<一>关于进程虚拟地址空间区域内存划分和布局
程序与进程的区别
程序: 静态 预先编译好的指令和数据的集合 的一个文件 #菜谱
进程: 动态 程序运行的过程 #炒菜的过程
虚拟地址空间: 程序运行后拥有自己独立的虚拟空间
大小: CPU位数决定 指针大小与虚拟地址空间位数相同
32 位平台 *p 32位==4byte 64位 *p 64位 == 8 byte
Windows下可以通过参数将操作系统所占用的空间减少为 1 GB / Boot .ini 加上 /3G 参数
C++代码在编译完成后会生产.exe程序(windows平台), .EXE以文件的形式存储在磁盘上,当运行.exe程序的时候
操作系统会将磁盘上的.exe文件加载到内存中,那么在加载到内存中的时候,操作系统是如何在内存中存放这个exe程序的?
有没有区域的划分?那么是如何划分的?
首先需要了解一点,程序加载到内存中,是不能直接加载到物理内存中的
现在我们以 X86平台的Linux 环境举例
当我们一个程序(进程)在启动执行时,操作系统会为其分配一个4G(2的32次方)的内存空间(就是进程的虚拟内存地址空间)
如下图内存分配图
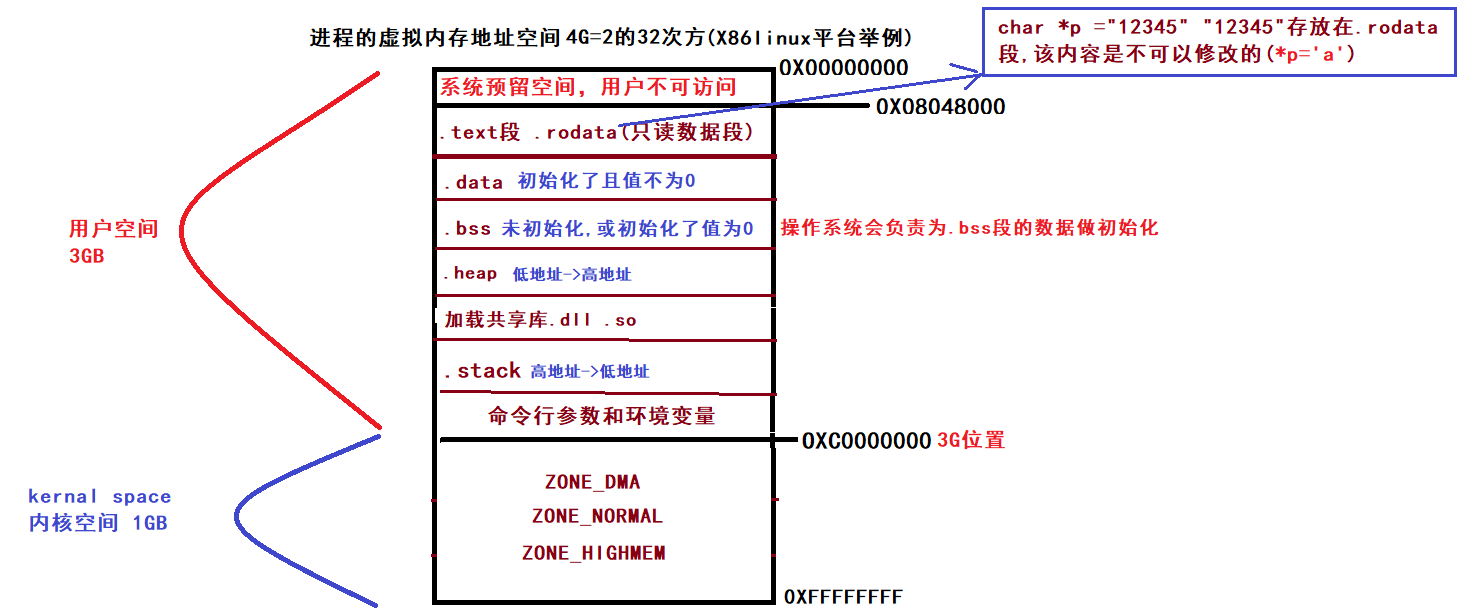
注意:不同的进程之间,用户空间是私有的,内核空间是共享的
栈(stack)
栈又称堆栈,由编译器自动分配释放,行为类似数据结构中的栈(先进后出)。堆栈主要有三个用途:
为函数内部声明的非静态局部变量(C语言中称“自动变量”)提供存储空间。
记录函数调用过程相关的维护性信息,称为栈帧(Stack Frame)或过程活动记录(Procedure Activation Record)。它包括函数返回地址,不适合装入寄存器的函数参数及一些寄存器值的保存。除递归调用外,堆栈并非必需。因为编译时可获知局部变量,参数和返回地址所需空间,并将其分配于BSS段。
临时存储区,用于暂存长算术表达式部分计算结果或alloca()函数分配的栈内内存。
持续地重用栈空间有助于使活跃的栈内存保持在CPU缓存中,从而加速访问。进程中的每个线程都有属于自己的栈。向栈中不断压入数据时,若超出其容量就会耗尽栈对应的内存区域,从而触发一个页错误。此时若栈的大小低于堆栈最大值RLIMIT_STACK(通常是8M),则栈会动态增长,程序继续运行。映射的栈区扩展到所需大小后,不再收缩。
Linux中ulimit -s命令可查看和设置堆栈最大值,当程序使用的堆栈超过该值时, 发生栈溢出(Stack Overflow),程序收到一个段错误(Segmentation Fault)。注意,调高堆栈容量可能会增加内存开销和启动时间。
堆栈既可向下增长(向内存低地址)也可向上增长, 这依赖于具体的实现。本文所述堆栈向下增长。
堆栈的大小在运行时由内核动态调整。
内存映射段(mmap)
此处,内核将硬盘文件的内容直接映射到内存, 任何应用程序都可通过Linux的mmap()系统调用或Windows的CreateFileMapping()/MapViewOfFile()请求这种映射。内存映射是一种方便高效的文件I/O方式, 因而被用于装载动态共享库。用户也可创建匿名内存映射,该映射没有对应的文件, 可用于存放程序数据。在 Linux中,若通过malloc()请求一大块内存,C运行库将创建一个匿名内存映射,而不使用堆内存。”大块” 意味着比阈值 MMAP_THRESHOLD还大,缺省为128KB,可通过mallopt()调整。
该区域用于映射可执行文件用到的动态链接库。在Linux 2.4版本中,若可执行文件依赖共享库,则系统会为这些动态库在从0x40000000开始的地址分配相应空间,并在程序装载时将其载入到该空间。在Linux 2.6内核中,共享库的起始地址被往上移动至更靠近栈区的位置。
从进程地址空间的布局可以看到,在有共享库的情况下,留给堆的可用空间还有两处:一处是从.bss段到0x40000000,约不到1GB的空间;另一处是从共享库到栈之间的空间,约不到2GB。这两块空间大小取决于栈、共享库的大小和数量。这样来看,是否应用程序可申请的最大堆空间只有2GB?事实上,这与Linux内核版本有关。在上面给出的进程地址空间经典布局图中,共享库的装载地址为0x40000000,这实际上是Linux kernel 2.6版本之前的情况了,在2.6版本里,共享库的装载地址已经被挪到靠近栈的位置,即位于0xBFxxxxxx附近,因此,此时的堆范围就不会被共享库分割成2个“碎片”,故kernel 2.6的32位Linux系统中,malloc申请的最大内存理论值在2.9GB左右。
堆(heap)
堆用于存放进程运行时动态分配的内存段,可动态扩张或缩减。堆中内容是匿名的,不能按名字直接访问,只能通过指针间接访问。当进程调用malloc(C)/new(C++)等函数分配内存时,新分配的内存动态添加到堆上(扩张);当调用free(C)/delete(C++)等函数释放内存时,被释放的内存从堆中剔除(缩减) 。
分配的堆内存是经过字节对齐的空间,以适合原子操作。堆管理器通过链表管理每个申请的内存,由于堆申请和释放是无序的,最终会产生内存碎片。堆内存一般由应用程序分配释放,回收的内存可供重新使用。若程序员不释放,程序结束时操作系统可能会自动回收。
堆的末端由break指针标识,当堆管理器需要更多内存时,可通过系统调用brk()和sbrk()来移动break指针以扩张堆,一般由系统自动调用。
使用堆时经常出现两种问题:1) 释放或改写仍在使用的内存(“内存破坏”);2)未释放不再使用的内存(“内存泄漏”)。当释放次数少于申请次数时,可能已造成内存泄漏。泄漏的内存往往比忘记释放的数据结构更大,因为所分配的内存通常会圆整为下个大于申请数量的2的幂次(如申请212B,会圆整为256B)。
注意,堆不同于数据结构中的”堆”,其行为类似链表。
#incclude <iostrea>
using namespace std;
int gdata1=1;
int gdata2=0;
int gdata3;
static int gdata4=10;
static int gdata5=0;
static int gdata6;
int main(){
int a=100;
int b=0;
int c;
static int d=1000;
static int e=0;
static int f;
return 0;
}
如上面代码中的全局变量
gdata1,gdata2,gdata3,gdata4,gdata5,gdata6
无论是普通的还是静态的,他们都叫"数据",每一个数据在编译后,在符号表中都会产生符号.
gdata1和gdata4 初始化了的,而且值部不为0,所以存储在.data段
gdata2和gdata5 初始化了,但是值为0,所以存储在.bss段
gdata3和gdata6 未初始化,存储在.bss段
main 函数中的 a,b,c 不是数据,不会在符号表中产生符号,他们编译只产生指令
例如:mov dword prt[a], och ,他们是存储在.text段,当程序运行到这里时,他们是在栈上分配空间的
对于静态的局部变量 如 d,e,f 也是数据,存放在数据段,也会在符号表中产生符号,
程序启动的时候不会初始化,而是在第一次运行到的时候才会初始化, d存储在.data段,e,f存储在.bss段
打印C的值,是一个栈上的随机值,打印f,由于存储在.bss段,系统会负责为.bss段做初始化,置0,所以打印出来f为0
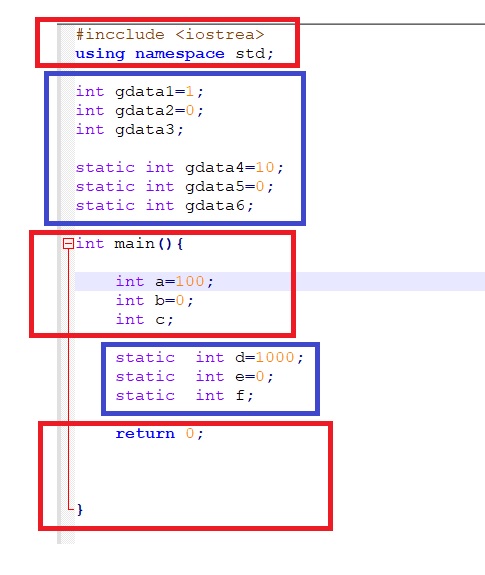
上面红框部分存储在代码段,蓝色框部分存储在数据段
深入理解
每个进程的4G内存空间只是虚拟内存空间,每次访问内存空间的某个地址,都需要把地址翻译为实际物理地址
所有进程共享同一物理内存,每个进程只把自己目前需要的虚拟内存空间映射并存储到物理内存上
进程要知道哪些内存地址上的数据在物理内存上,哪些不在,还有在物理内存上的哪里,需要页表记录
页表的每一个表项分为两部分,第一部分记录此页是否在物理内存上,第二部分记录物理内存的地址
当进程访问某个虚拟地址,去查看页表,如果对应的数据不在物理内存中,,则缺页异常
缺页异常的处理过程,就是把进程需要的数据从磁盘拷贝到物理内存中,如果内存已经满了 ,没有空地方,那就找一个页进行覆盖,当然如果被覆盖的页曾经被修改过,需要将此页写回磁盘

 浙公网安备 33010602011771号
浙公网安备 33010602011771号