

[转]PCL几种采样方法 - Bein
(1)下采样 Downsampling
一般下采样是通过构造一个三维体素栅格,然后在每个体素内用体素内的所有点的重心近似显示体素中的其他点,这样体素内所有点就用一个重心点来表示,进行下采样的来达到滤波的效果,这样就大大的减少了数据量,特别是在配准,曲面重建等工作之前作为预处理,可以很好的提高程序的运行速度,

#include <pcl/io/pcd_io.h>
#include <pcl/filters/voxel_grid.h>
int
main(int argc, char** argv)
{
// 创建点云对象
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr filteredCloud(new pcl::PointCloud<pcl::PointXYZ>);
// 读取PCD文件
if (pcl::io::loadPCDFile<pcl::PointXYZ>(argv[1], *cloud) != 0)
{
return -1;
}
// 创建滤波对象
pcl::VoxelGrid<pcl::PointXYZ> filter;
filter.setInputCloud(cloud);
// 设置体素栅格的大小为 1x1x1cm
filter.setLeafSize(0.01f, 0.01f, 0.01f);
filter.filter(*filteredCloud);
}
实验结果(略)
(2)
均匀采样:这个类基本上是相同的,但它输出的点云索引是选择的关键点在计算描述子的常见方式。
这里的filter.compute 是错误的,但是我也没搞明白应该怎么写,有懂得还望能告知一声!
#include <pcl/io/pcd_io.h>
#include <pcl/keypoints/uniform_sampling.h>
int
main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr filteredCloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>(argv[1], *cloud) != 0)
{
return -1;
}
// Uniform sampling object.
pcl::UniformSampling<pcl::PointXYZ> filter;
filter.setInputCloud(cloud);
filter.setRadiusSearch(0.01f);
// We need an additional object to store the indices of surviving points.
pcl::PointCloud<int> keypointIndices;
filter.compute(keypointIndices);
pcl::copyPointCloud(*cloud, keypointIndices.points, *filteredCloud);
}
(3)增采样 :增采样是一种表面重建方法,当你有比你想象的要少的点云数据时,增采样可以帮你恢复原有的表面(S),通过内插你目前拥有的点云数据,这是一个复杂的猜想假设的过程。所以构建的结果不会百分之一百准确,但有时它是一种可选择的方案。所以,在你的点云云进行下采样时,一定要保存一份原始数据!
#include <pcl/io/pcd_io.h>
#include <pcl/surface/mls.h>
int main(int argc,char** argv)
{
// 新建点云存储对象
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr filteredCloud(new pcl::PointCloud<pcl::PointXYZ>);
// 读取文件
if (pcl::io::loadPCDFile<pcl::PointXYZ>(argv[1], *cloud) != 0)
{
return -1;
}
// 滤波对象
pcl::MovingLeastSquares<pcl::PointXYZ, pcl::PointXYZ> filter;
filter.setInputCloud(cloud);
//建立搜索对象
pcl::search::KdTree<pcl::PointXYZ>::Ptr kdtree;
filter.setSearchMethod(kdtree);
//设置搜索邻域的半径为3cm
filter.setSearchRadius(0.03);
// Upsampling 采样的方法有 DISTINCT_CLOUD, RANDOM_UNIFORM_DENSITY
filter.setUpsamplingMethod(pcl::MovingLeastSquares<pcl::PointXYZ, pcl::PointXYZ>::SAMPLE_LOCAL_PLANE);
// 采样的半径是
filter.setUpsamplingRadius(0.03);
// 采样步数的大小
filter.setUpsamplingStepSize(0.02);
filter.process(*filteredCloud);
}
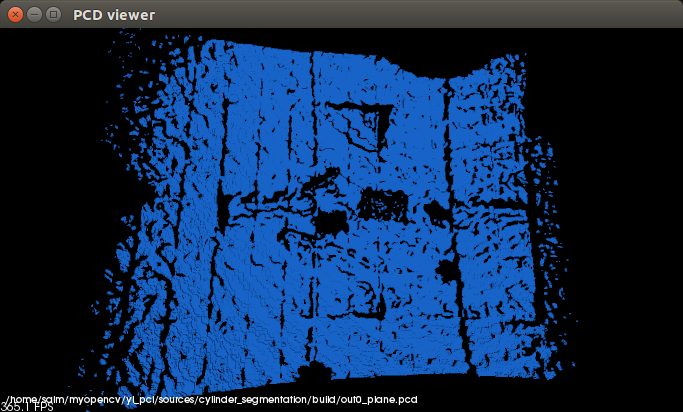
实验的结果
原始图像可视化:
(4)表面重建
深度传感器的测量是不准确的,和由此产生的点云也是存在的测量误差,比如离群点,孔等表面,可以用一个算法重建表面,遍历所有的点云和插值数据,试图重建原来的表面。比如增采样,PCL使用MLS算法和类。执行这一步是很重要的,因为由此产生的点云的法线将更准确。
#include <pcl/io/pcd_io.h>#include <pcl/surface/mls.h>#include <pcl/visualization/pcl_visualizer.h>#include <pcl/visualization/cloud_viewer.h>#include <boost/thread/thread.hpp>intmain(int argc, char** argv){ pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>); pcl::PointCloud<pcl::PointNormal>::Ptr smoothedCloud(new pcl::PointCloud<pcl::PointNormal>); if (pcl::io::loadPCDFile<pcl::PointXYZ>(argv[1], *cloud) != 0) { return -1; } // Smoothing object (we choose what point types we want as input and output). pcl::MovingLeastSquares<pcl::PointXYZ, pcl::PointNormal> filter; filter.setInputCloud(cloud); // Use all neighbors in a radius of 3cm. filter.setSearchRadius(0.03); // If true, the surface and normal are approximated using a polynomial estimation // (if false, only a tangent one). filter.setPolynomialFit(true); // We can tell the algorithm to also compute smoothed normals (optional). filter.setComputeNormals(true); // kd-tree object for performing searches. pcl::search::KdTree<pcl::PointXYZ>::Ptr kdtree; filter.setSearchMethod(kdtree); filter.process(*smoothedCloud); boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("smooth"));viewer->addPointCloud<pcl::PointNormal>(smoothedCloud,"smoothed");while(!viewer->wasStopped()) { viewer->spinOnce(100);boost::this_thread::sleep(boost::posix_time::microseconds(1000000)); }}
运行即可查看结果
原始图像(加了颜色)
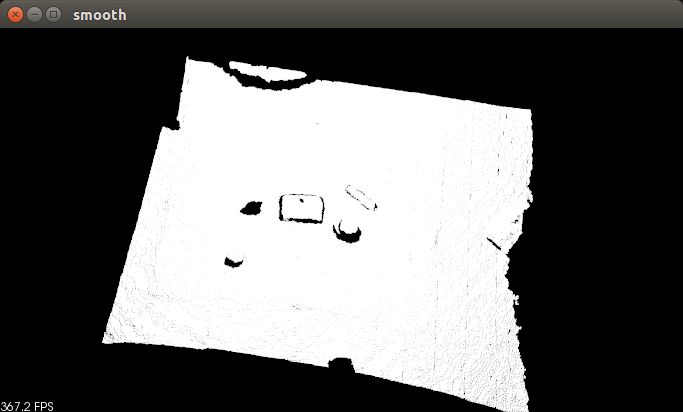
增采样平滑后(没有颜色信息)
微信公众号号可扫描二维码一起共同学习交流

---------------------
作者:Being_young
来源:CNBLOGS
原文:https://www.cnblogs.com/li-yao7758258/p/6527969.html
版权声明:本文为作者原创文章,转载请附上博文链接!
内容解析By:CSDN,CNBLOG博客文章一键转载插件


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· AI与.NET技术实操系列:基于图像分类模型对图像进行分类
· go语言实现终端里的倒计时
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 分享一个免费、快速、无限量使用的满血 DeepSeek R1 模型,支持深度思考和联网搜索!
· 25岁的心里话
· 基于 Docker 搭建 FRP 内网穿透开源项目(很简单哒)
· 闲置电脑爆改个人服务器(超详细) #公网映射 #Vmware虚拟网络编辑器
· ollama系列01:轻松3步本地部署deepseek,普通电脑可用