SARscape下雷达图像一般处理与应用
SAR系统可以通过多种方式获得图像,如单通道或双通道模式(如HH、HH / HV或VV / VH)、干涉 (单轨或多轨)模式、极化模式(HH,HV,VH,VV)、干涉及极化组合采集模式,不同的获取模式对应了不同的处理方法,可分为以下四种:
-
雷达强度图像处理 -
雷达干涉测量(InSAR/DInSAR) -
极化雷达处理(PolSAR)
-
极化雷达干涉测量(PoIInSAR)
本文介绍的是雷达强度图像的处理。
1 处理流程
如下图是利用SARscape雷达图像基本处理工具,基于不同雷达数据情况,执行雷达图像处理和应用的流程图。
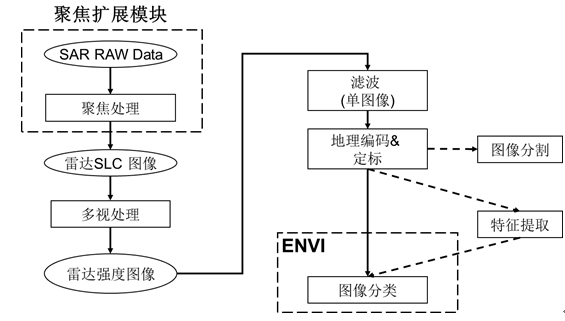
单雷达图像处理与应用流程图
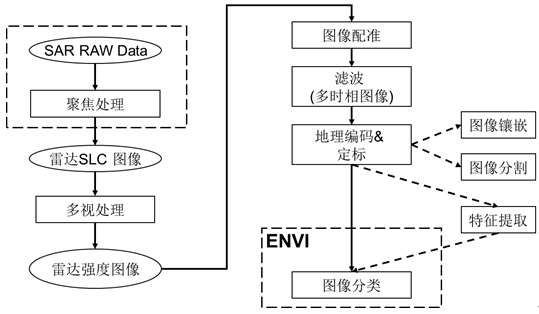
单一传感器,单一模式,多时相雷达图像处理与应用流程图
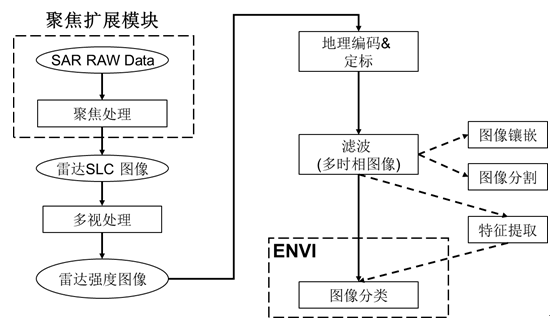
单/多传感器,多模式,多时相雷达图像处理与应用流程图
2 处理流程关键技术
下面介绍流程中相关技术。
(1)
对雷达系统的RAW数据中每个点的反射绿利用经过优化的调焦算法实现数据快速聚焦处理,直接输出单视复数产品数据(SLC数据)。
(2)
为了得到最高空间分辨率的SAR图像,SAR信号处理器使用完整的合成孔径和所有的信号数据,如单视复数(SLC)SAR图像产品,使得SAR图像包含很多的斑点噪声。多视处理的目的是为了抑制SAR图像的斑点噪声。
Multilooking工具支持距离向多视和方位向多视,处理得到的多视强度图像是距离向和/或方位向像元分辨率的平均值。为了提高多视图像的辐射分辨率,降低了空间分辨率。Multilooking工具支持SLC强度数据或距离向强度数据的输入。
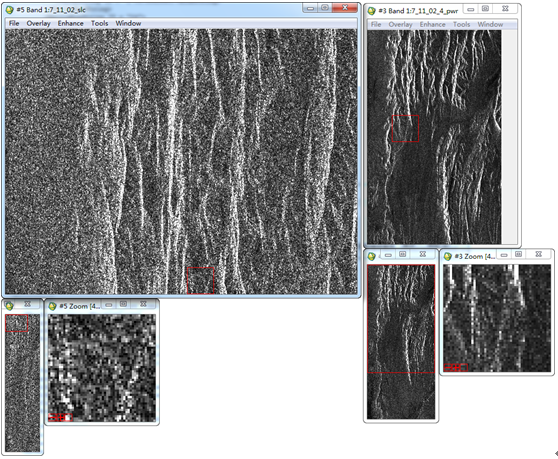
对SLC图像(*_slc)多视处理的结果(右边*_pwr)
(3)
(4)
对于单波段雷达图像,提供的滤波包括:Mean、Median、Mode、EPS、Frost、Lee、Anisotropic Non-Linear Diffusion。
对于多时相雷达图像,提供的滤波包括:De Grandi、Anisotropic Non-Linear Diffusion
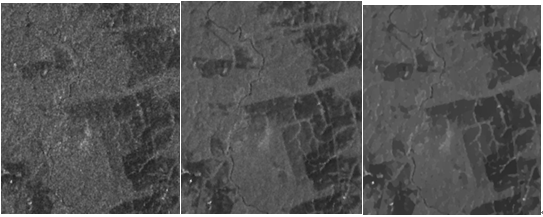
多时相滤波结果(左-原图像,中-De Grandi滤波,右-Anisotropic Non-Linear Diffusion 滤波)
(5)
Feature Extraction工具是基于统计学的理论,能够从SAR图像和InSAR数据中提取不同特征参数,用于图像分割、分类或定量分析等。包括:
(一)
可以计算两个SLC图像的相干性,得到一幅0~1值范围的图像。包括两个处理过程:
- 系统性的空间去相关
- 主图像和从图像之间的时间去相关
得到的相干性产品具有两层应用目的:
- 确定干涉相位的质量,低相干的InSAR像对不能获得可靠的相位测量。
- 提取地面特征属性及其时空变化等相关的专题信息。
(二)
Coefficient of Variation工具可以计算图像变异系数,得到变异系数图像。
(三)
(四)
Multi Temporal Features工具可以对已配准或者地理编码的多时相雷达强度图像进行特征统计,可计算特征包括:均值(Mean)、标准差(Std)、中值(Median)、梯度(Gradient)、最大值(Max)、最小值(Min)、跨度差异(Span Difference)、最大增量(Max Increment)、最大减量(Max Decrement)、跨比(Span Ratio)、最大比率(Max Ratio)、最小比率(Min Ratio)。以图像格式输出
(6)
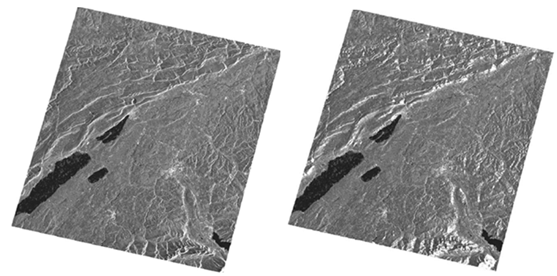
椭球地理编码(左图)和地形地理编码(右图)
在执行地理编码时,还可以选择以下处理功能:
(一)
校正了三种影响因素:散射区域、雷达天线增益和方位向传输损失。
可选择三种定标输出结果:后向散射系数(Sigma),归一化后向散射系数(Gamma),雷达亮度或者反射值(Beta)。
(二)
提供两种方法:余弦校正或半经验修正法(Semi-empirical)。
(三)
(四)
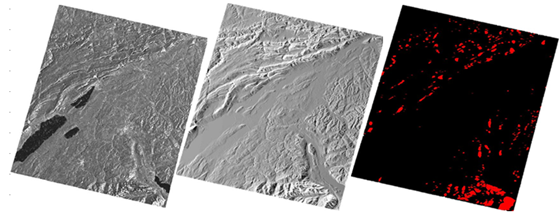
图像定标结果(左-后向散射系数,中-局部入射角地图,右-叠掩/阴影地图)
提供地理编码雷达影像逆转换其他格式的工具,包括转成距离/地面影像、距离/地面点和距离/地面矢量。
(7)
提供后向散射系数后处理Post Calibration工具,减少水分、表面特征等干扰介电常数而产生对后向散射系数的影响。
提供三种校正:
(一)
(二)
以一个或者多个参考影像校正由于时相造成介电常数的失真。计算得到的介电常数校正系数还可用于定性湿度指标。
(三)
对多时相的数据集统计的基础上得到校正系数(二维图像)。
以上三种辐射校正方法可以独立运行或者组合方法运行。
(8)
可以将覆盖相同区域的多幅雷达影像拼接成一幅,也支持干涉产品的镶嵌(如DEM、地表形变图等)。提供两种方法:
(一)
(二)
适用于需要在重叠区绘制切割线的镶嵌。切割线是基于边缘检测技术自动生成,

1250幅JERS-1 SAR图像镶嵌结果
(9)
支持雷达或者光学的分割,分为四步:各向异性非线性扩散滤波、边缘检测、区域合并、区域地图生成。
(一)
采用Canny边缘检测算法,Canny算法不需要依赖区域分布的先验统计,而是直接基于结构分析进行轮廓检验,支持单个和多个图像文件。
(二)
采用基于假设编码结构的方法,该方法是将图像分解成同质“片段”,之后分别对闭合区域进行编码。从边缘检测图像中定义的闭合区域与同质“片段”相匹配。
(三)
(四)
可以探测多个图像文件之间的变化。
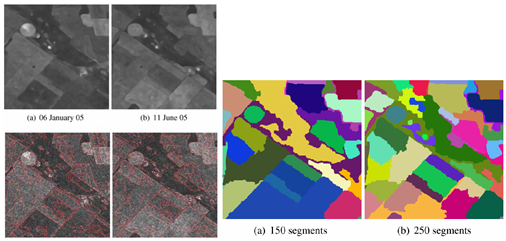
不同时相雷达图像的分割结果
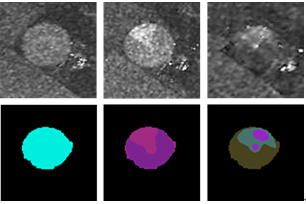
时变分割用于检测变化信息
3 典型应用
(1)
数据为ENVISAT 的ASAR雷达数据,覆盖区域为孟加拉国。原始数据参数如下:
-
ASA_WSM_1P level 1b -
Wide Swath Standard Image -
(multi-look ground range) -
Descending orbit -
HH polarization -
Incidence angle ~ 30.95 ° -
Nominal resolution
-
Nominal pixel spacing
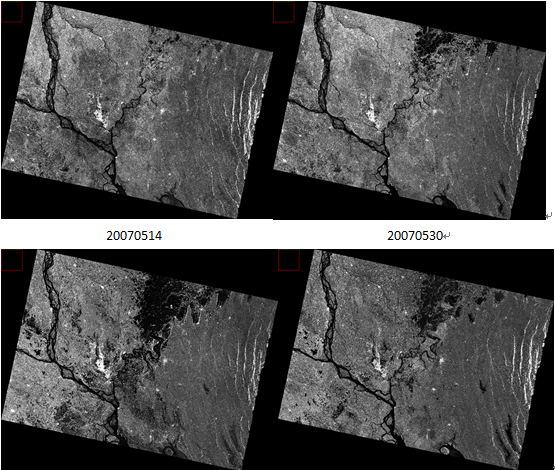
四个时间拍摄的SAR图像,已经经过的地理编码等预处理
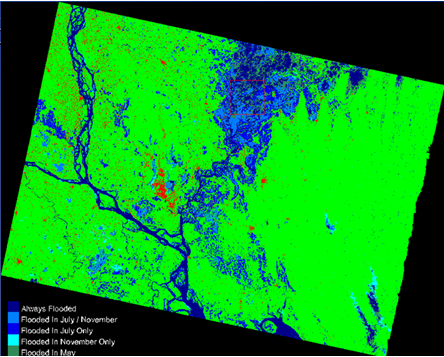
从不同时期影像上获取的水淹没信息
(2)
雷达图像的后向散射系数产品可以反映土壤粗糙度和水分含量,以及土壤其他性质,可以识别土壤属性信息(如犁地,播种,和作物生长等)。
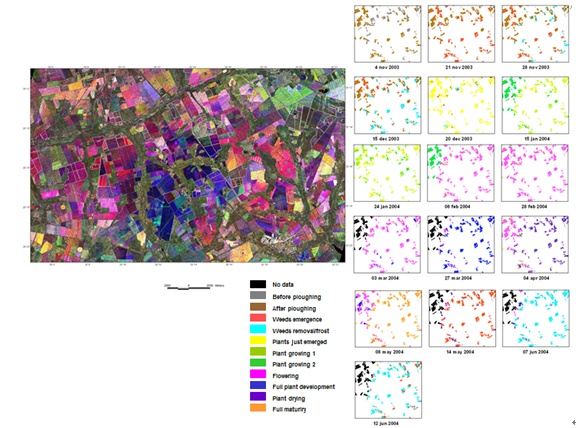
利用雷达图像监测不同时间内玉米种植
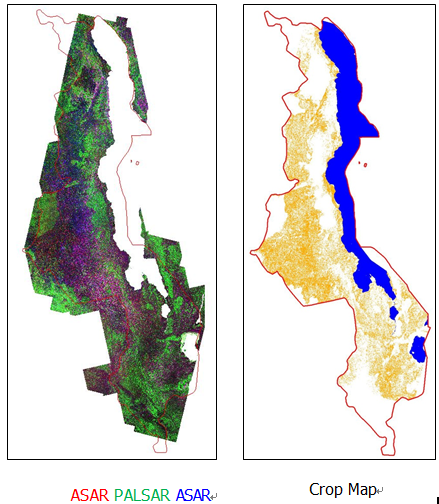
利用ASAR和PALSAR数据监测作物信息

 浙公网安备 33010602011771号
浙公网安备 33010602011771号