13 Ray Tracing(Whitted-Style Ray Tracing)
关键点
- Shading Mapping
- Recursive Ray Tracing(Whitted-style)
- Ray-Surface Intersection(Implicit Surface)
- Ray-Surface Intersection(Triangle Mesh -- Moller Trumbore Algorithm)
- Accelerating Ray-Surface Intersection(Bounding Volumes:Uniform box -> KD Tree -> BVH)
1. Shadow Mapping
1.1 步骤
- Render from Light
从光源看向场景,做光栅化,记录能看到的点的深度,得到从光源出发的深度图。 - Project to Light
从摄像机看向场景,做光栅化,将其中的点投影会光源深度图上,得到光源深度图上的对应像素的深度,此外计算出实际深度,如果深度一致,则该点可以同时被光源和摄像机看到;否则,如果深度不一致,则该点被其他点挡住,不能被摄像机看到。
1.2 问题
- 因为深度记录是浮点数,难以判断相等。因此,判断大小,即实际距离大于深度图距离被判定为阴影。但是仍然存在很接近的深度,所以在深度图深度上增加一个bias来比较大小。当然,这些都不能本质上解决问题。

- 此外,shadow map具有分辨率,如果其分辨率很低,那么阴影信息是走样的,会形成锯齿阴影。
- 需要渲染两遍,开销很大。
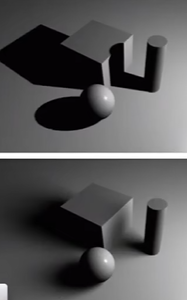
- 只能处理点光源的硬阴影(因为点光源没有大小,所以点要么在阴影中,要么不在,如果是有大小的光源,那么不同光源位置的阴影不同,其综合效果即软阴影)。
2. 光线追踪
2.1 光栅化与光线追踪
2.1.1光栅化
缺点
- 光栅化只能处理点光源的硬阴影。

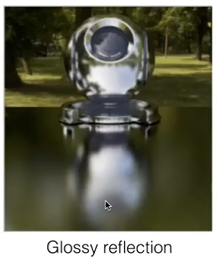
- 光栅化不能解决Glossy Reflection,即光线经过两次反射入眼。
- 光栅化不能解决Indirection illumination间接光照,即光线多次弹射。

优点
- 生成速度快
2.1.2 光线追踪
缺点
- 速度慢,应用于离线处理。
优点
- 高质量
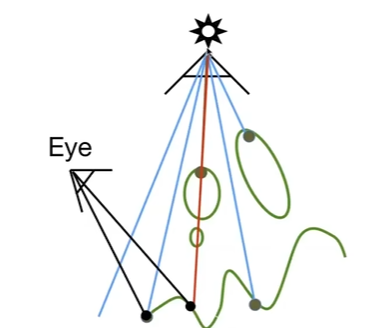
2.2 Light Rays
2.2.1 定义
- 沿直线传播
- 不会碰撞
- 从光源发出,经过若干次反射,进入眼睛;因此光线具有可逆性Reciprocity。
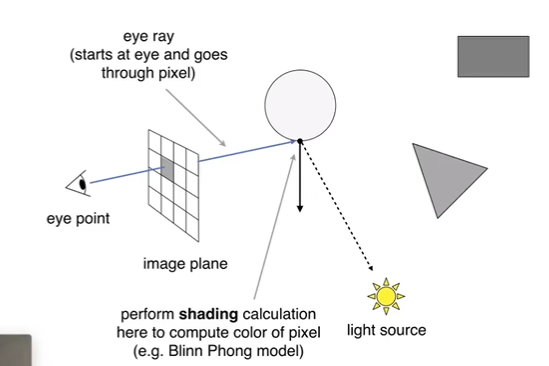
2.3 Ray Casting
假设光源是点光源,眼睛是一个点,光线会完整反射。从眼镜透过像素发出光线eye ray打到场景中最近的一个物体,记录最近的交点。从该点向光源发出一条光线,如果中间没有物体阻挡,那么光源可知照亮该点,否则在阴影里。在得到两个光线后,结合法线,那么可以进行着色。
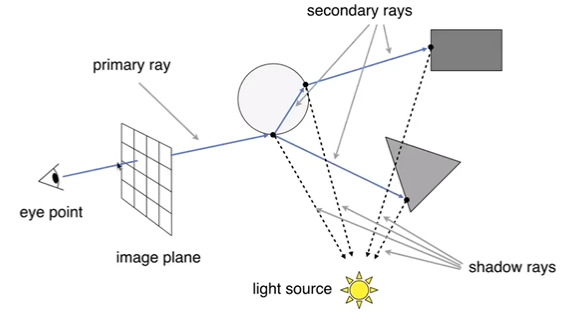
2.4 Recursive Ray Tracing(Whitted-style)
所有从眼睛发出的光线primary ray在打到点上后,进行折射与反射得到secondary ray,再次打到其他点上,最后所有点都与光源做连线shadow ray判断是否被照亮。将所有可被照亮的点的光路的着色结果都加起来。
3. Ray-Surface Intersection
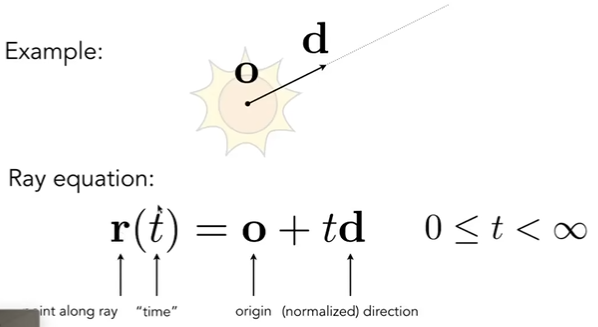
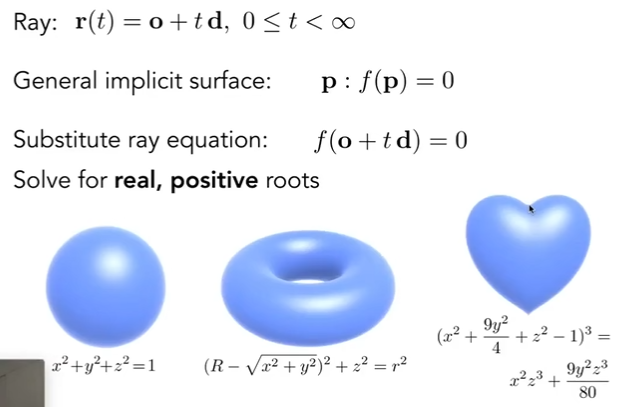
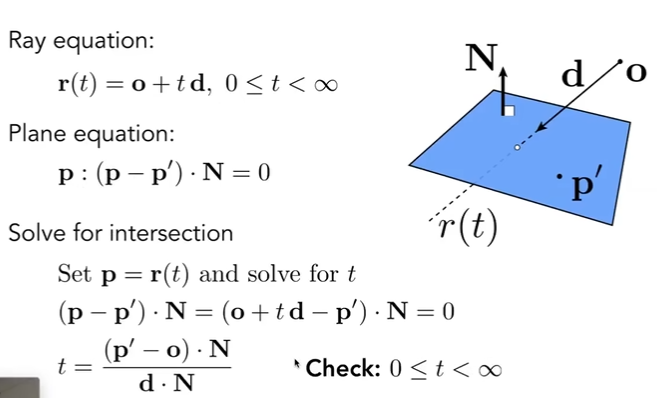
3.1 Ray Equation
光线由起点与方向定义,光线上的任意一点可以使用起点与方向表示。
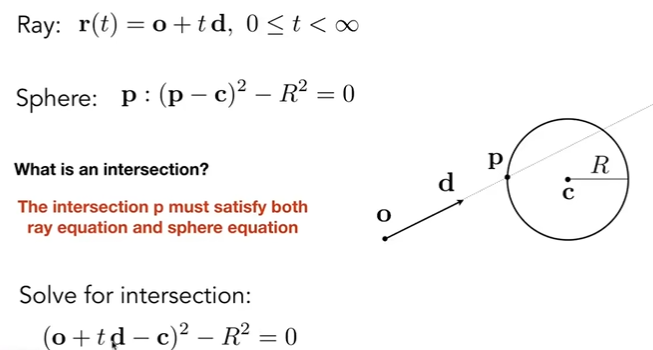
3.2 Ray Intersection With Sphere

3.2 Ray Intersection With Implicit Surface
3.3 Ray Intersection With Triangle Mesh
3.3.1 直接思路
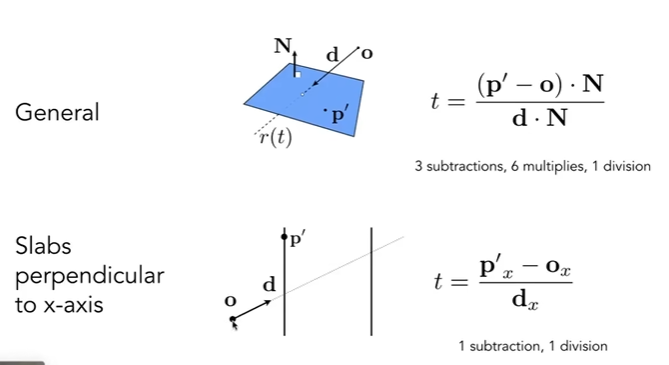
将光线与三角形求交点。将光线与平面求交点,然后判断交点是否在三角形内部。其中后者可用叉积得到。通过给定平面上的一个点以及该平面的法线来定义该平面,即平面内的任意一点与给定点的连线与法线垂直(内积为零),相应的可以写作平面方程。然后利用光线与隐式网格的相交检测方法得到结果。

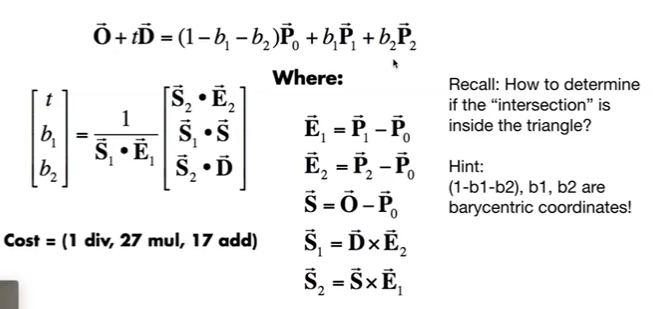
3.3.2 Moller Trumbore Algorithm
使用重心坐标表示三角形平面内的点,形成线性方程组。可以一步得出光线与平面交点。然后判断结论是否合理:b1、b2、t非负(前两者判断在三角形内部,后者是因为光线是射线)。
4. Accelerating Ray-Surface Intersection --Bounding Volumes 包围盒
在三角形表面显式几何中,需要对每一个三角形求解是否相交,需要加速。用某种简单的几何将物体给包围起来,先检测包围盒与光线是否相交,再判断内部物体。
4.1 Ray-Intersection With Axis-Aligned Box
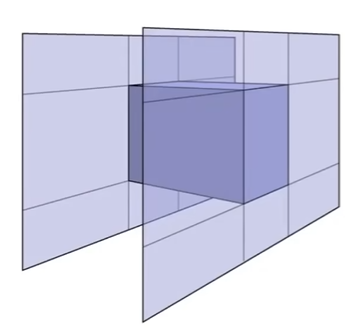
4.1.1 Axis-Aligned Box
长方体是由三个不同的对面slabs形成的交集。通常使用Axis-Aligned Bounding Box(AABB)轴对齐包围盒,即每一对对面都是平行于一个坐标轴面的。
4.1.2 判断条件
以二维为例,分别对两对对面求其进入与出去的时间tmin与tmax,对所有tmin求出最大值即为进入时间,tmax最小值即为出去时间。如果进入时间小于出去时间,那么意味着有一个时间段光线同时处于两对对面的内部,即在盒子内部。
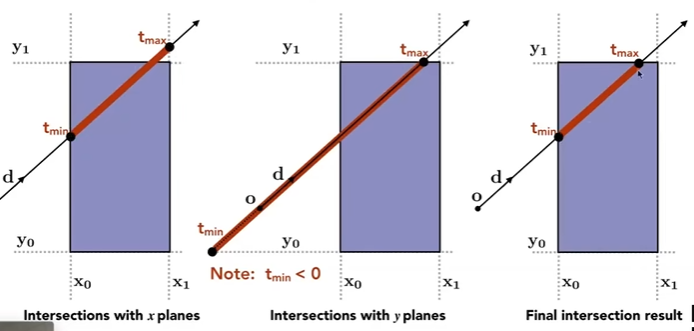
同理,对于3D情况:
- 求三个对面的tmin、tmax;
- 对tmin取最大值为进入时间,对tmax取最小值为出去时间
- 如果tenter<texit则光线进入盒子(直线)

- 如果texit<0,则光源在盒子背面,即反向入射盒子,所以没有与盒子相交
- 如果texit>=0 and tenter<0,则光源在盒子内部
总之,光线进入盒子的条件为:
tenter<texit && texit>0
4.1.3 计算
使用轴向盒子,可以简化计算过程:
4.2 Uniform Grid
4.2.1 Preprocess 预处理
- 找到包围盒
- 对包围盒划分格子Grid
- 找到与物体表面相交的格子

4.2.2Ray-Scene Intersection
- 光线与格子求交,当找到内部有物体的格子时,进行光线与格子内部的物体的相交判断,如果相交则找到一个交点。
- 判断光线与格子的相交,通过光栅化一条线实现。
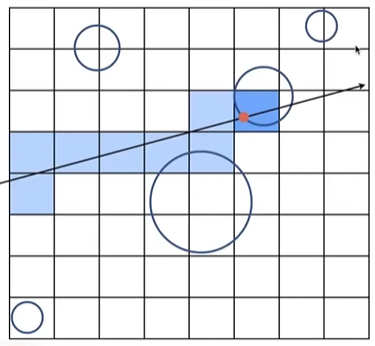
- 在实际中格子的数量是27乘以场景中物体的数量,这是一种尝试的结果来trade off。
4.2.3 缺点
uniform grid方法需要太多的格子,比如在一个大场景中判断一个小的物体。
4.3 Spatial Partitions 空间划分
4.3.1 三种方法
按照空间中物体分布的集中程度来划分格子。
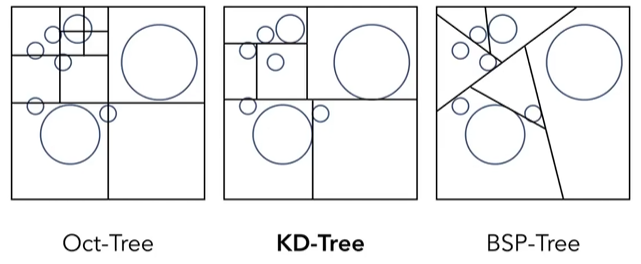
- Oct-tree 八叉树
将一个AABB划分成八分(3D),然后对每份继续八分,直到某个格子内部有足够少的物理就停止它的划分。但是其划分格子数与维度成指数关系。 - KD-tree(三种选择中最优)
每次沿着一个维度切分格子,每次划分的维度交替进行(比如x->y->z)来保证基本是一个近似的方形格子,保障二叉树性质。 - BSP-Tree
每次选择一个方向切分格子,但是不再轴向,而且每次切分都需要一个超平面,没有轴向超平面计算简单。
4.3.2 KD-Tree
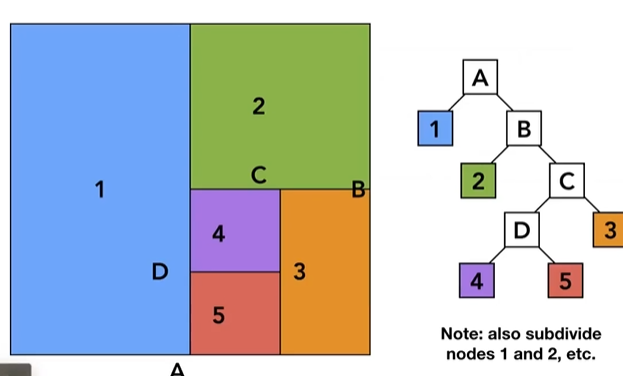
(1) KD-tree的数据结构
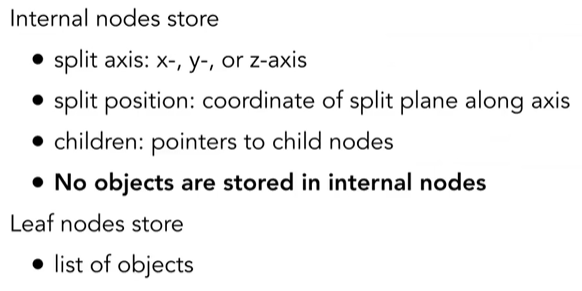
- 每个节点保存切分方向和切分位置,以及子节点
- 在叶子节点中保存物体
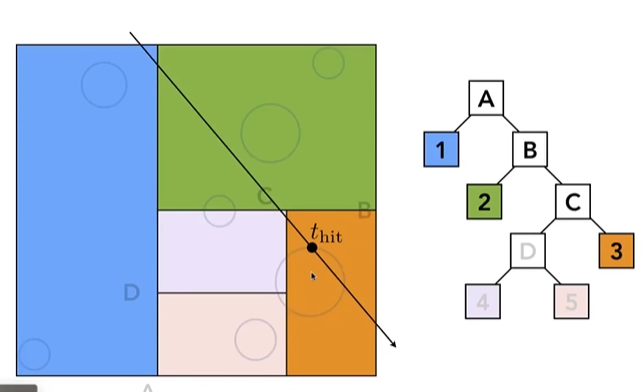
(2) Traversing a KD tree
先判断光线与包围的是否有交点,如果有则判断其与所有子节点是否相交,对于相交的子节点,不断判断相应子节点,直到找到所有的相交的叶子节点,对于找出的叶子节点判断其内部所有物体的交点。
(3) 问题
- 需要判断三角形与AABB的相交关系。
- 此外一个物体可能会被存在不同的格子里面。
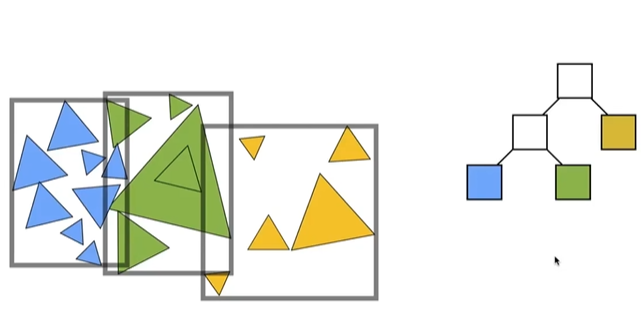
4.4 Object Partitions 物体划分 -- Bounding Volume Hierarchy(BVH)
4.4.1 步骤
按照物体划分网格。将空间中的物体分成两个部分,然后重新计算每个包围盒,如此递归直到包围盒中有足够少的三角形。此外,可以按照KD Tree的思想,按照不同方向交替划分物体来保证格子形状。如此避免了KD Tree的两个问题,但是其boundging box存在相交,比较好的划分方法应当尽可能减少box重叠部分。当场景中的物体改变位置后,需要重新计算。
4.4.2 技巧
- 为了让三角形在空间中均匀分布,每次划分box的最长的轴是一个挺好的选择,比如box是一个长条形。
- 可以按照位于中间位置的三角形的位置来划分位置,可以保证两边box的三角形数量,可以保证tree比较平衡,即减少最大深度。可以按照三角形重心在某个轴方向上排序,但是事实上不需要排序,使用快速选择算法O(N)。
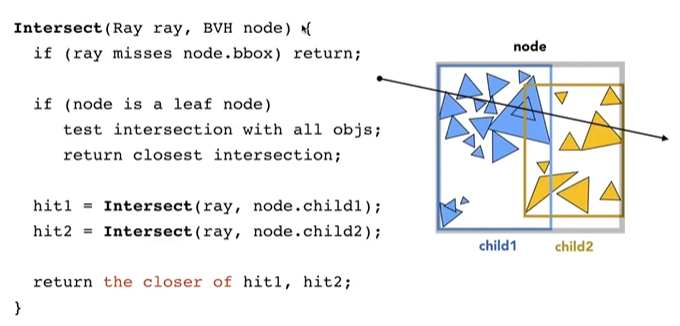
4.4.3 BVH Traversal
类似于KD-Tree,先判断AABB,如果相交且是中间节点,则递归求解子节点,直到找到相交的叶子节点,再判断内部三角形。
来源
[1]Games101. 闫令琪
本文来自博客园,作者:ETHERovo,转载请注明原文链接:https://www.cnblogs.com/etherovo/p/17321726.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号