


(转)Boost的状态机库教程(2)
1 基础主题:秒表
下面我们要为一个机械秒表建模一个状态机。这样一个秒表通常会有两个按钮。
* Start/Stop
* Reset
同时有两种状态:
* Stoped: 表针停留在上次停止时的位置:
o 按下Reset按钮,表针回退到0的位置。秒表保持在Stoped状态不变。
o 按下Start/Stop按钮,秒表转到Running状态。
* Running: 表针在移动,并持续显示过去的时间:
o 按下Reset按钮,表针回退到0的位置,秒表转到停止状态。
o 按下Start/Stop按钮,转到Stoped状态。
下面是其UML图: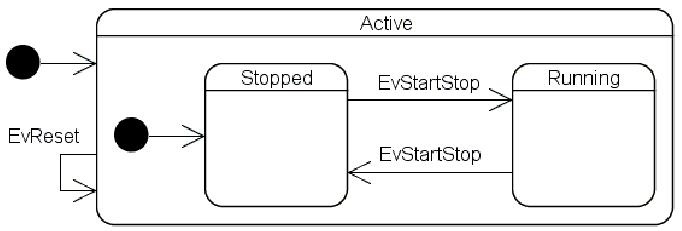
1.1 定义状态和事件
两个按钮可以建模为两个事件。进而,定义出必要的状态和初始状态。我们从下面的代码开始,以前的代码片段会陆续加入其中:
#include <boost/statechart/event.hpp>
#include <boost/statechart/state_machine.hpp>
#include <boost/statechart/simple_state.hpp>
namespace sc = boost::statechart;
struct EvStartStop : sc::event< EvStartStop > {};
struct EvReset : sc::event< EvReset > {};
struct Active;
struct StopWatch : sc::state_machine< StopWatch, Active > {};
struct Stopped;
// 这里的simple_state类模板可以接受4个参数:
// - 第3个参数指定内部的初始状态,如果有一个这样的状态的话。
// 在这里,Active有一个内部状态(Stoped), 所以将这个内部
// 初始状态传给它的基类。
// - 第4个参数指定是否保留和保留什么类型历史
// Active是最外层的状态,因此要把它所属的状态机类传给它
struct Active : sc::simple_state<
Active, StopWatch, Stopped > {};
// Stopped 和 Running 都把Active作为它们的上下文,这使他们嵌入到了Active状态中。
struct Running : sc::simple_state< Running, Active > {};
struct Stopped : sc::simple_state< Stopped, Active > {};
// 因为状态的上下文必须是一个完整的类型(不能单单是声明),
// 所以状态机必须要在“外层状态”之间先定义。
// 也就是说,我们需要从状态机开始,然后是最外层的状态,然后是其内部的状态,如此反复。
// 我们可以用广度或深度方式,再或是以两都混合的方式来进行定义。
int main()
{
StopWatch myWatch;
myWatch.initiate();
return 0;
}
这个代码已经可以编译了,但不会发生任何可察觉的事件。
