SARscape Q&A:干涉叠加处理常见问题
Q. – 使用该模块就能利用数据的全分辨率(Full Resolution)进行处理,这样的说法对吗?
A. – 所有的模块都可以利用数据的全空间分辨率,之所以PS方法得到的形变精度比InSAR高,是因为PS的位移监测(差分相位)目标是稳定的散射体。
Q. – 在处理流程中,有没有对属于同一时间序列的数据,进行过特殊的处理?让其靠近其多普勒质心。
A. – 干涉工作流过程会考虑到数据的多普勒质心,在内插滤波器的设计和通用的方位向带宽滤波执行的时候(如在距离向上的基线去相关或光谱位移处理)。这些滤波步骤可以在默认参数里面选择。需要说明的是,通用的多普勒带宽滤波(Doppler Filter)和光谱位移滤波是不会在PS里面进行的,(默认参数的选项一直是不激活状态),这是因为PS本身算法的原因,PS点没有光谱位移,基线去相关或多普勒带宽的去相关,所以,在距离向和方位向的滤波都是不需要的,而且,如果激活滤波功能的话,可能会使点目标的一些重要信息丢失,同时减少了大基线的主导地位,对估算PS高程的精确估计是有利的。
Q. – 有没有对比过PS和SBAS的处理结果?
A. – 对比过,对日本沉降监测的结果,还采集了实测数据。两种算法的对比结果非常吻合而且和实测数据也是一致的(可以参考PS和SBAS的详细文档对比)。
两种方法的区别有以下几点:
◆ PS (永久散射体) – 通常对于局部目标的形变监测更好
◆ SBAS (短基线) – 形变信息是均匀的,而且可以监测非线性的形变
不过在这里是用了一个PS应用的简单例子,因为:
1、 用到的数据数量比较多,用了34景数据
2、 监测的沉降是在长时间序列上呈线性形变的
3、 在检测区有明显的高相干的散射体
当要监测的情况不满足上面的某个条件时,SBAS方法要更加可靠。
Q.-PS方法监测形变的精度可以达到多高?
A. – 要考虑到图像的个数和形变的速率和PS要求的匹配程度,能达到的精度是:
-能得到小于1厘米/每年的位移速率
-在每个输入的时相相对于参考时相,PS点的相对位移的时期都约是厘米级的。
参考时相,对于假设没有形变“0位移”的参考时相,不一定是在输入面板的“Reference file”里(手动或自动),而是有可能是固定的一个最早的图像,在输入列表(input file list)里面,在相关的面板(default value)里面检查设置。
Q. – 当PS点的密度小于每平方公里100个点的时候,结果的精确度就会有问题,对这种情况下有什么建议?
A. – 当PS点密度低的时候,最重要的问题就是大气干扰的估算和去除,这也是为什么PS方法适合于城市地区,但是在郊外和农村地区,会常常得到错误的结果,这种情况下,我们建议用SBAS方法。
Q. - 我有19个时相的用来做干涉的图,是在略城市化的农村区域,建议用什么方法?
A. – 实际上,当数据量小于最小数据量要求(20景),以及所在的区域可能获取不到足够的PS点的时候,最好的方法是用SBAS方法。不过也可以尝试用PS方法,减少默认的PS点密度,这也是在略城市化的区域一种常见的设置。
Q. – 在线的文件里面提到过,在干涉模块用到的一些干涉处理算法,在干涉叠加模块的常规处理中也用到了,在干涉叠加处理的时候,有没有用到什么特殊的干涉模型方法?
A. – 干涉计算模型,在干涉叠加常规处理中是必须的,执行的时候会自动调用,而PS/SBAS的输出不需要在这个模块调用任何功能。
Q. –在其他默认的面板里面设置的基线阈值的意义是什么?
A. – 默认的阈值(500米)相当于临界基线(用基线估算算出来的临界基线)的5倍,实际上,在干涉处理时和基线相关的约束对分析分布目标是适用的(干涉模块和干涉叠加模块),相反的,如果要分析的是局部/点目标(用PS的方法),那么临界基线就不再有任何限制了。
Q. – 在PS处理时,对相干性阈值的设置或者调整有没有什么特定的标准?
A. – 用默认的设置进行第一次迭代处理之后,看找到的PS点的情况,如果在找到的PS点里面很多可能噪声像素,可以增加相干性阈值,如果找到的PS点太少,可以减少阈值。如果不选择“Generate Slant Range Products”,选择“Generate Geocoded Products”选项的话,第二次的迭代是在生成最终地理编码产品的时候执行的,这种情况下,第一次和最长的一次处理,相干性阈值改变的话,对第一次和时间最长的一次处理,不会有影响,而这两步就跳过了。
Q. –参考数据的选择有什么依据?PS处理中精度估计的结果包含了什么信息?
A. –参考数据是自动选择出来的,是输入数据中平均基线最小的,这就说明这个数据是:
拥有相对于其他数据的完美的空间和时间位置,这有利于图像配准以及所有的处理会变得容易,还有提供较高的相干性(短的基线对大量的去相关是不太敏感的)。选择参考图像的时候,要避免选择大气影响大的图像。
精度估计 "Estimate Precision"功能可以得到对测量精度的估计的初步的结果,对所有时相的数据和所有PS点都是有效的。在PS处理中的精度因子的计算方法和GPS系统的精度因子一样,考虑到时序图像的几何,基线估算和相应的2π高程模糊,还会用到默认的PS点密度。
最后,当PS处理结束后,会计算出每个PS点的实际精度,基于象元相干性和实际的PS密度
Q. -如何知道哪些数据是因为配准失败而被丢弃的?
A. –当配准失败的时候,在输出路径下会生成相应的文件: "coreg_discard.txt",文件中会将由于配准问题而丢弃的数据列出来。
Q. –在PS分析完成之后,有没有哪些软件可以检查的关键要素,确保结果的可靠性?
A. – 其中一项就是检查相关的配准过程:"coreg_discard.txt" 文件包含了那些没有配准的图像。另一项要检查的是大气影响的去除,根据经验来说,对比"_cc_first"(大气影像去除之前)和"_cc"(大气影响去除之后),多时间相干性增加,说明大气校正是成功的。
> 对比前后的cc文件,可以更好的确定如何设置滤波器参数(低通,以米为单位;高通,以天为单位),以避免相干性的损失,来更好的估算形变量。
Q. - SBAS 的首字母分别地表什么?
A. – 代表 “small-baseline subset”,该技术最早起源于:Berardino, Fornaro, Lanari and Sansosti (参看参看文献).
Q. – 在SBAS连接图生成的时候,最大最小的空间和时间基线的确定有什么标准?
A. – 设置最小和最大基线一般是根据数据处理的目的来确定的,看是要用SBAS做形变监测还是提取DEM。如果是要做形变监测,典型的一个设置就是能得到所有的连接图,反之,如果要生成DEM,同样是不连贯的像对可以得到高精度的DEM。
基于上面的叙述,如果在生成DEM的时候选择了“允许不连贯的区域”(Allow Disconnected Blocks),最大最小基线就可以设置为可去除最小像对基线的值,比如临界基线的20%的像对就去除了,这些是对高程测量无用的数据。
另一方面,不管是提取DEM还是测量形变,最好避免选择太大基线的像对,这样的数据相干性很低,这种情况下,空间基线的上限可以设置为临界基线的50%,时间基线的上限也可以参考这样的设置,因为相干性和基线距离是成反比的,影响时间失相干的因素和地表覆盖有关的,如植被、土壤含水量、积雪覆盖等。
在处理中会考虑到这些阈值,在处理过程中是公开的,在干涉生成这一步之后,分析结果以确定在连接表编辑的时候去除哪些像对。
Q. – 在SBAS反演的时候,如何设置大气的低通(Atmosphere Low Pass)和高通(High Pass)滤波参数?
A. – 窗口大小越小,滤波器就越强,滤波器中引进的平滑可以评估,对比"disp_first"中的时间信号(没有进行大气去除的结果)和最终的形变结果。这有助于理解是否大气滤波平滑去除了重要的形变信息。这可以发生在那些大气模式(atmospheric patterns)很少的情况下(如山区范围)因此滤波大小必须要相应的调整,这可以通过在SBAS反算之前观察干涉图评估出来。然而,如果形变模式(displacement patterns)窗口就很小的话(等于或小于大气的),这种情况下不能过分的减少窗口,以防止将形变作为大气信息去除掉了。
Q. –软件如何处理数据集的低相干性的散射区域?
A. – 下图所示的离散分布的相干区域,想监测沉降的区域在右下角,
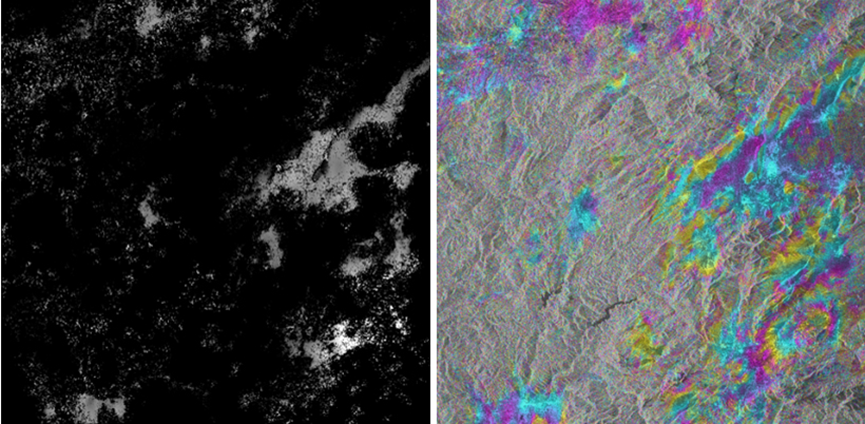
这个区域的相干性比较好,但是周围的低相干区域会影响SBAS的反演和最终的测量精度,如果有足够多的干涉图(理论上至少5景)的话,程序可以用3D解缠的方法重建丢失的信息。.
Q. – 干涉图系列的解缠方法选择的是什么?
A. – 实际上解缠的方法取决于选择的干涉叠加的方法::
◆ 对于PS方法来说,基于经典的文献Ferretti et al,估算形变速率和高程修正量的时候,不会进行解缠处理,因为在时间基线上使用了象元分析的方法,这种方法的优势是对复图像进行分析而不需要相位解缠。
◆在SBAS反演的时候,需要在几种解缠方法中选择: 区域增长法(Region Growing)或最小费用流法(Minimum Cost Flow), 最后一种方法是用直角或不规则的三角形构成的Delaunay网格(Default Values>Interferometry). 如果采用Delaunay方法,可以选择2D或3D(有个时间维度)的解缠。3D解缠会得到更加好的结果在那些不连续的区域,尤其是对低相干的区域,因为它利用了相干性高的干涉图(3维)来估算如何建立新的连接对分散(低相干性)的干涉图,该方法的缺点是会花费更多的处理时间,在SBAS处理过程中,会进行两次解缠,一次是在第一次估计平均位移速率和高程修正之前,另一次是对前一次解缠结果修正的时候。
Q. – 设置分解级别的时候,如何设置最优的级别,有无特定的依据?
A. –这里没有特定的规则,因为该参数的最优设置取决于区域的相干性和解缠的方法。大多数情况下,尤其是选择了默认的方法,分解等级为1是最好的设置。有时候,将等级设置为1(1A – 干涉生成工作流这一步)增加到2(在第一次反算这一步),等级的增加会得到更好的结果。
Q. – SBAS反演之后,一些解缠后的干涉图还是受到地形坡度的影响,这是轨道精炼和重去平的这一步产生的吗?如何处理这种问题?
A. -首先要查看解缠后的数据(_upha_list_meta),在干涉工作流这一步生成的,用来理解GCP应该选在哪里,很差的像对(如相干性很低或很分散,解缠的结果不好)可以用编辑工具移除,在过道精炼和重去平之前,或者是第一步反演之后。
在轨道精炼和重去平处理之后,为了判断GCP的选择是准确的(位置、分布和数量),另一个可视化的方法就是看主要的残余相有无被去除,如果还存在的话,需要更多数量的GCP(大于等于20个点)。
如果选择重去平后的数据,第一步反演将要执行,会生成一组新的解缠数据(存在"_sbas_inversion_dir"路径下,这一步之后,剩下的差的像对在执行第二步反演之前可以去除掉)
程序以这种方式运行,所以即使一些小的残余相位还存在(当然越少越好),对反演的过程没有显著影响。
Q. – 有没有生成轨道GCP文件的简单方法?
A. – GCP点当需要输入"Orbital GCP file"时,该参数是最重要的参数,其选择标准非常重要。在干涉测量模块的QA里面已经提到过了,而在干涉叠加模块这里,需要增加说明的是:该点也会被用到图像和超级主影像配准后生成的相位图再次去平的过程上,一次性找到很好的点是非常困难的,建议的方法是:先找在大多数像对中好的点,可以显示包含所有的像对的meta文件。可以选择残余相位去除(Default Values>Flattening>Refinement and Re-flattening>Refinement Method>Residual Phase),虽然会减小精度,但是对像对的修正是非常有效的方法,还需要考虑有些点在一些像对的范围内,而不在另一些像对的范围内,就要增加点;有时候比如说轨道精度非常精确,看不出来有残余相位的存在,这时候相位偏移是个恒定的量,可以选择简单的方法 Default Values>Flattening>Refinement and Re-flattening>Refinement Method>Residual Phase Poly Degree equal to 1来优化。
无论如何,即使轨道非常精确,都是需要轨道控制点的,用来在重去平的一步进行相位偏移修正 (如恒定相位去除)。
Q. – 对SBAS结果最好的分析方法是什么?
A. – 得到的结果是以meta文件分组存放的 ,为了方便做多时相的时间序列分析。Meta文件可以用任意栅格分析的工具,或者转换成矢量文件后,用矢量数据的分析工具进行分析。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号