OpenCv基础_四
Harris角点检测
- 理解
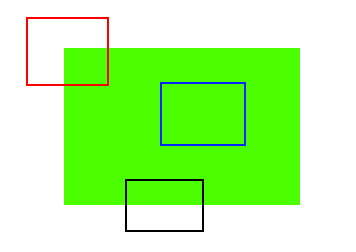
内部点:蓝框所示,无论滑动窗口水平滑动还是竖直滑动,框内像素值都不会发生大的变化
边界点:黑框所示,滑动窗口沿着某一个方向滑动框内像素点不会发生大的改变,但是沿着另一个方向滑动,就会发生大的改变
角点:红框所示,滑动窗口沿着两个方向滑动,框内像素点都会发生大的变化
两个方向上的特性值分别为λ1,λ2,
当 λ1,λ2,都很小, |R|也很小时,表示是内部区域
当 λ1,λ2,一个大一个小,R<0时,表示是边界区域
当 λ1,λ2,都很大,R也很大时,表示是角点
- 函数
Open 中的函数 cv2.cornerHarris() 可以用来进行角点检测
参数
• img - 数据类型为 float32 的输入图像。
• blockSize - 角点检测中要考虑的领域大小。
• ksize - Sobel 求导中使用的窗口大小
• k - Harris 角点检测方程中的自由参数,取值参数为 [0,04,0.06].返回值
R值构成的灰度图像,灰度图像坐标会与原图像对应,R值就是角点分数当R值很大的时候 就可以认为这个点是一个角点
- 步骤
1.图片转化为灰度图
2. cv2.cornerHarris() 处理的是float32,注意类型转换
3.利用 cv2.cornerHarris()得到R集合
4.把R中大于某个阈值的判定为角点,
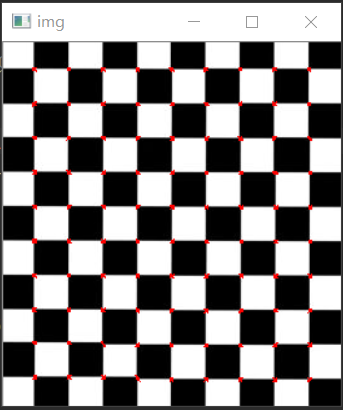
img[dst>0.01*dst.max()] = [0,0,255]
这里R矩阵是一个很大的值,取里面最大的R,只要dst里面的值大于0.01R的最大值
那么此时这个dst的R值也是很大的 可以判定他为角点
import cv2 import numpy as np def cv_show(name,img): cv2.imshow(name,img) cv2.waitKey(0) cv2.destroyAllWindows() img = cv2.imread('chess.jpg') gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) gray = np.float32(gray) dst = cv2.cornerHarris(gray,2,3,0.04) img[dst>0.01*dst.max()] = [0,0,255] cv_show('img',img)