UPenn - Robotics 2:Computational Motion Planning - week 3: Probabilistic Road Maps


https://blog.csdn.net/DinnerHowe/article/details/80267062
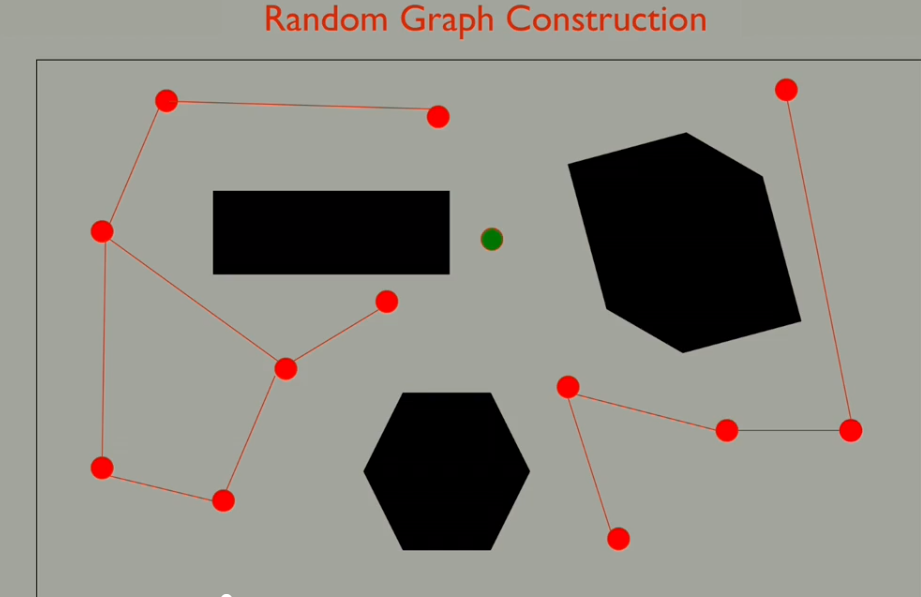
1, initialize by random sampling
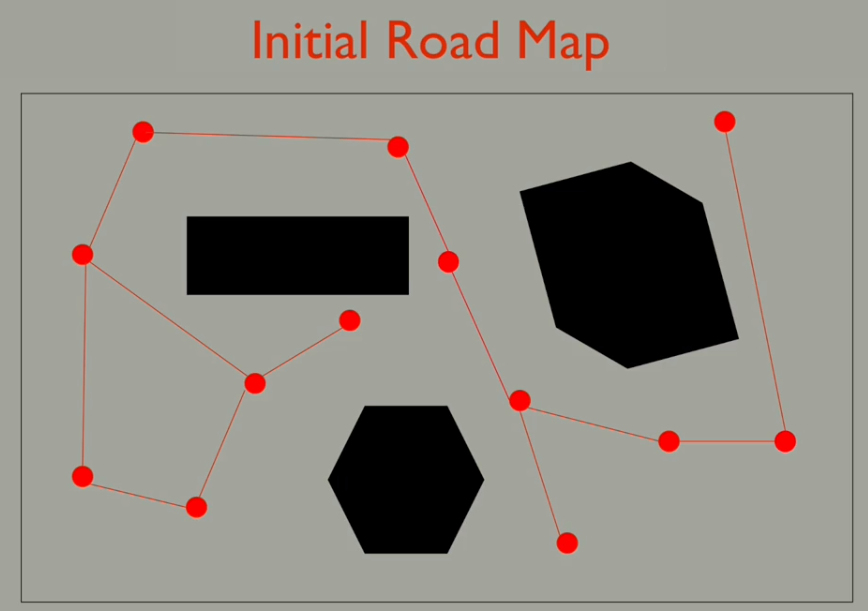
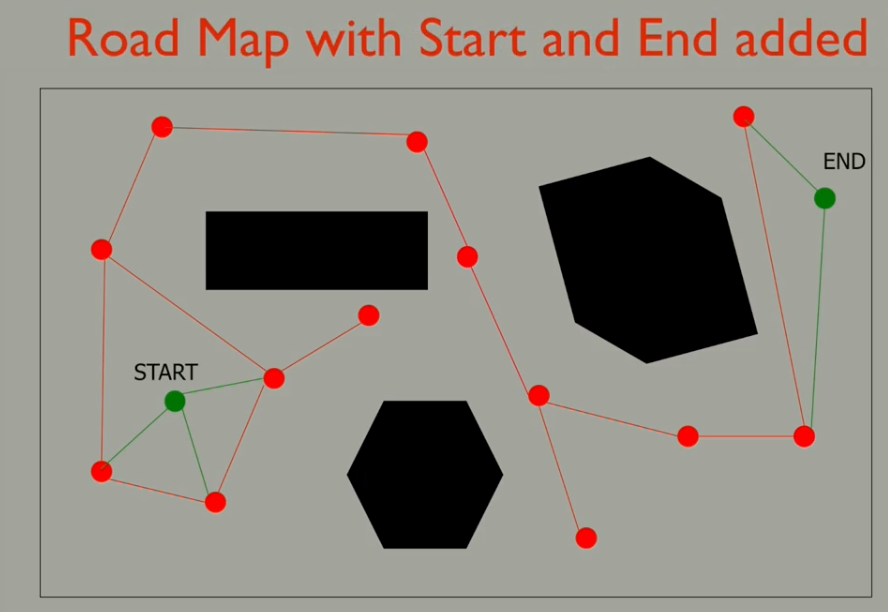
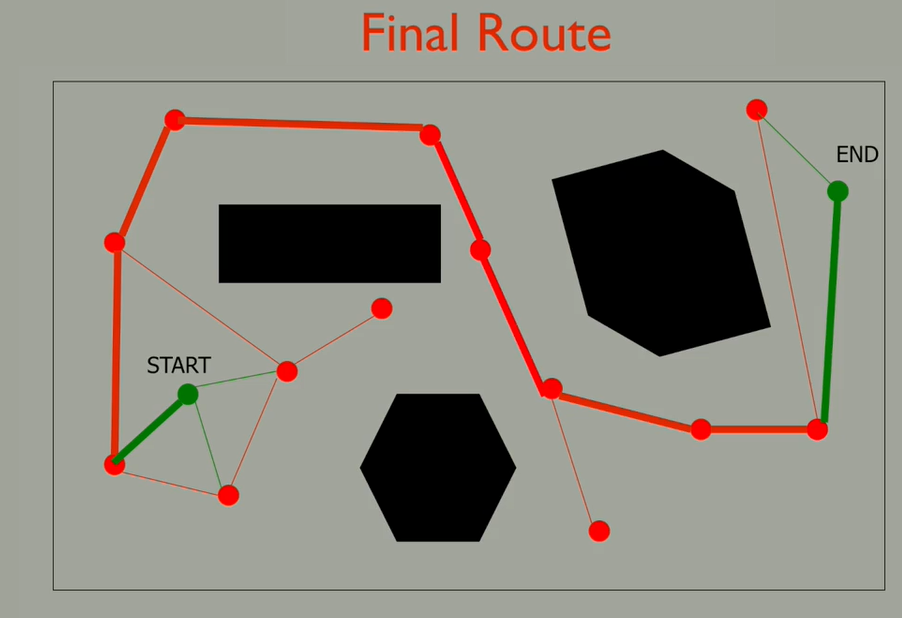
PRM is not Not complete
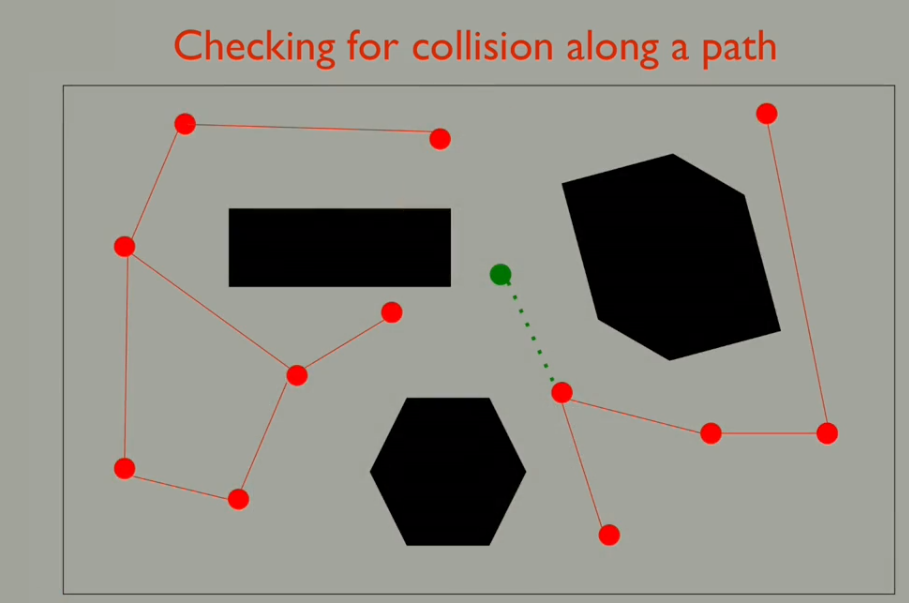
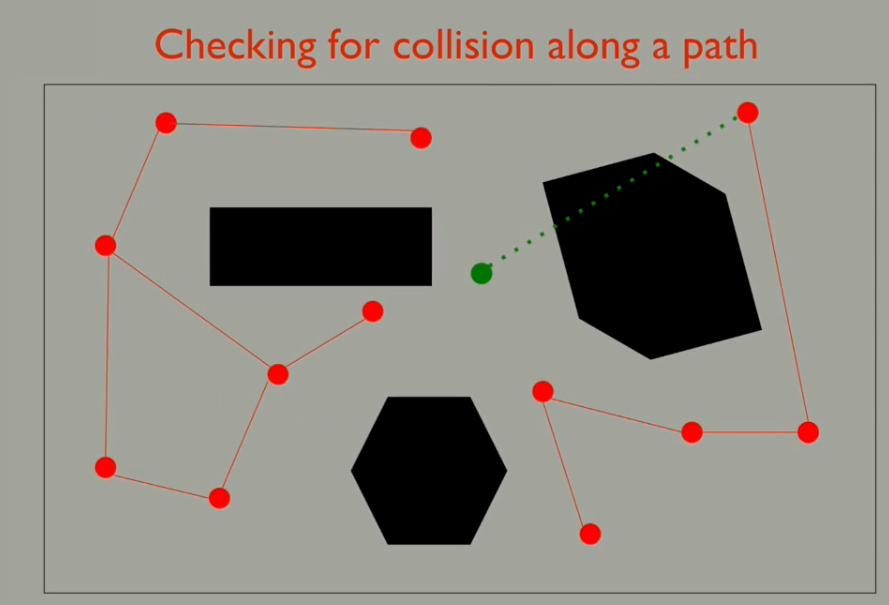
Edge case:

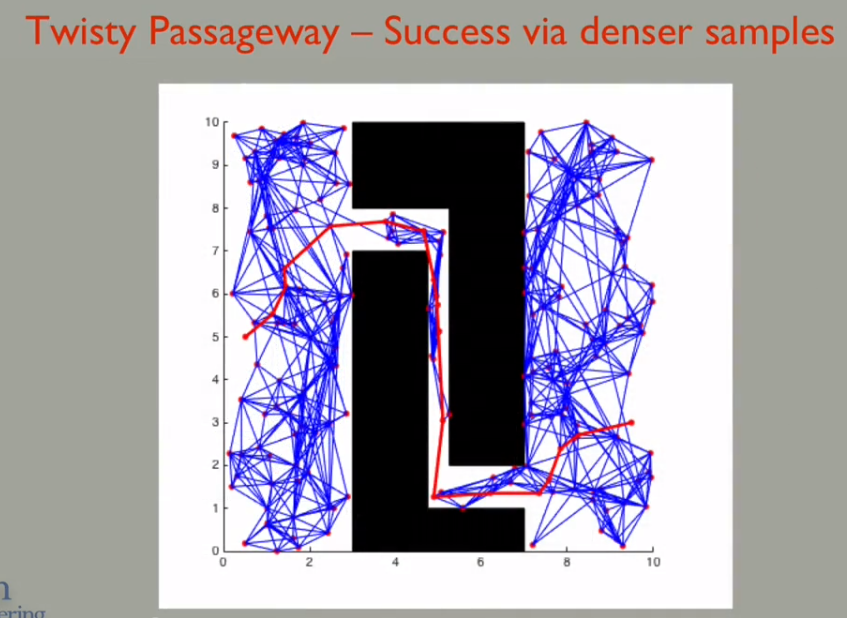 only probably complete, one stratety is to generate more samples between closed barriers.
only probably complete, one stratety is to generate more samples between closed barriers.


(PRM buiding the map, whcih can be used in multiple tasks, but it's not efficient when only have to solve one problem and search the entire free space)
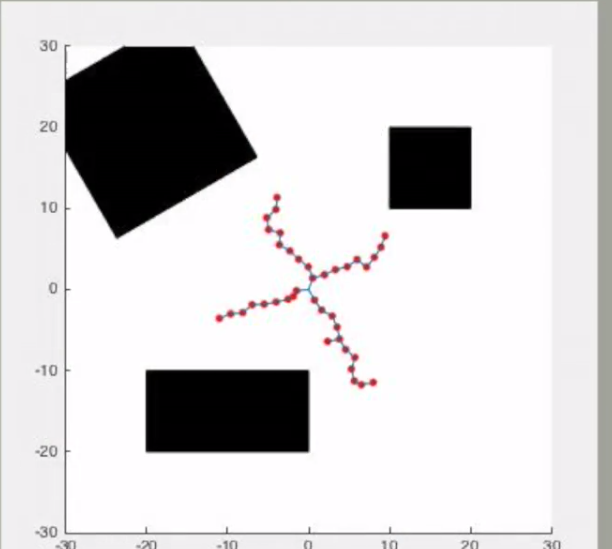
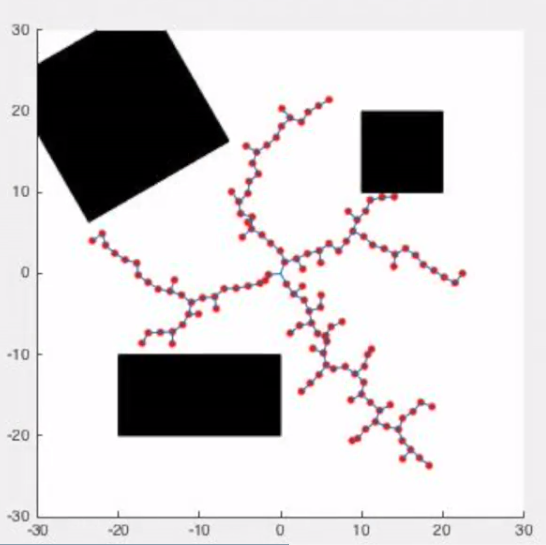
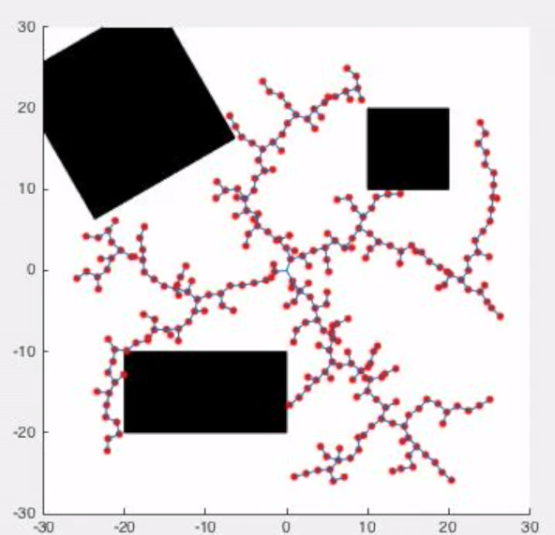
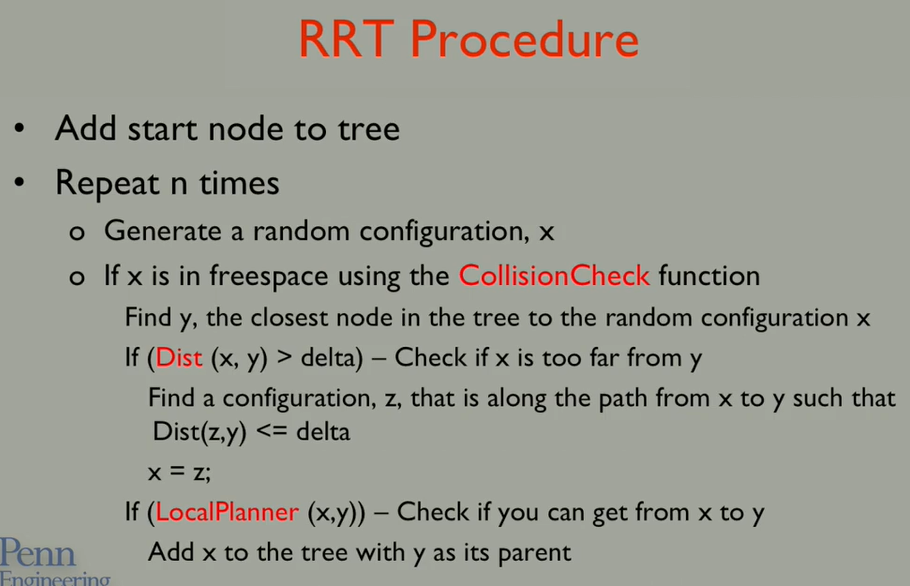
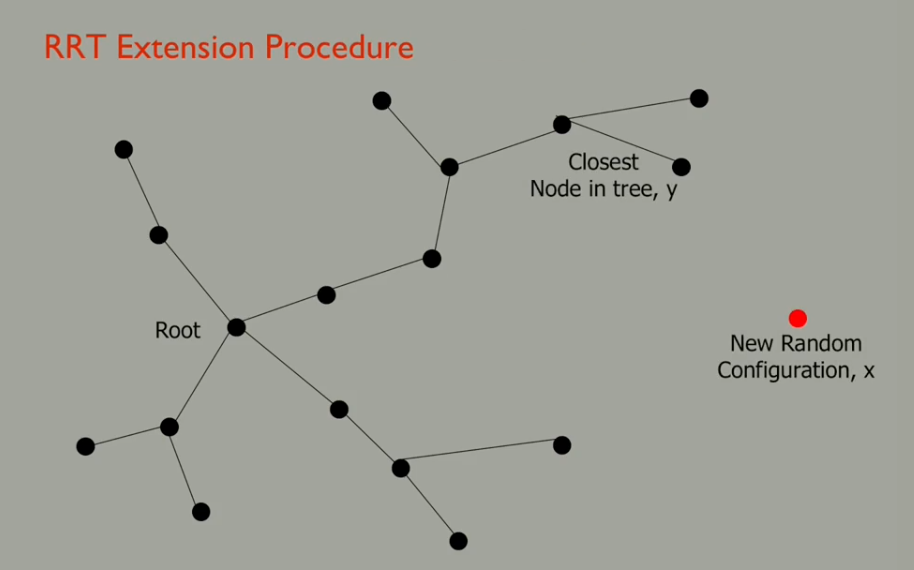
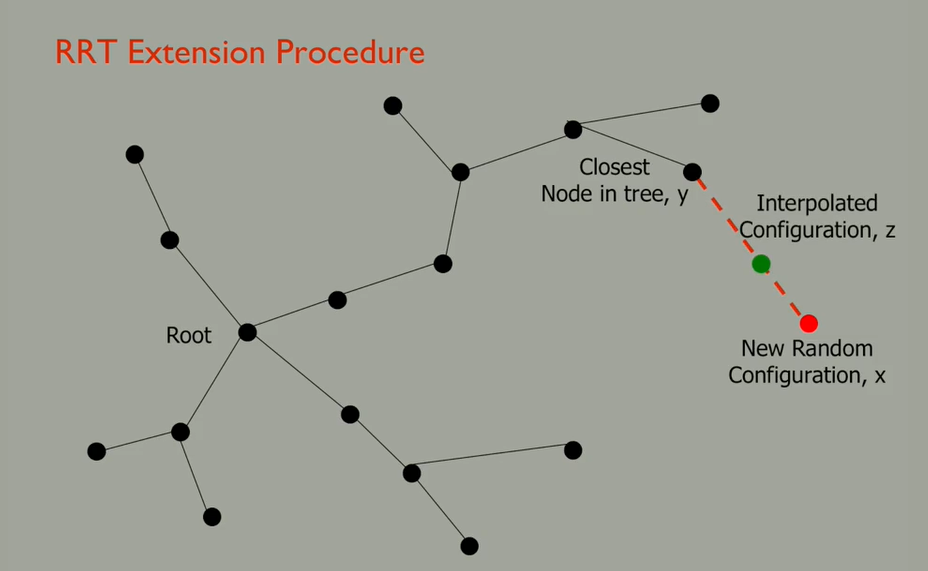
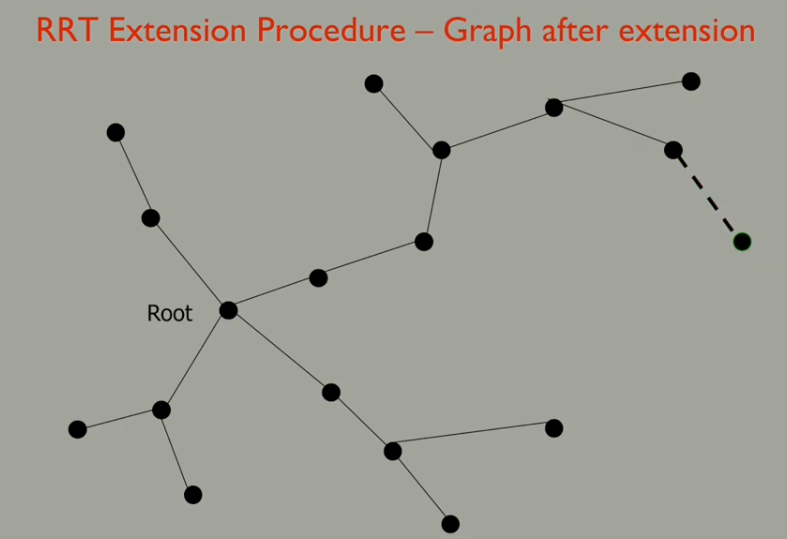
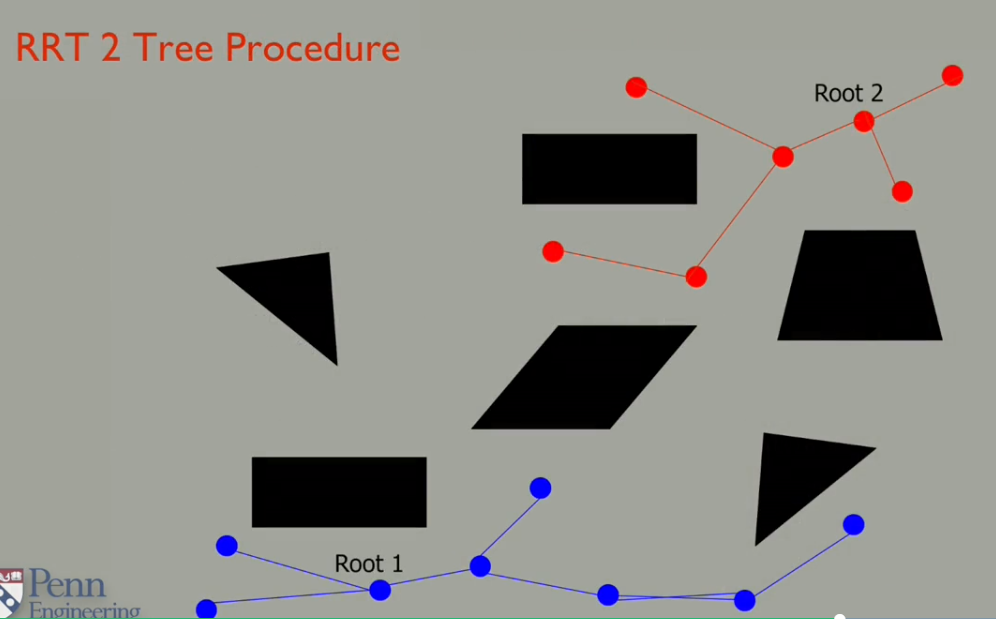
Rapid Exploring Random Trees (RRT)

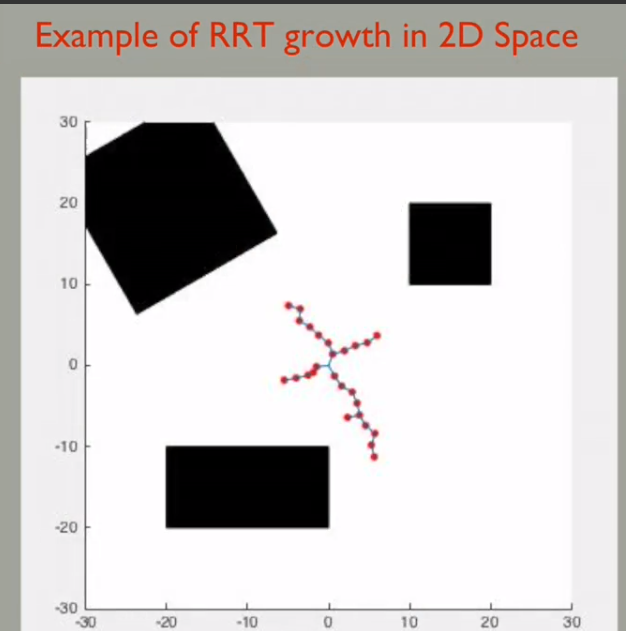


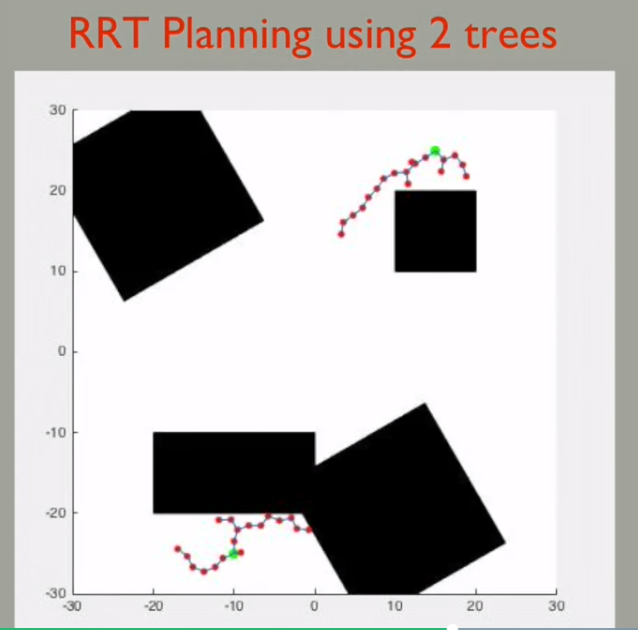

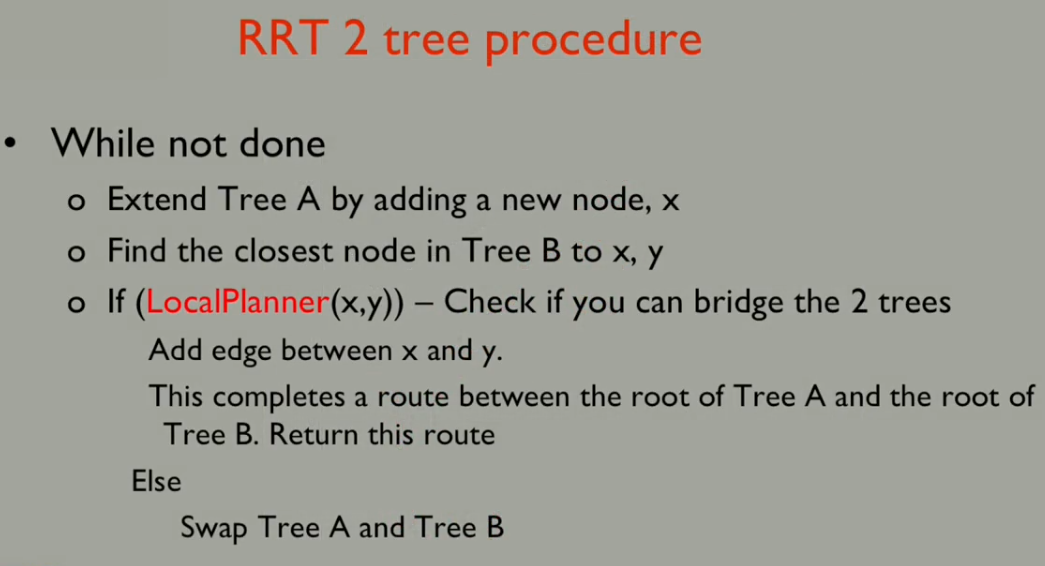
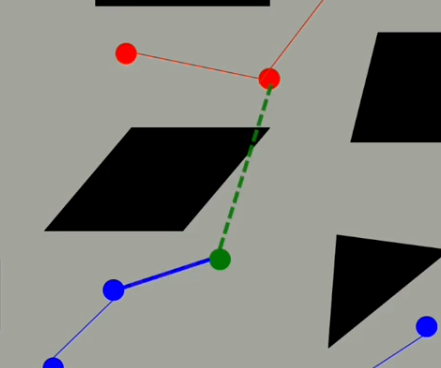
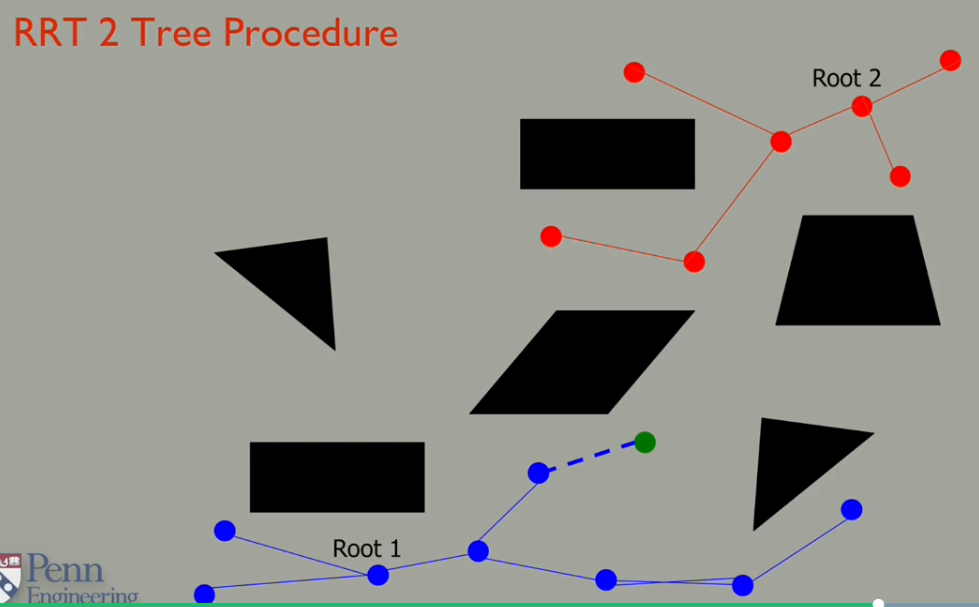 check if green node (new node in blue tree) can be lined to the red tree
check if green node (new node in blue tree) can be lined to the red tree
 not succeed
not succeed

 succeed this time
succeed this time
Another important feature of the RRT approach is it can be used on systems that
have dynamic constraints, which limit how they can move.
Example: Car-like robot

 浙公网安备 33010602011771号
浙公网安备 33010602011771号