

PNP方法是为了解决在当前两帧图像中,已知前一帧图像上的3dLandmark点和当前帧的2d特征点,求取当前帧的pose。
PNP主要有P3P、EPNP、UPNP、DLT、MRE(LS Iteration,g2o).
一、p3p
p3p主要是根据针孔模型原理,即3d点投影到相机归一化坐标系再汇集到光心,如下图所示:

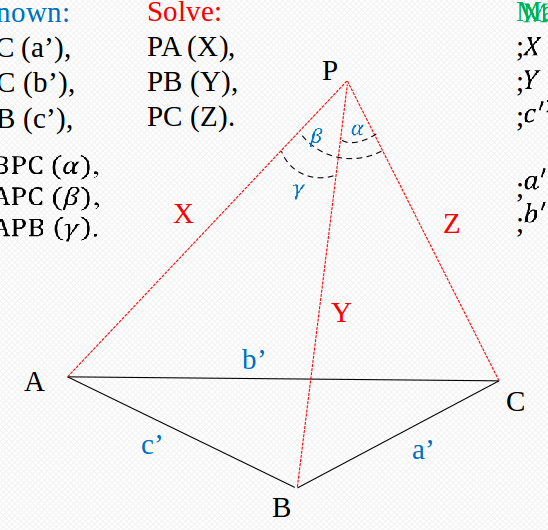
因此根据上右图中的模型,A,B,C为3D点,已知a'=|BC|,b'=|AC|,c'=|AB|,α=<PB,PC>,β=<PA,PB>,γ=<PA,PC>,其中角度可由归一化平面内对应的点求出。令a'2=ac'2,b'2=bc'2.
再令未知数X=PA,YPB,Z=PC,X=xZ,Y=yZ,c'2=vZ2,p=2cosα,q=2cosβ,r=2cosγ,则a'2=ac'2=avZ2,b'2=bc'2=bvZ2.
然后根据三角形的余弦定理,分别在三个三角形中列方程:
Y2+Z2-2YZcosα=a'2
X2+Z2-2XZcosβ=b'2
Y2+X2-2YXcosγ=c'2
同时有一个约束方程:P,A,B,C不共面:p2+q2+r2-pqr-1≠0;必须满足这个约束条件
再将三个方程替换成以下形式:
(1-a)y2-ax2+axyr-yp+1=0
(1-b)x2-by2+bxyr-xq+1=0
上式中,只有x和y是未知数,且为二元二次方程,采用吴零点分解方法(可参考论文),求解出x,y以及之前的v,最后求出X,Y,Z:
Z=c'/√v,X=xZ,Y=yZ;
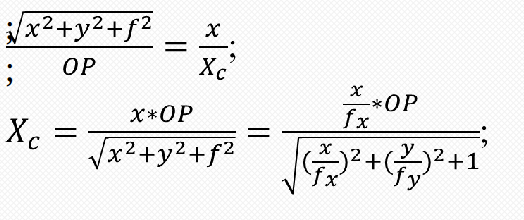
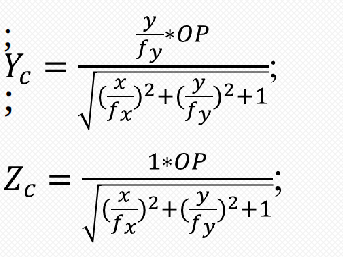
求出3d点到光心的距离之后(即3d点在相机坐标系下的据光心的距离),根据三角形相似原理,分别求出A,B.C点在相机坐标系下的坐标。
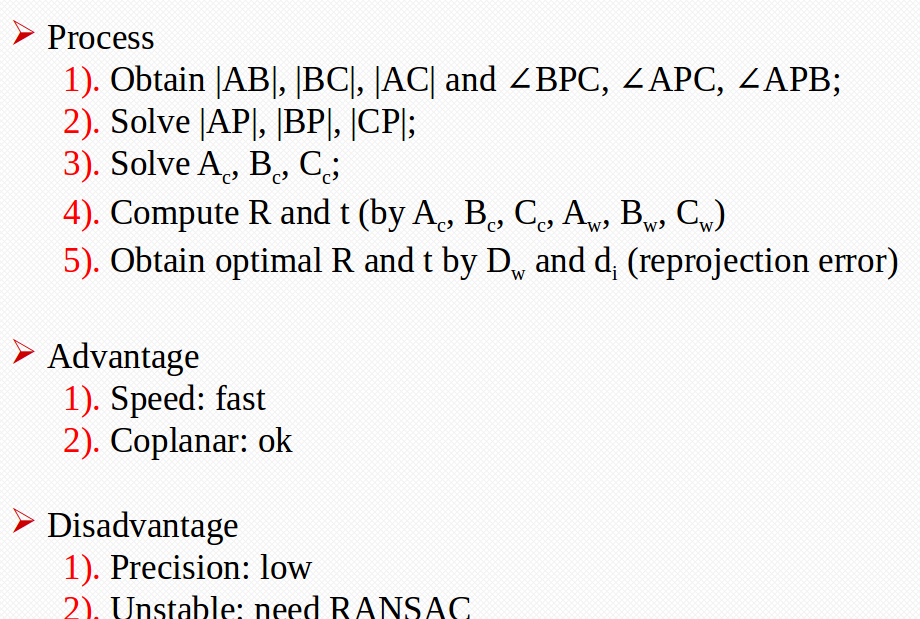
最后就是ICP问题,3d-3d,求R,t.最后将求出的R,t 再做非线性迭代,即可得到精度一般的pose。最后附上p3p流程:


 浙公网安备 33010602011771号
浙公网安备 33010602011771号