分布式快照算法—— Chandy-Lamport 算法的证明
状态和事件的定义:
对于分布式流处理系统,我们可以将数据处理流程抽象化为DAG(V,E),其中V表示逻辑的处理进程p,E表示进程之间通信的c。
C的状态是沿C发送的消息序列,不包括沿C接收的消息。P的状态是各种参数的值。
流程由一组状态,一个初始状态(来自此组)和一组事件定义(全局状态转换图)。进程p中的事件e是一种原子动作,它可以改变p本身的状态以及最多一个与p进行通信的通道c的状态:c的状态可以通过沿c的发送消息来改变(如果c中的消息由p发出)或沿c接收消息(如果c中的消息是发给p的)。事件e的定义是:(1)事件发生的进程p;(2)事件发生之前p的状态s;(3)事件发生之后p的状态s';(4)通道c(如果有的话),其状态因事件而改变;以及(5)消息M(如果有的话)沿着c发送或沿着c接收 。我们用5元组(p,s,s’,M,c)定义e,如果e的出现不会改变任何通道的状态,则M和c是特殊符号nul。
分布式系统的全局状态是一组进程和通道的状态:对于初始全局状态,每个进程状态是其初始状态,每个通道的状态为空序列。事件的发生可能会更改全局状态。令事件e =(p,s,s',M,c)我们说e可以在全局状态S下发生,当且仅当(1)全局状态S下的过程p的状态为s且(2)如果c为指向p的信道,则全局状态S中的c状态是一个消息序列,其头部为M。我们定义一个next函数,其中next(S,e)是在全局状态S中事件e刚发生之后的全局状态。仅当事件e可以在全局状态S中发生时,next(S,e)的值才被定义。 ,在这种情况下,next(S,e)是与S相同的全局状态,除了:(1)next(S,e)中p的状态为s'; (2)如果c是指向p的信道,则next(S,e)中c的状态是S中c将头部的M删除后的状态; (3)如果c是指离p的信道,则next(S,e)中c的状态与S中的c将M添加到c的尾部后的状态。
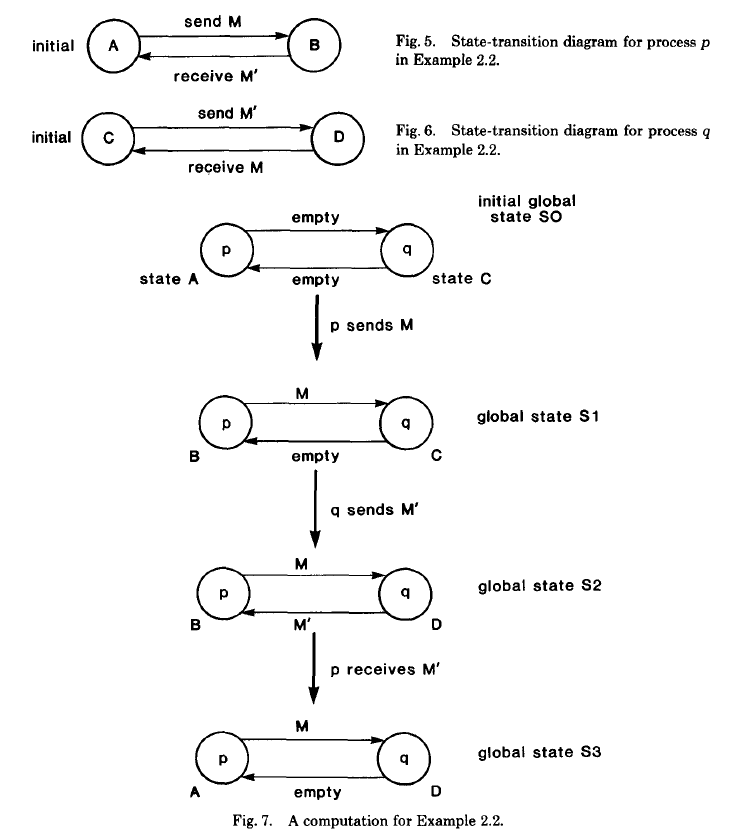
一个简单的例子:
算法:
Motivation for The Steps of the Algorithm
将状态的记录者分为三个角色:
消息的发送者;
消息通道(单向);
消息的接收者;
消息的发送者同时也可以是消息的接收者,实际过程中消息通道也可能是双向的,都不响应算法描述。接下来原文通过对模型篇中描述的两个模型进行案例分析, 讲了两个道理:
发送者record状态时,已发送的消息数 = channel Record时已经接收消息数。道理不难,场景:A村上午09:00找个拖拉机把大米拉到B存去。
假设1:8:50时,拖拉机司机在小本本上写了一句:“车上没米”;9:01分大米上车,然后A村在自己的小本本上记录了“米已经送离我村”。将两个小本本合起来一看,MD,大米呢。很显然,大米送上车后,拖拉机上的小本本必须得更新了。
同理,A村如果08:59分记小本本,拖拉机09:01分记小本本,就会出现两个小本本上都写着此处有大米了。
同理,接收者record状态时,已经接收的消息数 = channel Record状态时已经被消费的消息数。
Global-State-Detection Algorithm Outline
直接给出了一个满足上述条件的算法。有一个重要的前提,大家Record状态的时机是自发的、随机的。具体方式是:
对发送者p:在p记录状态后,发送其他消息前,发送一个marker;
对于接收者q,在其接收到marker时:
如果q未record状态,就记录当前状态,记录channel的状态为空;
如果q已经record了状态,就记录channel的状为当前收到的数据 - q record时已经收到的数据。嘛意思?可以理解为q Record时channel状态的补充记录。
初次看原文的时候,其实觉得这个结论来的有点懵,后来又觉得没毛病:
Channel本身是没有程序载体的,也就是说它不可能记录自己的状态;
谁能轻松的、准确的 Record Channel的状态呢?必然是接收者,如果用发送者,还得有个机制知道下游消费到哪了不是?这种机制一般还会耦合业务。
用Marker来协调发送者和接收者,是利用了发送者和接收者之前必然存在的因果关系,只有数据发送了,接收者才能收到,并且保序。
Channel状态记录的时机虽然是随机的,但是可以通过Marker收到后进行补充,达到满足前一节的两个相等条件。
并不是Record后全局状态就形成了,然是要marker消息走完数据处理全链路之后才会形成。
Termination of Algorithm
为了确保全局状态记录算法在有限时间内终止,每个进程必须确保(L1)没有标记永久保留在发送通道中,并且(L2)在算法启动的有限时间内记录其状态。
如果对于每个进程q:q可以自发记录其状态,或者存在从进程p(自发记录其状态)到q的路径,则可以确保在有限时间内终止。
How to get the global state:
我们将分布式状态记录为S*将seq(ei)定义为一组事件,将Si定义为在ei发生之前的全局状态,那么我们假设分布式状态记录从Sl开始,结束于St,那么对于seq(ei)的子序列seq’(ej),其中t>j>=l,存在一个seq’’(ek),使得seq’’(ek)是seq’(ej)的子序列,且存在某一个t=>k>=l,使得Sk=S*。
我们将seq’(ej)中的事件分为两类,对于事件e和他所属的进程p,如果事件e发生在p记录自己状态之前,我们称e为前事件,否则我们称e为后事件。我们可以发现如果ej-1为后事件且属于进程p,而ej为前事件且属于进程q,那么事件ej-1和ej不可能对应于这样的一个事件组,即从消息从p发出然后由q接收。假设成立,那么p在记录自己的状态后会发送mark,然后发送消息M,这时q会先收到mark然后再收到M,这意味着ej是一个后事件。
这样,对于所有这样的ej和ej-1,他们之间不存在有序的关系,即我们将这两个事件的发生顺序交换后,Sj+1不会受到任何的影响。这样,我们将seq’(ej)中所有的前事件移动到事件队列seq的前部分(你可以想象是赋予所有的前事件1,赋予所有的后事件0,然后冒泡排序)。
假设最后一个前事件为ek,那么我们可以证明S*=Sk+1。
要证明上述的结论必须要证明:
(1) 经过seq(ei……ek)之后得到能得到S*中所有进程的状态,这是显而易见的,因为所有进程记录状态的时间都在“后事件”之前,而这些后事件我们还没有执行。
(2) S *中每个通道c的状态为(所有前事件中发送到c的消息)-(所有前事件中从c接收的消息)。我们从两个方面来看c的状态,一方面,我们记录的局部的c的状态是p记录自己状态后到q收到mark之前的所有消息,也就是说,p已经发送的认为q应该处理完的消息减去q实际上处理完了的消息;另一方面(所有前事件中发送到c的消息)-(所有前事件中从c接收的消息)=p发送mark之前已经发送的-q记录state之前已经接收的(因为后面的事件都是在记录状态之后发生的,不会对接收数目产生影响)。这个值就表明了p以为q已经处理了的和q实际上已经处理了的消息数目之差。
这样我们通过重新的排列seq’(ei)中的事件的顺序可以得到从初始状态Sl->S*->St的一个状态转移序列,由于我们已经知道了S*(分布式全局状态),我们只需要记录那些后事件,然后在S*的基础上演绎这些事件就可以得到St,即全局的状态。
看了一天大概就是这个样子吧,这是我的个人理解,如果想看最透彻的解读推荐看一下论文:https://lamport.azurewebsites.net/pubs/chandy.pdf

 浙公网安备 33010602011771号
浙公网安备 33010602011771号