Sobel算子 Scharr算子 Laplacian算子
 要是觉得内容枯燥,您可以点击左下角的播放按钮,让您在音乐的熏陶下愉快的阅读
要是觉得内容枯燥,您可以点击左下角的播放按钮,让您在音乐的熏陶下愉快的阅读
 本文总字数:2025
本文总字数:2025
图像梯度处理
-
Sobel算子

水平方向:
-
对于线条A和线条B,右侧像素值与左侧像素值的差值不为零,因此是边界
上下像素值差值为0,左右素值的差值不为零,分布为正负,
离的近的为2,离的远的为1
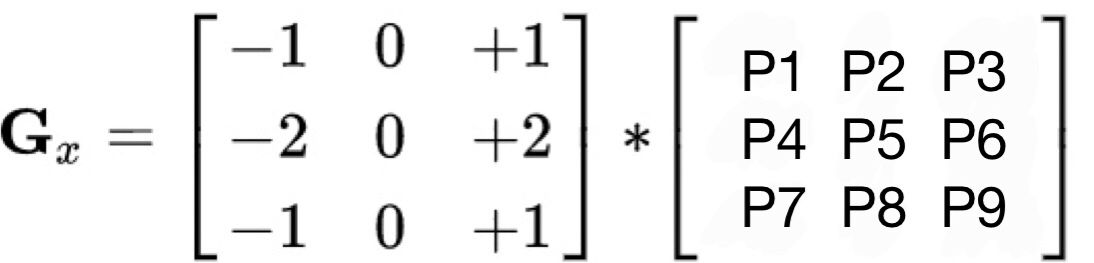
P5=(P3-P1)+2(P6-P4)+(P9-P7)
竖直方向:
-
对于线条A和线条B,上侧像素值与下侧像素值的差值不为零,因此是边界
左右像素值差值为0,上下素值的差值不为零,分布为正负,
离的近的为2,离的远的为1

P5=(P7-P1)+2(P8-P2)+(P9-P3)
在使用时,P5可能是负数,所以要取绝对值!
cv2.Sobel( src, depth, dx, dy[, ksize[, scale[, delta[, borderType]]]] )
-
src表示输入图像
-
depth表示输出图像的深度
-
dx表示x轴方向的求导阶数
-
dy表示y轴方向的求导阶数
- 注意要分别算x,y轴,不能同时算。同时算不准确
-
ksize表示Sobel核的大小
-
scale表示计算导数值所采用的缩放因子,默认值是1
-
delta表示加在输出图像的值,默认值是0
-
borderType表示边界样式

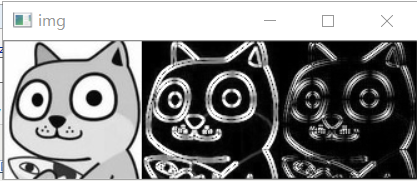
img = cv2.imread('1.jpg',cv2.IMREAD_GRAYSCALE) #x轴方向的求导阶数 soblex = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3) #取绝对值 soblex = cv2.convertScaleAbs(soblex) #x轴方向的求导阶数 sobley = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3) sobley = cv2.convertScaleAbs(sobley) #x,y轴综合 soblexy = cv2.addWeighted(soblex,0.5,sobley,0.5,0) #对比,xy同时算 soblexy2 = cv2.Sobel(img,cv2.CV_64F,1,1,ksize=3) soblexy2 = cv2.convertScaleAbs(soblexy2) res = np.hstack((img,soblexy,soblexy2)) cv_show('img',res)
-
Scharr算子
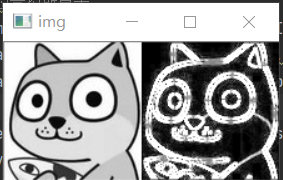
Scharr算子和Sobel算子具有同样速度且精度更高。当Sobel核结构不大时,精度不高,Scharr算子具有更高的精度,Scharr算子是Sobel算子的改进。

img = cv2.imread('1.jpg',cv2.IMREAD_GRAYSCALE) scharrx = cv2.Scharr(img,cv2.CV_64F,1,0) scharrx = cv2.convertScaleAbs(scharrx) scharry = cv2.Scharr(img,cv2.CV_64F,0,1) scharry = cv2.convertScaleAbs(scharry) scharrxy = cv2.addWeighted(scharrx,0.5,scharry,0.5,0) res = np.hstack((img,scharrxy)) cv_show('img',res)
-
Laplacian算子
Laplacian(拉普拉斯)算子是二阶导数算子,具有旋转不变性,没有边缘的方向信息,双倍加强噪声对图像的影响。通常情况下,Laplacian算子的系数之和为零。
Laplacian算子对噪音点敏感!
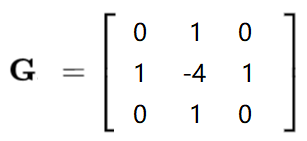
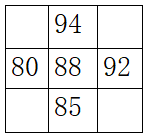

•非边界(梯度小,边缘不明显)
P5=(94+80+92+85)-4x88=-1
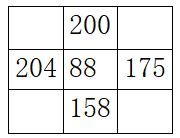
•边界(梯度大,边缘明显)
P5=(200+204+175+158)-4x88=385
P5=(20+24+17+15)-4x88=-276
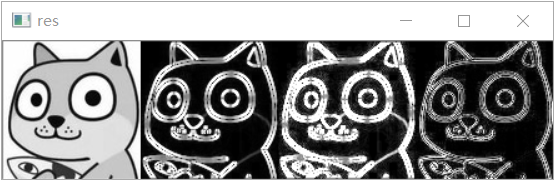
img = cv2.imread('1.jpg',cv2.IMREAD_GRAYSCALE) laplacian = cv2.Laplacian(img,cv2.CV_64F) laplacian = cv2.convertScaleAbs(laplacian) res = np.hstack((img,laplacian)) cv_show('res',res)

- Sobel算子 Scharr算子 Laplacian算子对比


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· AI与.NET技术实操系列:基于图像分类模型对图像进行分类
· go语言实现终端里的倒计时
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 分享一个免费、快速、无限量使用的满血 DeepSeek R1 模型,支持深度思考和联网搜索!
· 基于 Docker 搭建 FRP 内网穿透开源项目(很简单哒)
· ollama系列01:轻松3步本地部署deepseek,普通电脑可用
· 25岁的心里话
· 按钮权限的设计及实现