
UPenn - Robotics 3:Robotics: Mobility - week 2:Behavioral (Templates) & Physical (Bodies)

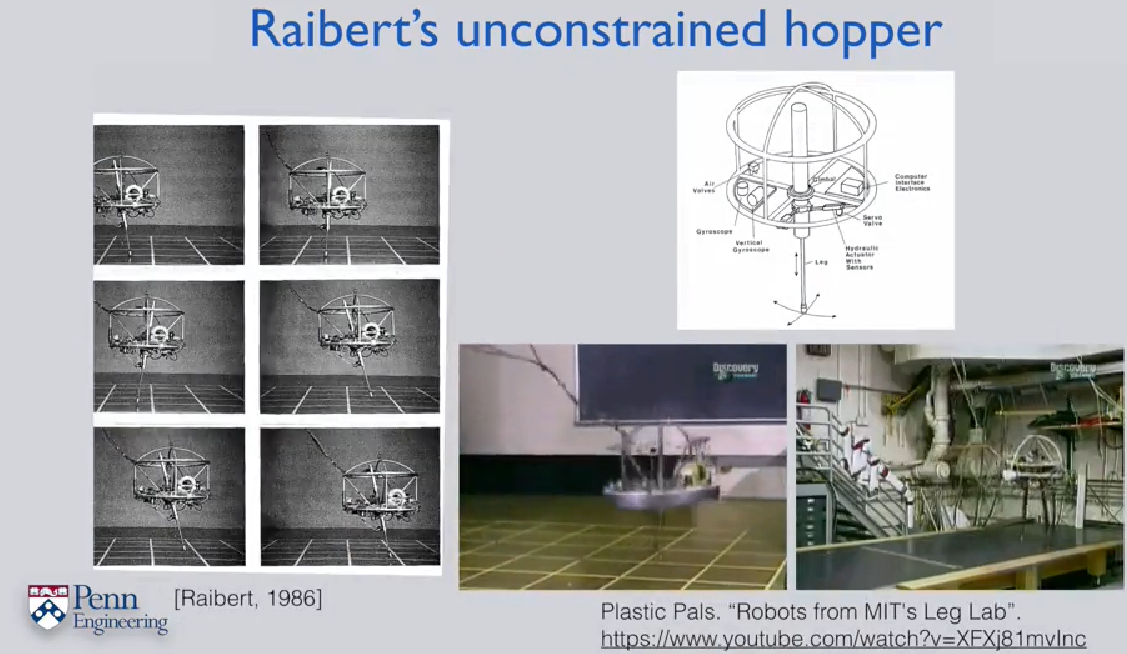
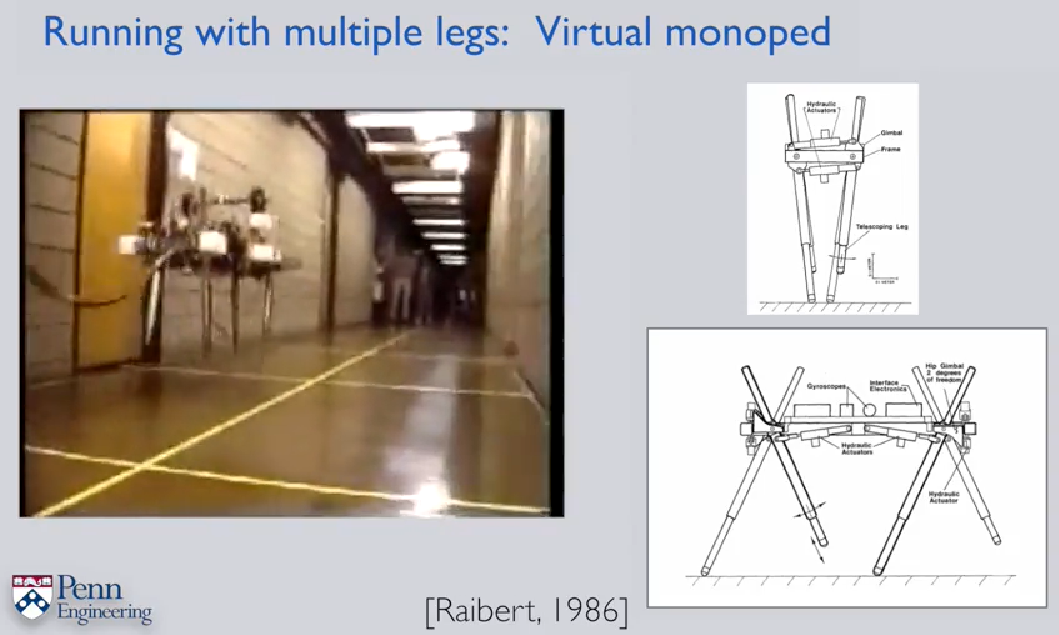
1983 mit

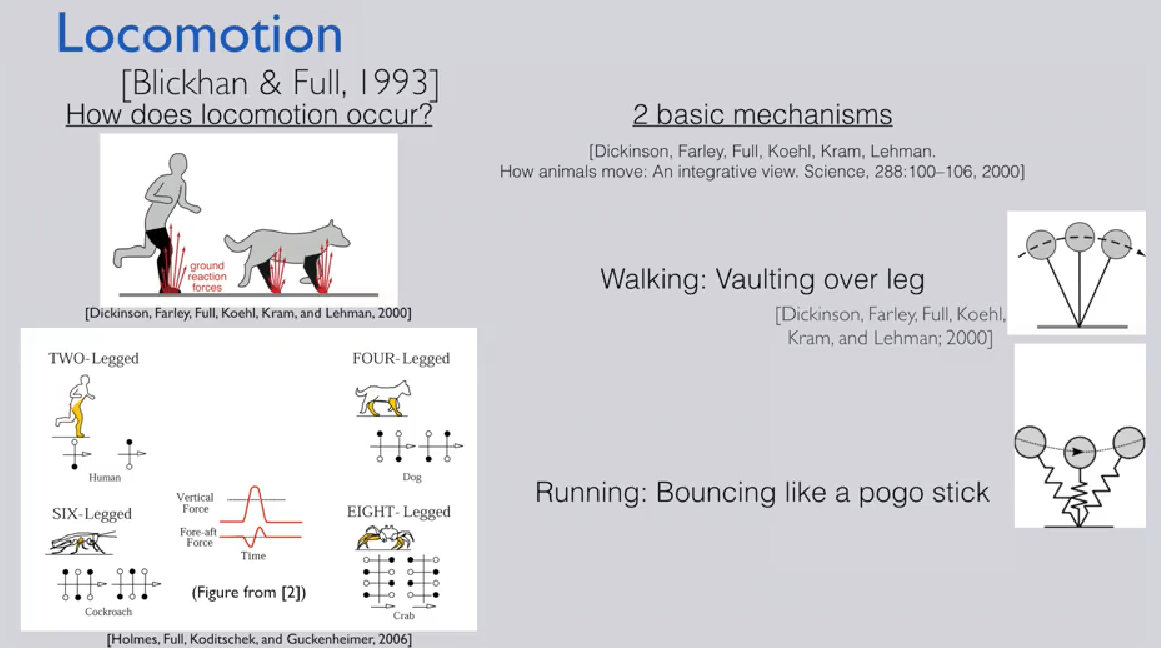
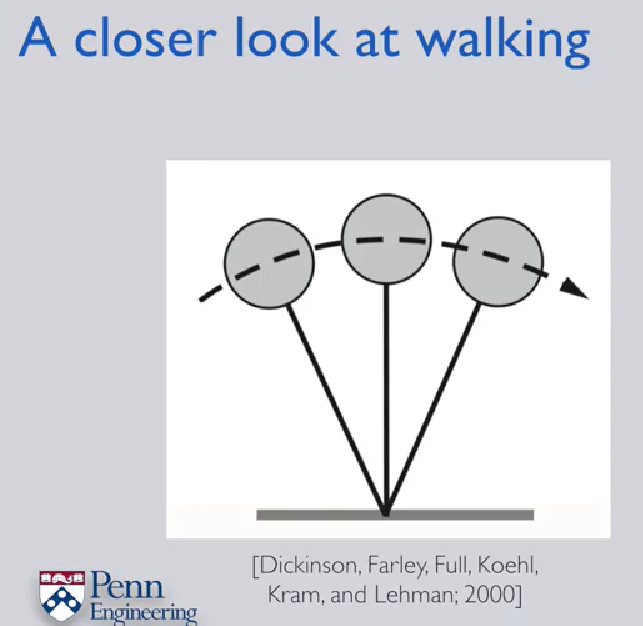
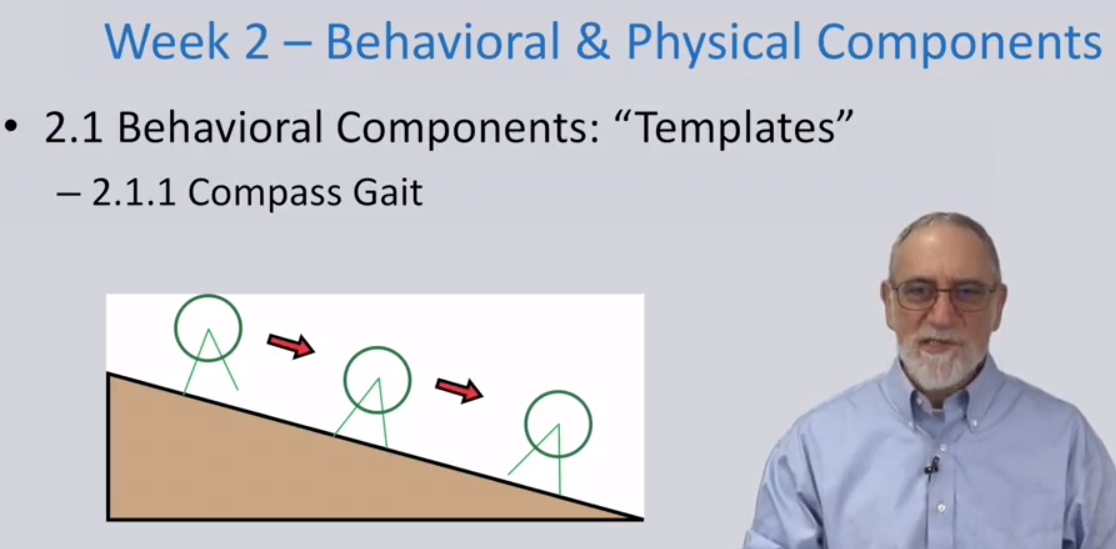
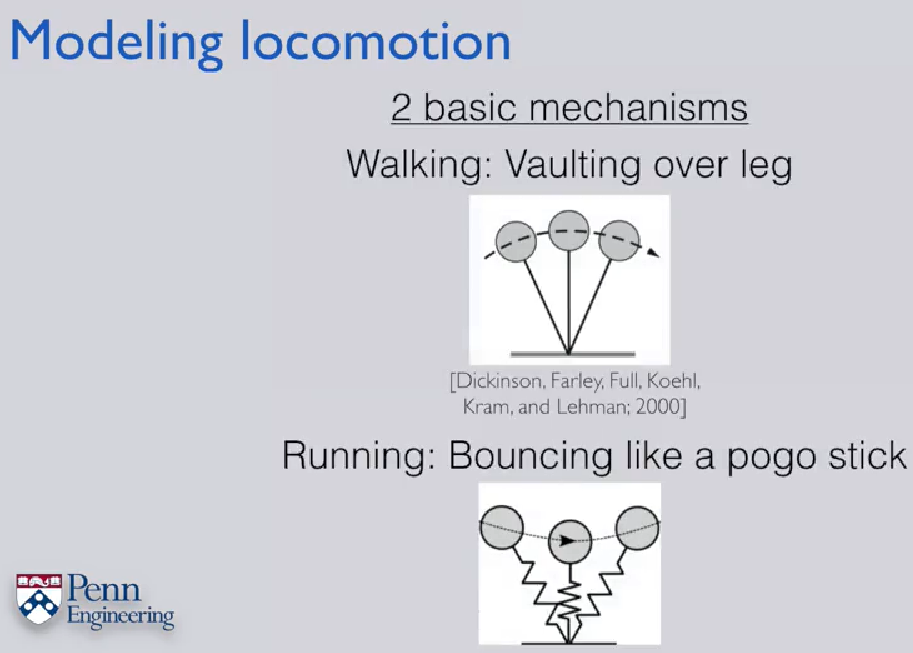
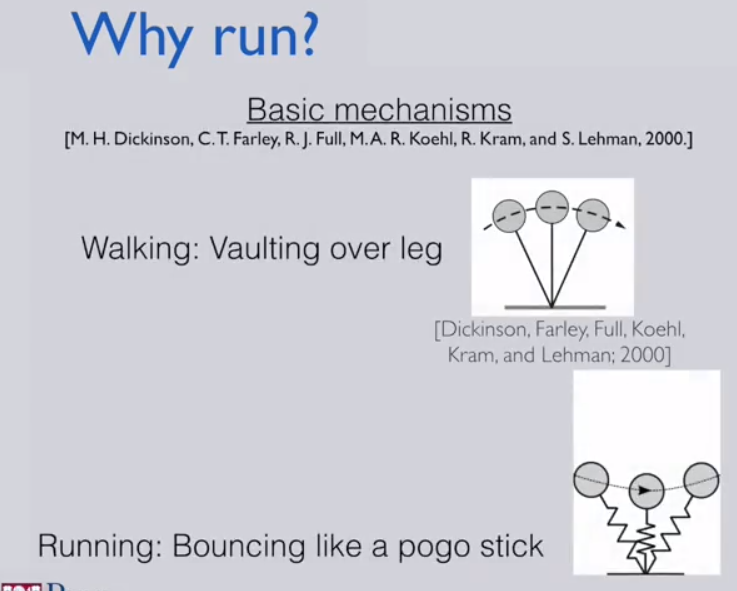
 quasi-static walking
quasi-static walking



the above examples are with almost no control in computer level!!!!!!!!




 climb-up robot
climb-up robot











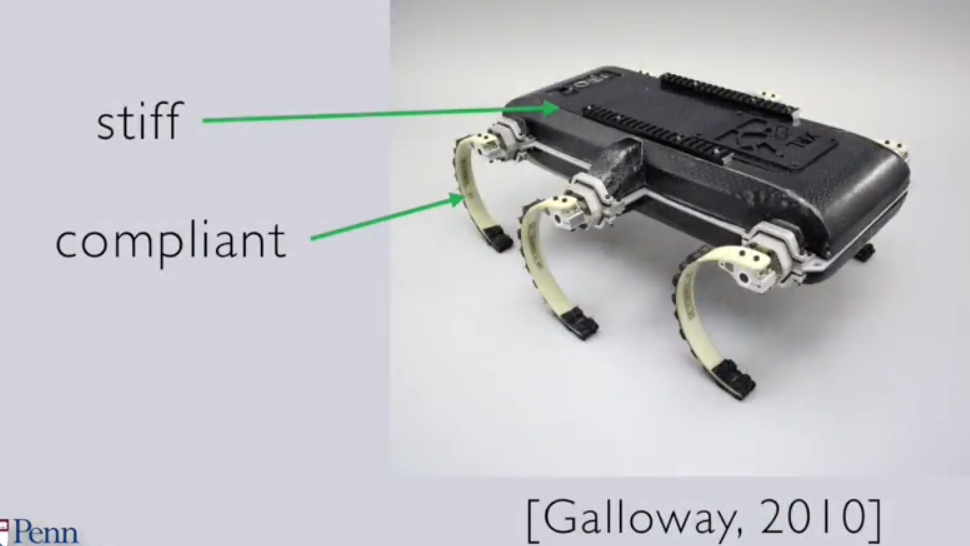

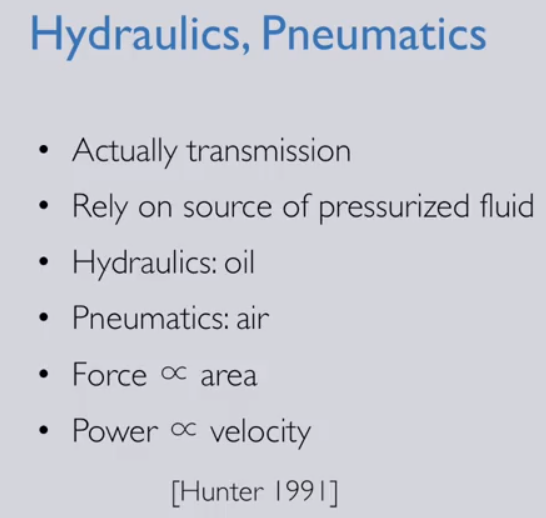
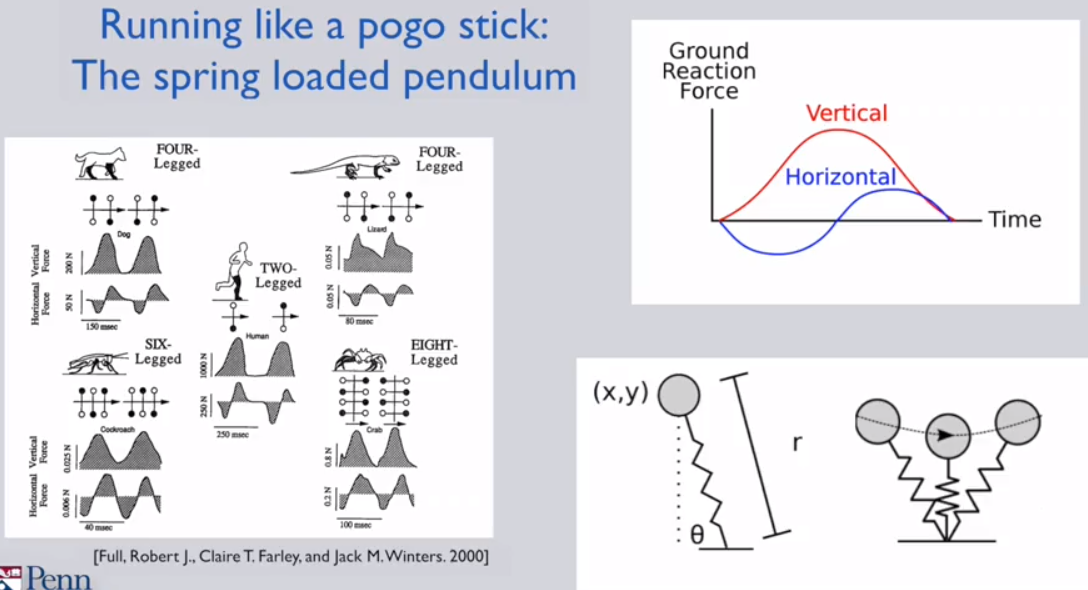
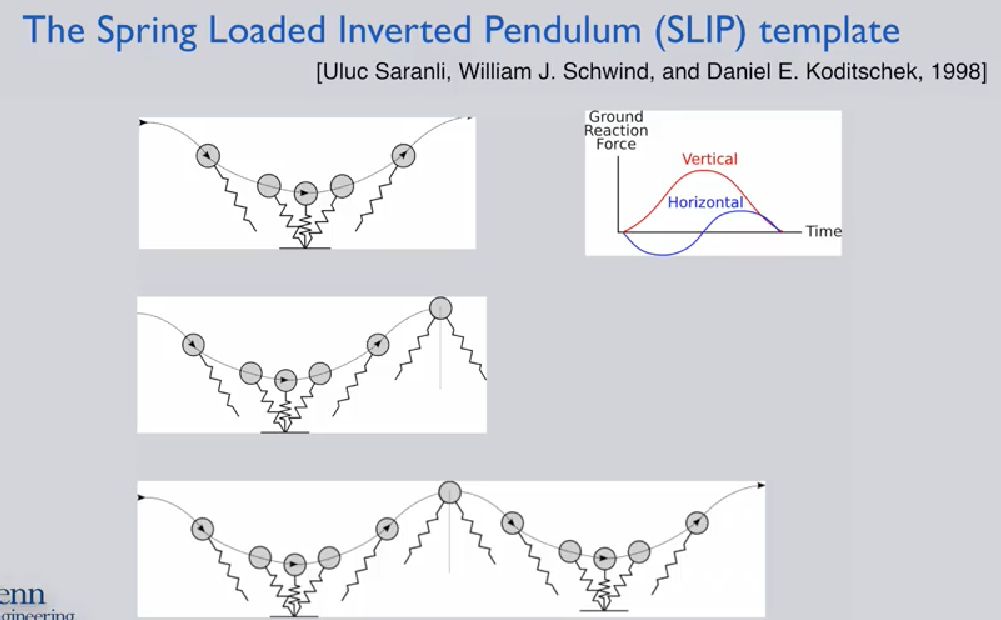
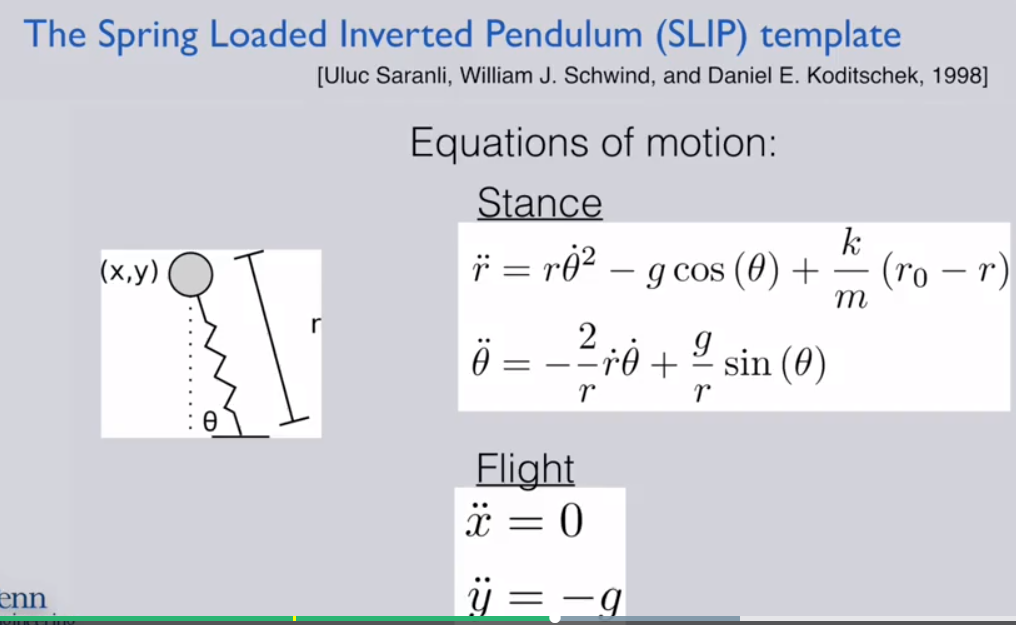
 incompressible
incompressible
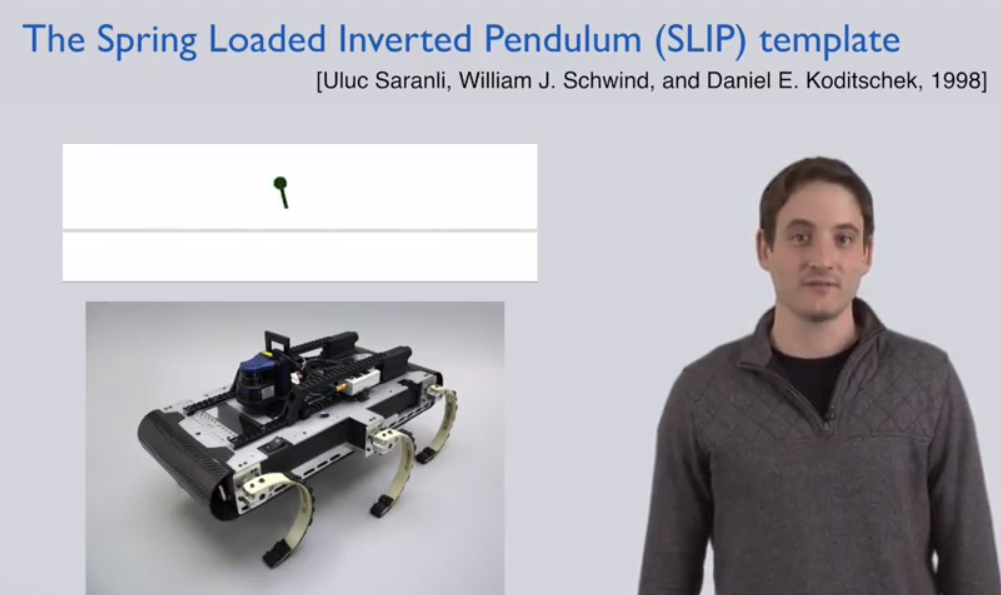
 COMPRESSIBLE
COMPRESSIBLE
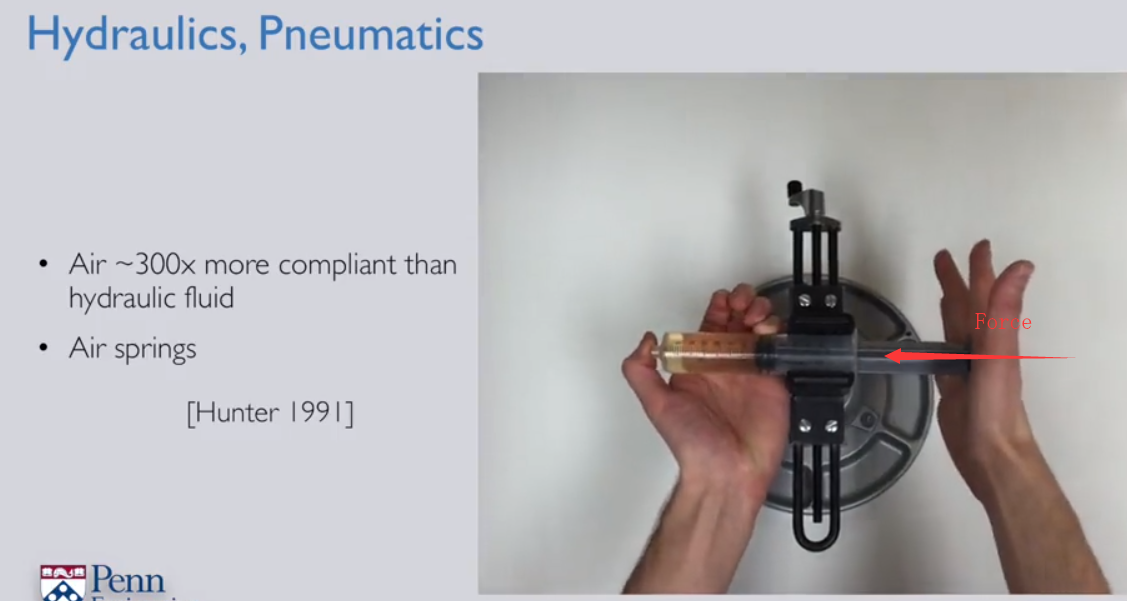
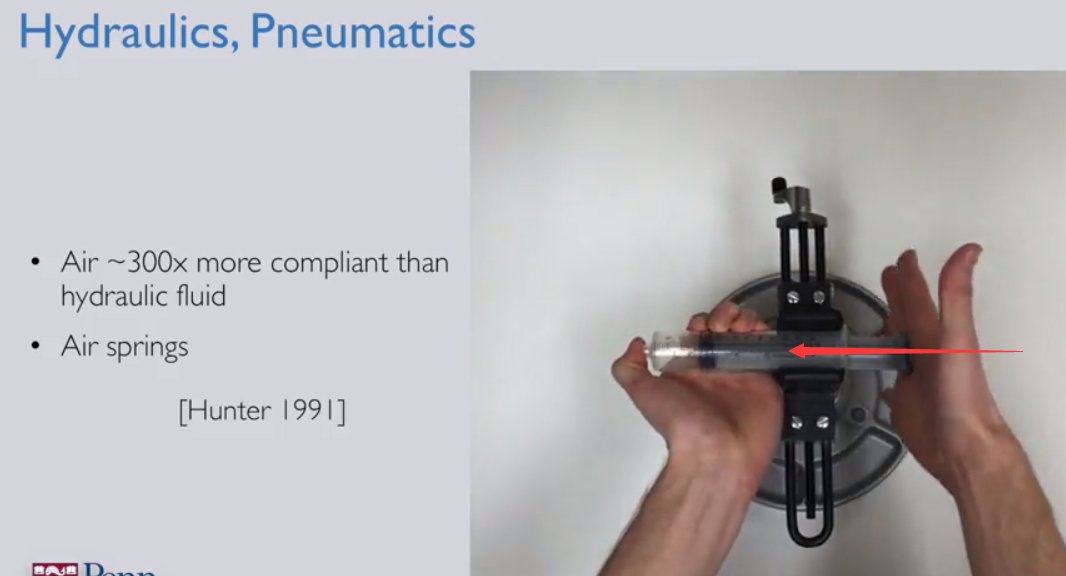
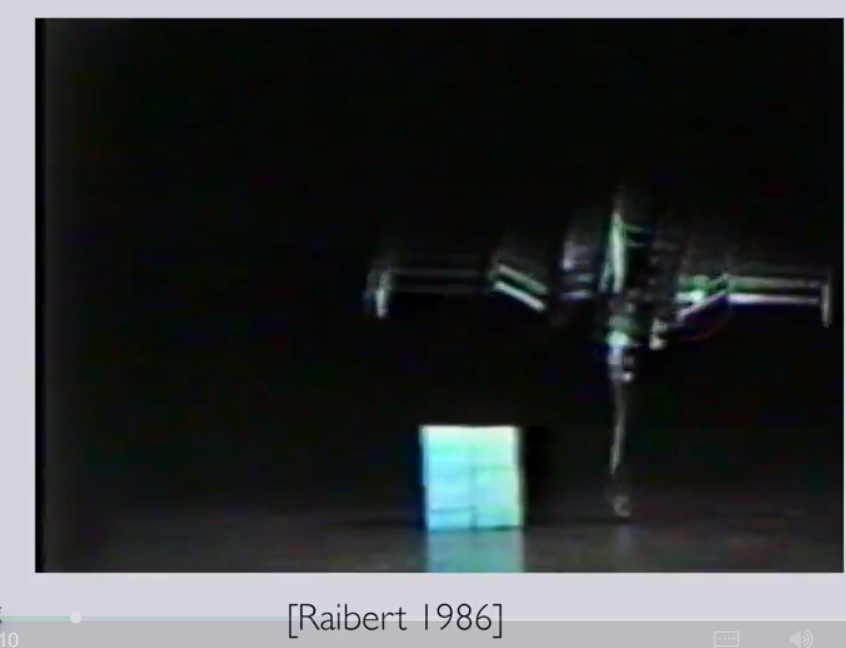 air spring in leg
air spring in leg

 gas engine makes it very loud
gas engine makes it very loud
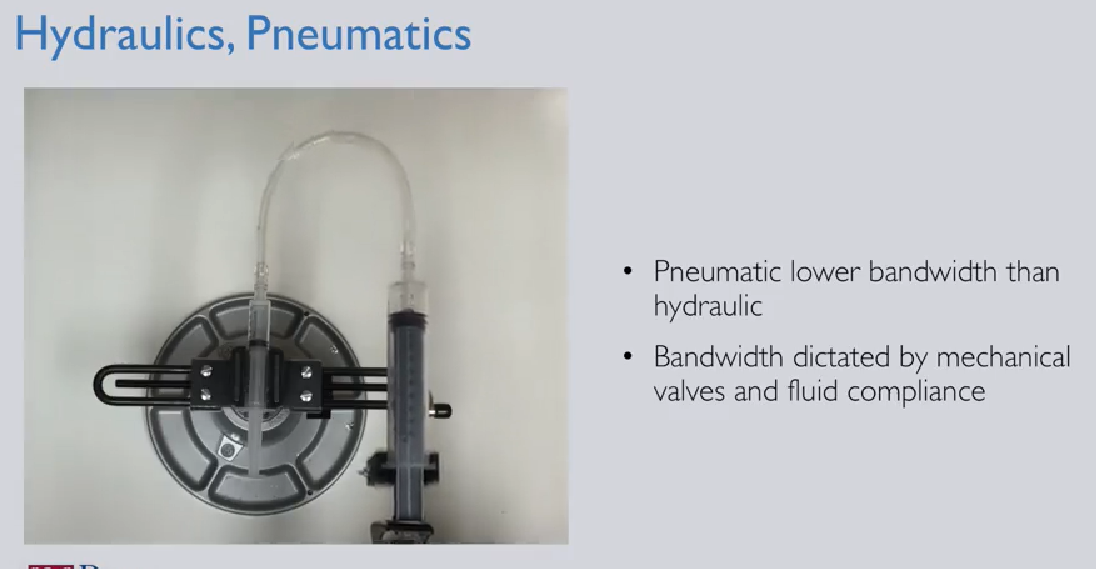
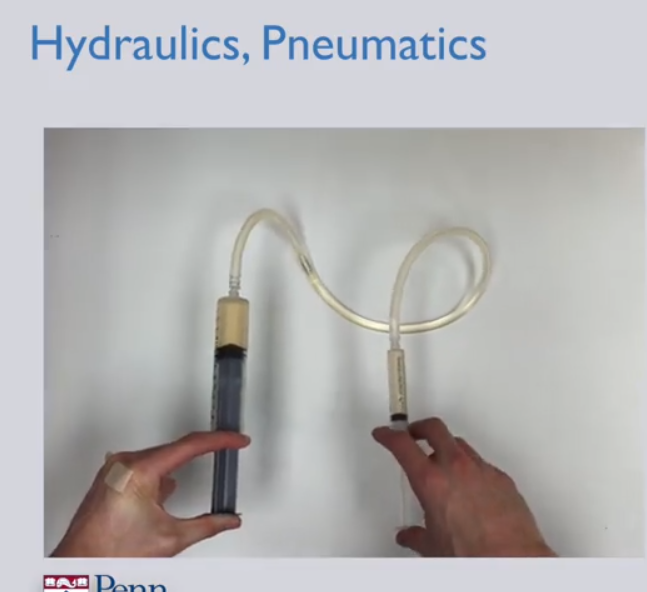
input force in large syringe, and change the input frequency: frequency increases, and output amplitude decreases tremendously!!!

oil actuator doesn;t have this amplitude reduction!!!
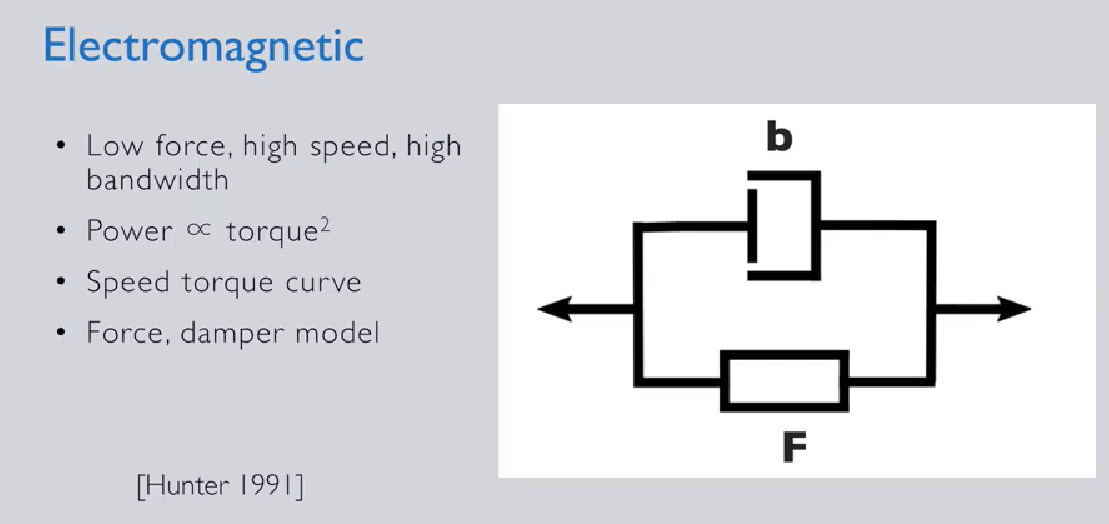
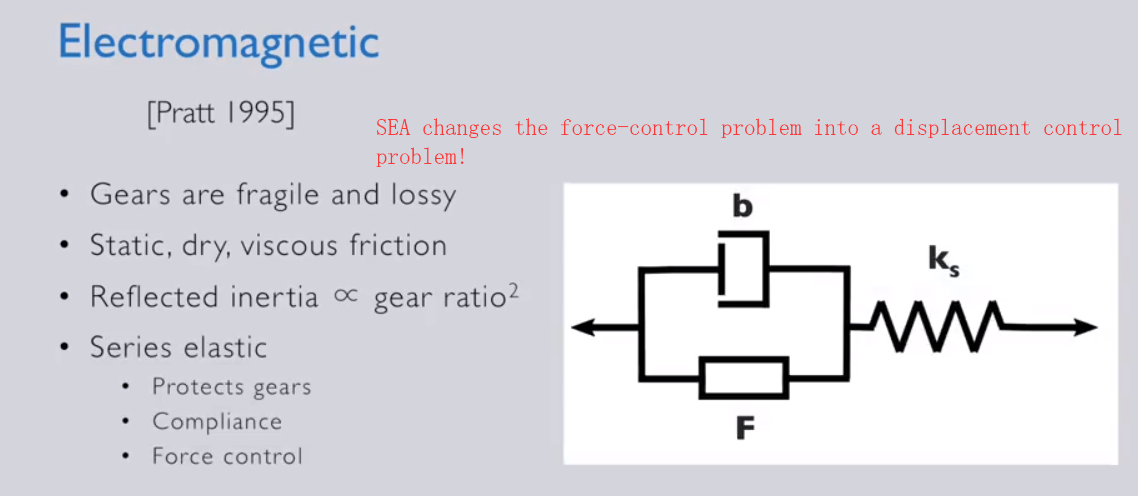
 SEA will attenuate the information! and remove the gearbox can also increase the transparency!
SEA will attenuate the information! and remove the gearbox can also increase the transparency!
 called Minotaur
called Minotaur

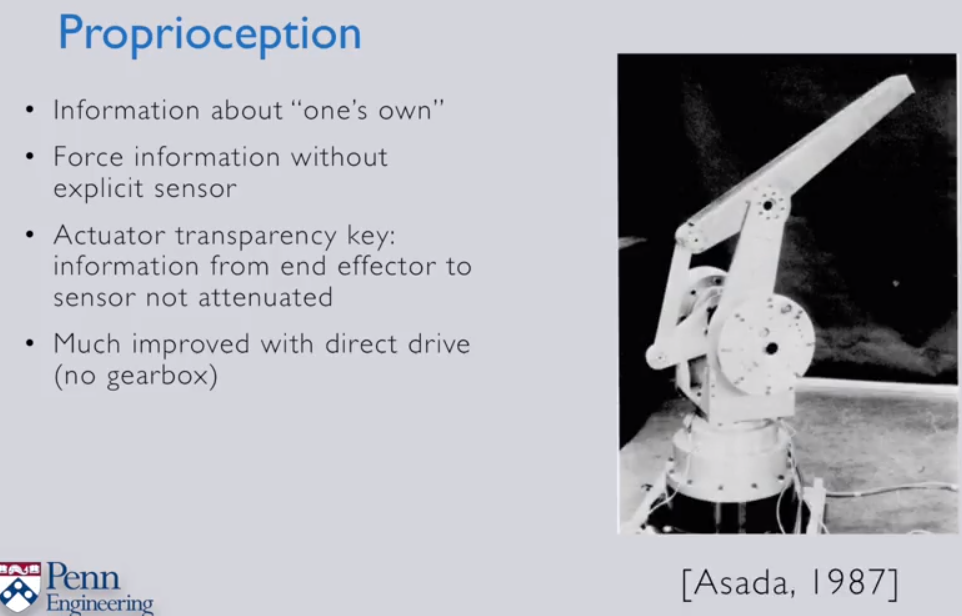
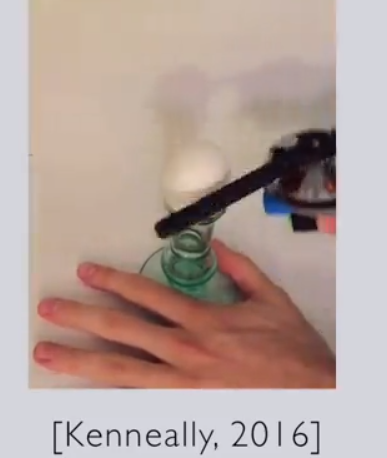
direct actuation has high transpancy, so it can sense the appearance of egg easily
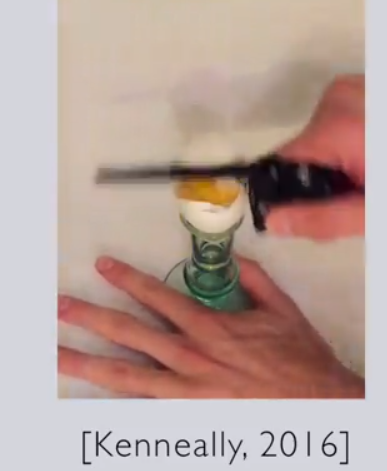
actuator with gearbox breeeeeeeeeeeaks the egg.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号