
- 反馈网络分析
![]()
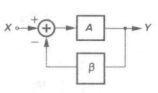
- 网络传输函数:Y/X=A/(1+Aβ)
其中,Y/X为闭环增益,A为开环增益(即前馈网络的增益),Aβ为环路增益(前馈网络与反馈网络直接级联增益) - Y/X=A/(1+Aβ),当βA>>1时,Y/X≈1/β → 系统闭环增益与前馈网络的增益无关,取决于反馈系数。
- 当A很大时,反馈网络也适合用“虚短”进行分析。因为当A很大时,前馈网络的输入相比输出近似为0,即输入信号与反馈信号近似相等,视作短路。
- 频率稳定性分析
设系统的传输函数为![]()
-
系统起振条件(巴克豪森判据):|环路增益|≥1、∠环路增益=-180°
→ 可以看到,能否起振只取决于环路增益βH(s)的幅值与H(s)的相位。所以接下来分析环路增益的幅值与相角。 -
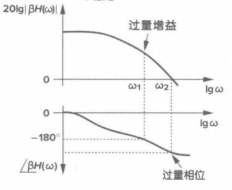
波特图分析
![]()
1)增益交点频率GX:使环路增益等于1的频率
相位交点频率PX:使相位等于-180°的频率
2)在稳定系统中,GX一定小于PX,且GX与环路增益的单位增益带宽相等。
3)波特图零极点规则:(1)在每个零点频率处,幅值曲线的斜率按+20dB/dec变化;在每个极点频率处,其斜率按-20dB/dec变化;(2)对一个ωm的极点(左半平面零点)频率,相位约在0.1ωm的地方开始下降(上升),在ωm处经历-45°(+45°)的变化,在大约10ωm处达到一90°(+90°)的变化。
右半平面零点:
设H(s)=A0(1-s/ωz),则零点位于s=ωz,是一个右半平面的零点。
该系统环路增益βH(s)=βA0(1-s/ωz),|βH(s)|=βA0[1+(ω/ωz)2]0.5,与左半平面零点的幅频特性一致。
∠βH(s)=-arctan(ω/ωz),与左半平面零点的相频特性相反。
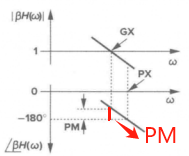
- 相位裕度Phase Margin(PM)PM=180°+∠βH(ω=GX)
![]()
当相位裕度较小时,虽然系统是稳定的,但是在GX附近时,闭环频率响应仍会出现一个尖峰,冲激响应进入减幅震荡。
![]()
可以证明,当PM=60°时,Y(jω)/X(jω)=1/β,表示频率峰可以忽略。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号