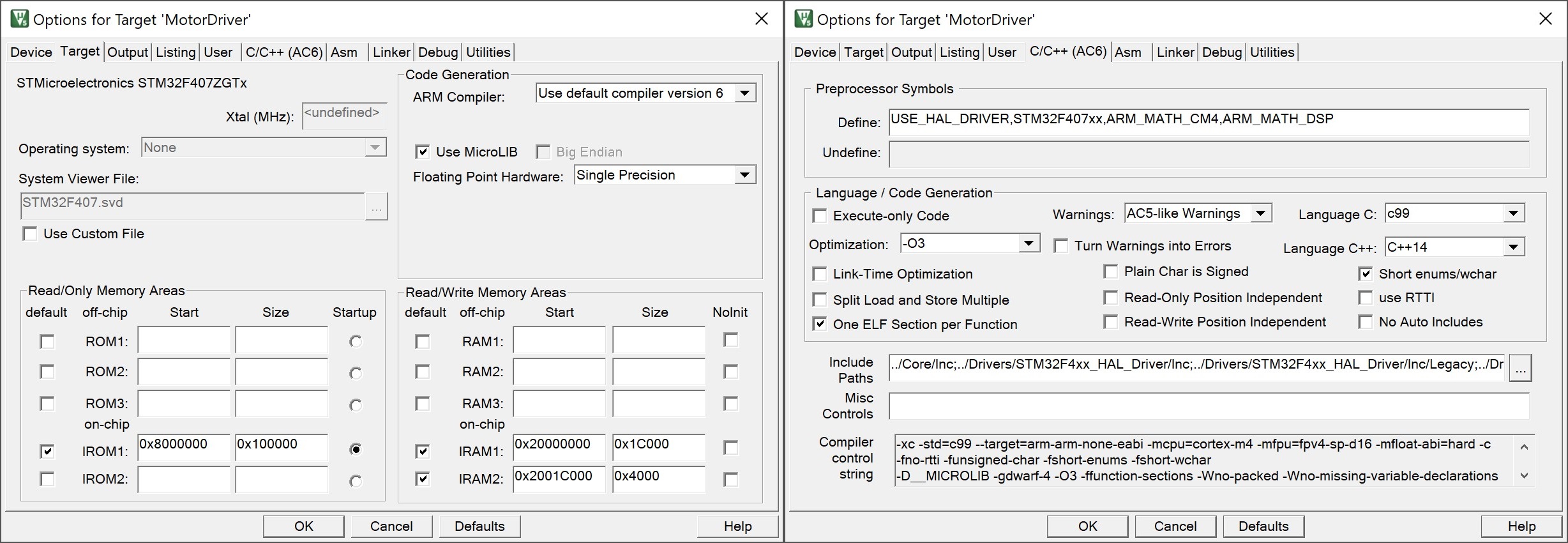
如果您的设备支持FPU,可以在工程的编译选项中,使能Floating Point Hardware并添加ARM_MATH_CM4和ARM_MATH_DSP宏,让CMSIS-DSP库能够利用硬件实现算法的加速。
重新编译工程,若未发现错误,则说明我们已经成功引入了CMSIS-DSP库。
CMSIS-DSP提供的PID算法原理与公式推导
PID控制器(比例-积分-微分控制器),由比例单元(Proportional)、积分单元(Integral)和微分单元(Derivative)组成,是一种在工业控制应用中常见的反馈回路部件。PID控制器可以根据历史和当前的数据,来调整对系统的控制,使系统更加准确而稳定。
PID控制器的输出是关于输入量与被控量偏差的函数,是比例单元、积分单元和微分单元的线性组合,即:
一个完整的PID控制系统的系统框图如下所示:

在本文中,我们称这个系统中的:
- \(y(t)\)为被控量,表示我们需要控制的被控对象的输出量;
- \(r(t)\)为输入量,是我们希望被控量在\(t\)时刻达到的状态或目标;
- \(e(t)\)为输入量与被控量之间的偏差,即:\(e(t) = r(t) - y(t)\);
- \(u(t)\)为操纵量(执行元件的输入);
- \(K_p\)、\(K_i\)、\(K_d\)分别是比例项、积分项和微分项的比例系数,也是我们后续进行PID参数整定所需要调整的参数。
当然,我们在使用MCU进行编程时,我们往往用的是PID控制器的离散形式,即将积分项变为累加项,微分项变为差分项,如下式所示:
式中,\(\Delta t\)为两次相邻采样的时间间隔。我们称这样的PID控制方式为位置式PID。
考虑相邻时刻,操纵量\(u[t]\)的变化量\(\Delta u[t] = u[t] - u[t - 1]\),我们可以得到:
将上式化简,我们发现,PID控制器操纵量的增量,是当前时刻\(t\)、\(t - 1\)时刻和\(t-2\)时刻的偏差的线性组合,即:
我们称通过计算系统输入的变化量\(\Delta u[t]\)实现PID控制的控制方式,称为增量式PID。CMSIS-DSP库中提供的PID算法,使用增量式PID的实现。在增量式PID控制器中,有:
在CMSIS-DSP中的PID实现中,认为\(\Delta t = 1\)(或者说假定用户已经将\(\Delta t\)加权至\(K_i\)和\(K_d\)构成新的\(K_i\)和\(K_d\))。那么,\(u[t]\)的变化量\(\Delta u[t]\)可以用下面的式子如式(6):
其中:
因此,在增量式PID系统中,合并式(5)和式(6),我们可以通过式(8)计算操纵量\(u[t]\)。这个式子,也是CMSIS-DSP库中,PID的实现原理:
对于拥有DSP的指令的芯片,在编译器强大的优化功能下,可以在一个指令周期内完成式(8)所示的乘加运算。这大大提高了PID的计算速度。
CMSIS-DSP库的PID控制接口
数据类型
CMSIS-DSP库的PID控制器,有基于三种基于不同数据类型的实现。这三种数据类型分别是q15,q31和f32,分别表示:16位有符号整数int16_t、32位有符号整数int32_t、32位浮点数float32_t。
在CMSIS-DSP库实现的PID控制器,函数和结构体的命名都是“名称+数据类型后缀”的命名方式。例如:arm_pid_instance_q15、arm_pid_instance_q31和arm_pid_instance_f32是基于不同数据类型实现的PID控制的结构体;arm_pid_q15、arm_pid_q31和arm_pid_f32是基于不同数据类型实现的计算PID增量的函数。
在接下来的文段中,我们将以f32类型为例,介绍如何使用CMSIS-DSP库的PID控制器进行PID控制,若要使用其它数据类型的PID实现,只需按照这种命名方式,换用相应数据类型的函数、结构体即可。
PID控制结构体的定义
在CMSIS-DSP中,PID的参数信息、历史误差信息,都被记录在arm_pid_instance_xxx结构体中,例如:
/**
* @ingroup PID
* @brief Instance structure for the floating-point PID Control.
*/
typedef struct {
float32_t A0; /**< The derived gain, A0 = Kp + Ki + Kd . */
float32_t A1; /**< The derived gain, A1 = -Kp - 2Kd. */
float32_t A2; /**< The derived gain, A2 = Kd . */
float32_t state[3]; /**< The state array of length 3. */
float32_t Kp; /**< The proportional gain. */
float32_t Ki; /**< The integral gain. */
float32_t Kd; /**< The derivative gain. */
} arm_pid_instance_f32;
若我们认为当前时刻为\(t\)时刻,则结构体中各个参数的定义如下所示:
Kp、Ki和Kd需要我们自行设置,分别是比例项、积分项和微分项的比例系数\(K_p\)、\(K_i\)和\(K_d\);A0、A1和A2分别对应式(7)中的\(A_0\),\(A_1\)和\(A_2\),其具体意义与前文所述一致;state是PID控制的状态数组。state[0]表示\(t - 1\)时刻的偏差,即\(e[t-1]\);state[1]表示\(t - 2\)时刻的偏差,即\(e[t-2]\);state[2]表示的是前1时刻的操纵量,即\(u[t - 1]\)
PID控制结构体的初始化
当我们在初始化这个结构体的时候,我们需要且只需手动对Kp、Ki和Kd这三个成员进行赋值。之后,我们需要调用arm_pid_init_xxx函数,初始化这个结构体。
arm_pid_init_xxx函数接受两个参数,第一个参数是PID控制结构体的指针,第二个参数是一个整数标志位,当它为0时,只计算A0、A1和A2的值,不初始化state数组;当它为1时,则初始将state数组,将其置为0。在编程中,如果我们首次初始化该结构体,则应当将resetStateFlag置为1;当我们非首次初始化(如PID参数整定过程中),我们需要更新Kp、Ki或Kd的值,我们可以将其置为0,以提高性能。
这个函数初始化的过程分两步:
- 利用
Kp、Ki和Kd,通过我们先前推导的公式,计算A0、A1和A2的值。 - 若
resetStateFlag参数为1,则将state数组置为0。
/**
* @brief Initialization function for the floating-point PID Control.
* @param[in,out] S points to an instance of the PID structure
* @param[in] resetStateFlag
* - value = 0: no change in state
* - value = 1: reset state
* @return none
*/
void arm_pid_init_f32(arm_pid_instance_f32 *S, int32_t resetStateFlag) {
/* Derived coefficient A0 */
S->A0 = S->Kp + S->Ki + S->Kd;
/* Derived coefficient A1 */
S->A1 = (-S->Kp) - ((float32_t) 2.0f * S->Kd);
/* Derived coefficient A2 */
S->A2 = S->Kd;
/* Check whether state needs reset or not */
if (resetStateFlag) {
/* Reset state to zero, The size will be always 3 samples */
memset(S->state, 0, 3U * sizeof(float32_t));
}
}
当我们进行PID参数整定时,需要不断地调整\(K_p\)、\(K_i\)和\(K_d\)的值。我们每次调整\(K_p\)、\(K_i\)和\(K_d\)的值,都应该调用这个函数,重新计算\(A_0\)、\(A_1\)和\(A_2\)的值。但是此时,我们可以不重置state数组。
操纵量的更新
作为一种反馈控制算法,PID控制算法是一种按偏差进行控制的过程。由于扰动或输入量变化等因素的影响,偏差往往不恒为0;而我们的控制系统,为了达到尽量让偏差为0的目标,需要对输出量进行采样,与输入量不断地更新操纵量\(u[t]\),以使得被控量贴合输入量。
对于增量式PID算法,其核心步骤就在于计算操纵量的变化量\(\Delta u[t]\),并更新操纵量\(u[t]\)。\(u[t]\)的计算,可以通过arm_pid_xxx进行计算。这个函数的输入是当前时刻的偏差\(e[t]\),输出的是操纵量\(u[t]\)。
值得注意的是,arm_pid_xxx函数不会对输出进行限幅,关于这一点,我们将在后续进行更深入的讨论。
/**
* @ingroup PID
* @brief Process function for the floating-point PID Control.
* @param[in,out] S is an instance of the floating-point PID Control structure
* @param[in] in input sample to process
* @return processed output sample.
*/
__STATIC_FORCEINLINE float32_t arm_pid_f32(arm_pid_instance_f32 * S, float32_t in) {
float32_t out;
/* u[t] = u[t - 1] + A0 * e[t] + A1 * e[t - 1] + A2 * e[t - 2] */
out = (S->A0 * in) +
(S->A1 * S->state[0]) + (S->A2 * S->state[1]) + (S->state[2]);
/* Update state */
S->state[1] = S->state[0];
S->state[0] = in;
S->state[2] = out;
/* return to application */
return (out);
}
状态的清除
在arm_pid_xxx函数中,是否清空状态数组state取决于我们输入的参数。当我们未修改Kp、Ki或Kd的值,不需要重新更新A0、A1和A2的值时,若我们要清空状态数组state时,可以使用arm_pid_reset_xxx函数。
/**
* @brief Reset function for the floating-point PID Control.
* @param[in,out] S points to an instance of the floating-point PID structure
* @return none
* @par Details
* The function resets the state buffer to zeros.
*/
void arm_pid_reset_f32(arm_pid_instance_f32 *S) {
/* Reset state to zero, The size will be always 3 samples */
memset(S->state, 0, 3U * sizeof(float32_t));
}
PID控制的实现
基础控制
根据上面的介绍,我们使用PID进行积分控制的方法,也就呼之欲出了。其伪代码如下所示:
void pid_control(float Kp, float Ki, float Kp, float delta_t) {
// 在CMSIS-DSP中的PID实现中,认为Δt = 1,
// 故需要调整Kp和Ki的值,保证系统在采样率变化时的鲁棒性
arm_pid_instance_f32 controller = {
.Kp = Kp,
.Ki = Ki * delta_t,
.Kd = Kd / delta_t
};
arm_pid_init_f32(&controller, 1); // 初始化结构体,要记得清空state数组
while (1) {
const float r = get_reference(); // 读取当前系统的输入量
const float y = get_status(); // 读取当前的被控量
const float error = r - y; // 计算偏差
const float u = arm_pid_f32(&controller, error); // 计算PID的操纵量
execute(u); // 使用最新的操纵量,调整执行元件,实现控制
delay(delta_t); // 实际可以使用定时器等机制,实现循环体中语句的定期执行
}
}
输出限幅的控制
在实际工程中,受硬件条件的限制,操纵量往往是有一定范围的。如矩形波占空比的大小,只能是0~100%;输出电压的大小,不会超过系统中的最高电压;电流的大小,也不会越过欧姆定律的限制……
但是,CMSIS-DSP库的PID实现,为了追求极致的效率,未将这一点纳入考量。当我们在这样的控制系统中应用上面的控制程序,就有可能出现\(u[t]\)趋向于无穷的情况。此时,当PID控制器的输入量发生变化,PID控制器可能不会及时的响应。这时,我们要人为地限定操纵量的大小,使其符合工程实际。我们称这样的操作为“输出限幅”。
使用CMSIS-DSP库实现PID,当我们需要进行输出限幅地时候,需要修改stete数组的第三个成员——记录着上一时刻操纵量的\(u[t-1]\)的state[2]成员,保证其在合理的范围内,避免超出工程实际的幅值。具体实现如下所示:
void pid_control(float Kp, float Ki, float Kp, float delta_t) {
// 在CMSIS-DSP中的PID实现中,认为Δt = 1,
// 故需要调整Kp和Ki的值,保证系统在采样率变化时的鲁棒性
arm_pid_instance_f32 controller = {
.Kp = Kp,
.Ki = Ki * delta_t,
.Kd = Kd / delta_t
};
arm_pid_init_f32(&controller, 1); // 初始化结构体,要记得清空state数组
while (1) {
const float r = get_reference(); // 读取当前系统的输入量
const float y = get_status(); // 读取当前的被控量
const float error = r - y; // 计算偏差
arm_pid_f32(&controller, error); // 计算PID的操纵量
// 进行输出限幅
if (controller.state[2] > OUTPUT_MAX) {
controller.state[2] = OUTPUT_MAX;
} else if (controller.state[2] < OUTPUT_MIN) {
controller.state[2] = OUTPUT_MIN;
}
// 完成输出限幅,用限幅后的操纵量控制系统
execute(controller.state[2]); // 使用最新的操纵量,调整执行元件,实现控制
delay(delta_t); // 实际可以使用定时器等机制,实现循环体中语句的定期执行
}
}
总结
关于使用CMSIS-DSP库实现PID控制,无论是中外的互联网上,资料都很少。官方文档目前仍没有提供例程。但是当我们理解了增量式PID的计算公式后,再来看CMSIS-DSP库的PID控制接口,实际上它是非常简单,甚至是简陋的。这也是为什么我以解读源码的方式,写下这篇文章。
CMSIS-DSP库的PID控制接口,其优化思路,主要还是在于写出利于编译器优化的代码(如将复杂的PID计算过程,转换为式(8)所示的乘加运算),借助现代编译器强大的优化功能,提高代码的性能。此外,对于被反复调用的arm_pid_xxx函数,这个库也使用了__STATIC_FORCEINLINE,强制编译器进行内联。这些优化技巧,是值得我们学习的。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号